
智能避障小车系统设计研究
2021-06-28 08:50周涛
电子测试 2021年1期
周涛
(电子科技大学成都学院工学院,四川成都,611731)
0 引言
在大数据时代背景下,每个人的生活方式和习惯都受到了巨大影响,智能设备逐渐丰富我们的生活,在餐厅、酒店、医院、办公楼、快递站等地方,智能避障小车的使用也更加普及。智能避障小车系统在传统避障小车设计基础上,增加各种不同类型的传感器,采用物联网方式设计,增加OTA功能,以满足不同场所、不同使用环境的需求,提高避障能力。
根据产品功能设计理论,智能避障小车的功能方法主要包括:自动避障设计、联网在线升级设计以及多传感器联合避障设计等。从上述三个方面的设计综合结果来看,采用多角度设计的智能避障小车,能够实现自动避障、语音报警、图像处理以及在线升级等信息交互功能,智能避障小车的外形通常需要根据应用场合设计,例如具备防水功能的水下探测避障小车;兼顾货物运输的运输避障小车;辅助盲人的辅助避障小车等。综上所述,就常用的避障小车来说,以特定的受众对象为基础,功能单一,早已无法满足市场需要。采用三种设计方法综合得出的设计方法,通过多角度进行设计,可以明显提高避障小车的避障能力,还可以非常直观地表达设计师的理念,而且具有良好的市场前景和经济价值。
1 智能避障小车系统方案设计
系统主控芯片基于STM32F4平台,智能避障小车系统完成的主要功能是能够自动驾驶或按照指定路线驾驶,实现循迹、自动避障、自动复位驾驶、语音提示播报、联网升级等功能。能够在道路中稳定行驶,且在检测到岔路、障碍物时能按程序设计进行正确操作。
传感器采用红外传感器模块、超声波传感器模块、雷达传感器、摄像头模块等传感器获取周围环境、障碍物的信息,经过相关算法计算,对小车的运动方向和运行速度进行精确控制。对整个智能避障小车系统的硬件进行设计制作、软件进行设计和程序的编写以及程序的调试,软硬件联合调试最终完成软件和硬件的融合,实现智能避障小车系统的目标功能。智能避障小车系统结构图如图1所示。
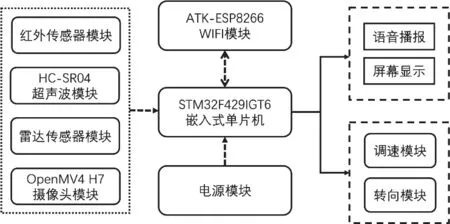
图1 系统结构图
1.1 硬件选型方案
系统设计中,硬件选型方案的关键部分为主控芯片、摄像头模块、WIFI通信模块。
主控芯片采用STM32F429IGT6嵌入式单片机。拥有1024K FLASH,256K SRAM,176个引脚,容量大。芯片内嵌资源丰富:8个串口,3个ADC共24通道,16个定时器,2个DAC通道,2个CAN总线,全速USB OTG1个,DCMI摄像接口等,能够满足设计需求。
WIFI模块采用ATK—ESP8266。模块与主控芯片使用串口建立通信,内部设置有TCP/IP协议栈,能够建立WIFI与串口之间的通信。模块拥有串口转WIFI STA功能、串口转AP功能、WIFI STA+WIFI AP功能,实现快速建立串口转换WIFI的数据传输通道的功能。模块还以接入云服务器,实现远端远程管理,在线下载固件程序、联网升级等功能。WIFI模块实物图如图2所示。

图2 WIFI模块正反视图
摄像头模块采用OpenMV4 H7摄像头模块。该模块采用Cortex-M7处理器,拥有480MHz主频,1M RAM,2M Flash,其中的单个SPI总线速度就可以达到54Mbs,能够把图像流采集数据传输给LCD扩展板或WIFI扩展板或其他主控制器。
2 功能设计方案
智能避障小车系统程序分为三层,分别为:用户层、中间层、硬件层。在硬件层固定的情况下,编写程序改变中间层算法、程序、设计思路,充分发挥中间层的作用,对多种复杂环境,不同的应用场景、使用需求建立数学模型,建立数据库文件,充分发挥中间层的作用,实现对不同用户层的程序支撑,达到应对多种应用场景、使用环境、使用需求的要求。智能避障小车系统程序运行结构图如图3所示。

图3 智能避障小车系统程序运行结构图
2.1 自动避障设计
采用避障小车系统搭载的硬件传感器与软件相互配合,设计实现当遭遇障碍物时能够有效躲避障碍物的预期功能。
2.2 联网在线升级设计
利用系统搭载的硬件ATK—ESP8266 WIFI模块与云端服务器结合,配合不同的应用场景下建立的数学模型、数据库,筛选对应的使用环境,下载匹配的固件版本,升级最新版本的固件,实现OTA在线升级功能,实现有效应对不同的使用环境,满足不同工作的使用需求。同时,当程序算法更新/进一步提升后,能够及时上传安装到硬件端,大大节约了时间。
智能避障小车系统实现OTA(空中下载技术)的功能,需要云端服务器与客户端两种设备相互配合。可以有一个或多个云端服务器,可以有一个或多个客户端。云端服务器通过串口建立通信通道与PC机连接,将需要下载的升级文件储存在PC机内,相应的机制给服务器发送相关命令及镜像文件。
工作过程简述:相应的机制操纵云端服务器,发送最新可用的镜像文件,客户端在接收到文件后会进行分析、判别、甄别,如果存在与客户端相匹配的镜像文件,客户端就向云端服务器请求数据。云端服务器收到请求指令后向相应的机制索取固定大小的文件,再点对点、线对线、面对面的传送镜像文件给客户端。镜像文件发送完成后,客户端需要进行校验,校验完成后会返回一个结束信号到云端服务器,云端服务器关闭镜像文件传输通道。
在智能避障小车系统设计中,主要采用OTA中的基于浏览的方式和推出的方式两种方式进行数据交互。
(1)基于浏览的方式。客户端访问云端服务器,查找服务器内应用菜单,根据客户端需要利用网络从后台访问云端服务器,并下载其中相应的数据到客户端。用户可以根据需要,下载需要的功能的数据包,下载采用WIFI的方式传输,传输速率更高,顺应大数据时代的发展趋势。随着5G技术的普及,移动终端设备需要与云端服务器交互速度将更加快速。
(2)推出的方式。智能避障小车系统可以根据功能类别、市场需求,通过信息或邮件方式向客户端用户发送新功能数据下载的链接通知推送服务,客户端通过该消息的信息提示进行相应操作,就可以实现远程数据更新、程序更新。这种方式比传统PC端有线下载方式更加操作简便、升级流程简单,与其他交互方式相比,减少网络资源消耗,降低了客户端与网络数据的频繁往来。
综上所述,采用OTA能够完成修改节点上运行的系统程序的任务。云端服务器能够向客户端发送程序镜像文件,然后由客户端内部简单短暂的响应之后,镜像程序将覆盖更新原来的程序。新的镜像升级文件通过无线下载存储到空闲空间,要求客户端的存储空间可同时容纳新的镜像文件程序和当前运行程序。云端服务器、客户端运行流程图分别如图4、图5所示。
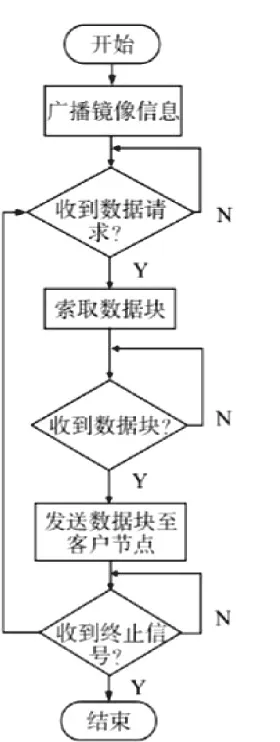
图4 云端服务器运行流程图
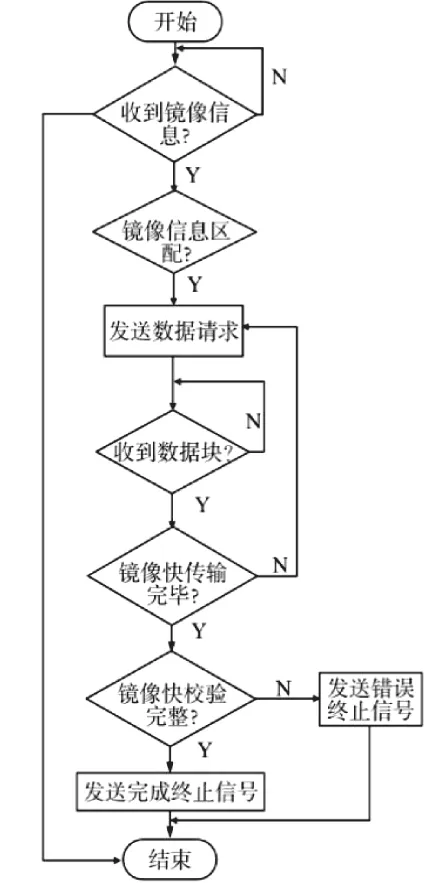
图5 客户端运行流程图
2.3 多传感器联合避障设计
利用系统搭载的不同类型传感器完成检测:
(1)红外传感器感应周围环境中障碍物辐射的红外线,进而返回相应的数据,为智能避障小车系统的软件运行提供相关的数据支撑。
(2)超声波传感器在运行时会发射出超声波,分界面或杂质会让超声波出现反射现象,形成反射回波,超声波传感器的返回值经过一定计算能精准反应障碍物到检测点的距离,进一步提升智能避障小车系统的避障精度、灵敏度。
(3)毫米波雷达传感器在运行时,可以进行连续的全方位扫描,扫描频率快,范围以圆形呈放射状。它的体积更小、集成度更高、空间分辨率更高。它比摄像头传感器、激光传感器、红外传感器等光学传感器,穿透烟、雾、灰尘的能力更强,抵抗干扰的能力更强,具有全天候(雷暴天气等极端恶劣天气除外)全天时的特点。
(4)摄像头传感器能够对障碍物进行图像识别,通过OTA升级存在云端的识别算法和模型,同时云端数据可以不断更新更先进的算法和模型,故能不断提高障碍物的判断效率和准确率,有效减少误判/错判的几率,提高智能避障小车系统的避障能力。数据交互测试数据如表1所示。

表1 OTA数据交互测试数据
3 结论
在智能避障小车系统的设计中,通过自动避障设计、联网在线升级设计以及多传感器联合避障设计等设计角度综合分析得出的设计方案,研发、设计、制造出的智能避障小车系统在传统避障小车的基础上,解决了功能单一、避障灵敏度等问题,利用多种类似的传感器进行信息采集测量,配合大量的数据分析,有效提高了避障小车的精度、灵敏度以及避障能力,扩宽了智能避障小车的应用场景,满足了目前的市场需求。
猜你喜欢
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
现代装饰(2020年5期)2020-05-30
传媒评论(2019年5期)2019-08-30
文苑(2018年22期)2018-11-19
传媒评论(2018年4期)2018-06-27
传媒评论(2018年4期)2018-06-27
电子制作(2018年8期)2018-06-26
初中生(2017年3期)2017-02-21
小学生优秀作文(趣味阅读)(2017年3期)2017-02-11
