基于倾斜摄影测量的实景三维建模与精度评定
2021-06-25 11:10贺璐方胡新玲肖桂园田杨
电子测试 2021年4期
贺璐方,胡新玲,肖桂园,田杨
(新疆大学建筑工程学院,新疆乌鲁木齐,830046)
0 引言
本文以无人机倾斜摄影测量技术展开,以全要素实景三维和离散三维点云为研究对象,在综合分析了三维建模的流程基础上,结合应用控制点布设优化技术、倾斜影像空三加密技术、倾斜影像的瓦片分块技术、三维重构技术、点云分类等关键技术和理论,构建一套完整的基于无人机倾斜摄影技术的三维建模方案,并对基于全要素实景三维环境下大比例尺测图可行性进行精度验证。
1 无人机倾斜摄影测量的建模作业流程
1.1 实验测区概况
实验项目测区属城镇区,为新建城市,特点为城市面貌变化较快,新地物增加较快,测区总面积10平方公里。测区平面坐标系采用CGCS2000国家坐标系,高程采用1985国家高程基准。
1.2 仪器设备
本次实验采用无人机倾斜摄影测量技术手段,所用的无人机为IFAUAV-3型无人机,搭载索尼α7RII相机。正摄相机使用35mm焦距的镜头,其余4个倾斜相机使用50mm焦距的镜头,倾斜相机角度为45度。相机采用手动模式(M档),光圈6.3,快门1/1600S-1/1250S,ISO使用的是自动。此设置曝光量适中,所摄影像既满足相移限制要求,又满足影像质量要求,地面分辨率为4cm。
1.3 空中三角测量
本次针对无人机倾斜摄影数据的特殊性,采用多视角影像联合平差的技术方法进行空三加密。采用最新建模软件ContextCapture Center Edition 4.4.8,进行空三测量及后续模型、TDOM的生产。

图1 空三流程
1.4 三维模型建设
(1)初始化建模区域
根据作业区实际范围,划定建模区域。由于建模需要在标准直角三维空间坐标系内进行,因此软件会将项目切块坐标系统转换为笛卡尔三维坐标系。建模区域会划分根据用户需要,以长宽相等的正方形瓦片为划分的最基本单位,每个瓦片(Tile)是三维建模的最小单元。
(2)建立三维像对
基于空三平差输出的外方位元素成果和相机安置位置关系,软件可以自动寻找合适的两张影像组成三维像对。
(3)生成像对点云
对Tile内包含的所有三维像对分别进行点云匹配计算,并将这些像对点云进行汇总合并与过滤。
(4)构建三维TIN网
将前面环节得到的点云利用CCC软件独有算法进行三角网化处理,在这个过程中,一些异常的点由于无法构建正常的三角形而被作为粗差点进行舍弃处理,如图2所示。
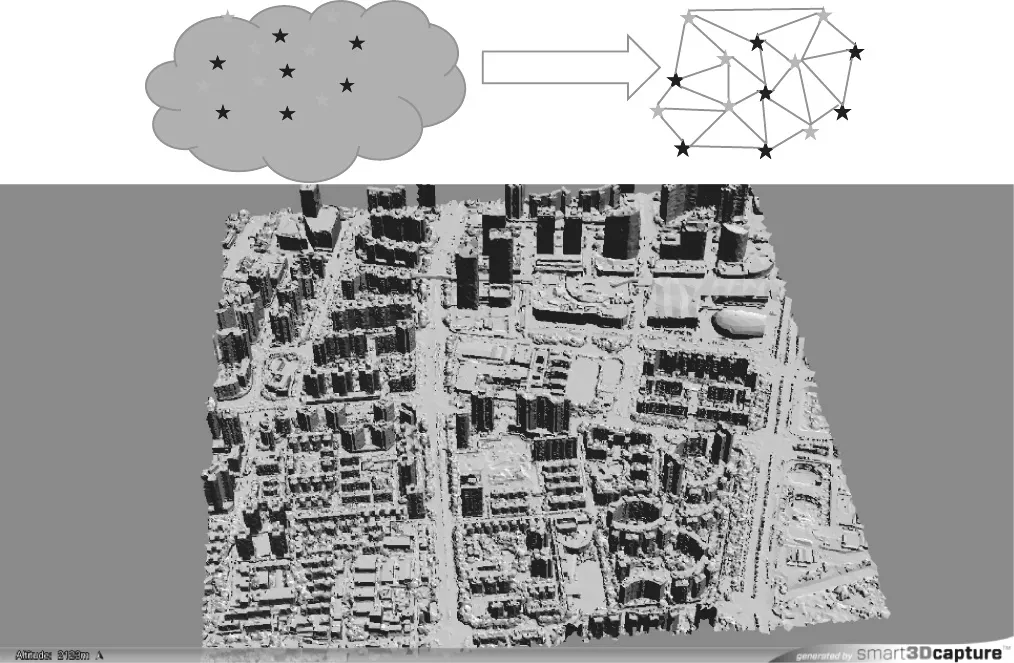
图2 构建三维TIN网
(5)TIN网优化
CCC可以对不规则三角网进行自动检测评估,可以对不合理的三角网表面进行自动优化,对平坦表面的三角密度实现自动简化稀疏化处理,同时对复杂表面的三角网密度予以保留,如图3所示。

图3 TIN网优化
(6)纹理匹配
CCC可以根据TIN网中每个三角形的空间位置,自动映射最佳视角的影像作为模型纹理,如图4所示。

图4 纹理匹配
(7)三维实景模型生产
对空三合格的分区根据三维TIN的空间位置信息,自动寻找最佳视角影像,并完成模型纹理的构建,最终形成完整且真实的三维模型体,如图5所示。

图5 三维实景模型生产
模型经过目测检测,无空洞、无异常破面,超出像控以外的部分尽可能都裁剪掉,保证了边缘的整齐美观。
2 模型精度分析
模型的实际精度评定包括模型的平面精度、高程精度评定。外业检测点采用GNSS-RTK测量方法和全站仪测量方法实测明显地物点和高程点,与实景模型相关模型点对照进行精度统计。
本次实验共选取了30个平面检测点,如表1所示。
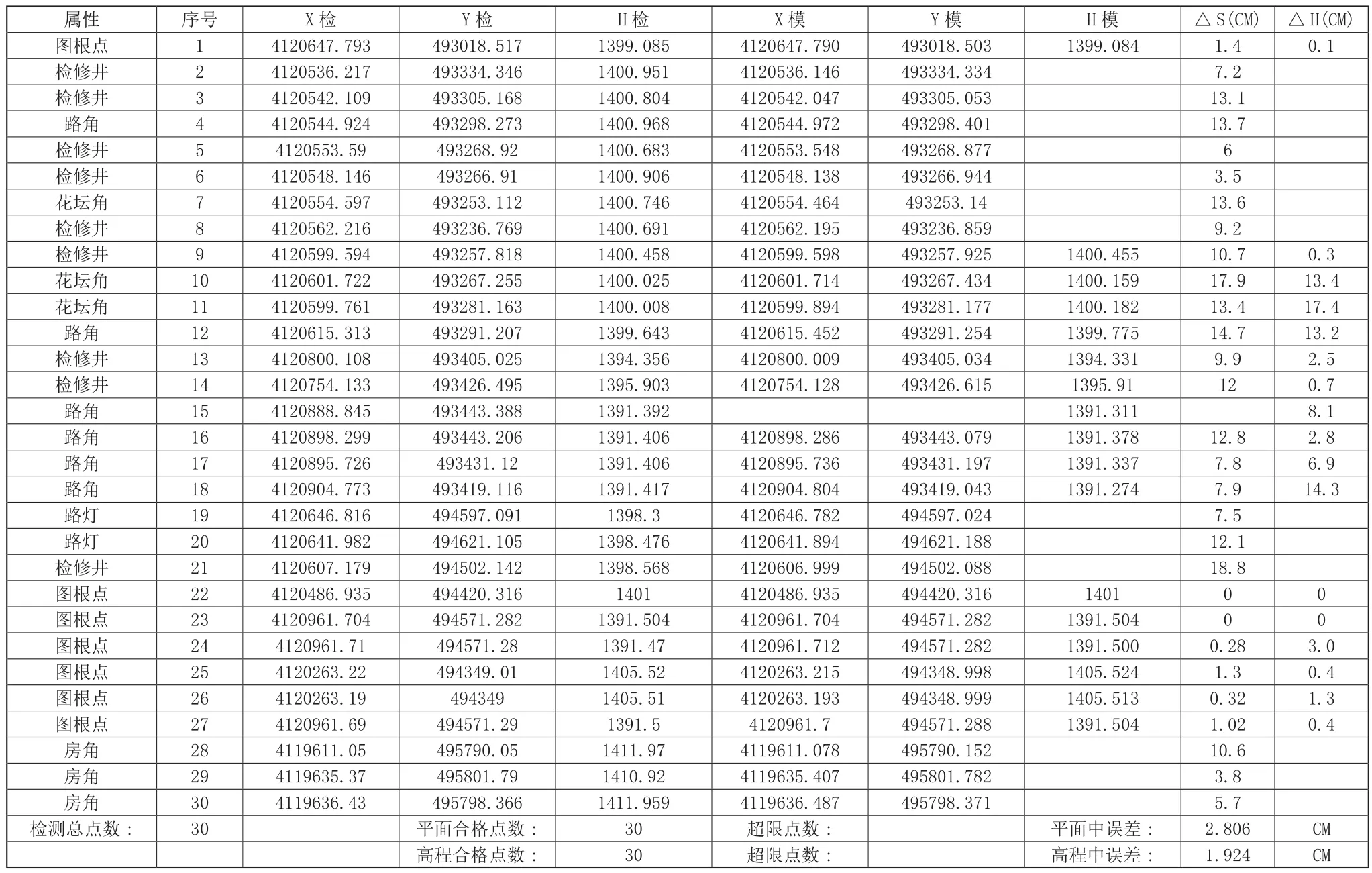
表1 平高检查点精度统计表
利用中误差计算公式计算模型平面点位和高程精度,公式如下:

通过对生成的三维模型进行精度评定,该测区形成的三维模型,平面点位中误差为+0.02806m,最大误差为0.188m,小于大比例尺测图规范要求的平面0.3米的限差;高程中误差为+0.01924m,最大误差为0.174m,小于规范要求的1/3等高距(0.33米)的限差。
3 结束语
本文采用了倾斜摄影实景三维建模技术,该技术可以快速的恢复现实的立体模型,精度高、效率高、真实反映现状地物。大大降低了城市三维建模的成本,提高了建模的效率。
从平面与高程精度分析可知,利用无人机倾斜摄影测量技术进行三维建模的精度与真实度分布比较均匀,并且倾斜摄影建模已经符合测绘级精度,能为1:500大比例尺测图奠定数据基础,并完全符合《三维地理信息模型数据产品规范》精度要求。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16
华人时刊(2021年23期)2021-03-08
理论与创新(2020年15期)2020-10-09
辽宁省博物馆馆刊(2020年0期)2020-08-13
企业科技与发展(2018年5期)2018-09-10
北方音乐(2017年4期)2017-05-04
智能计算机与应用(2017年2期)2017-05-04
长江工程职业技术学院学报(2014年4期)2014-11-30
测绘科学与工程(2014年2期)2014-02-27
地理空间信息(2011年2期)2011-09-27