
面向目标定位的多无人机自组织方法研究
2021-06-25 14:17陈国春毛新军沈宇婷赵伟伟张少波
软件导刊 2021年6期
陈国春,毛新军,杨 硕,沈宇婷,赵伟伟,张少波
(1.国防科技大学计算机学院;2.国防科技大学复杂系统软件工程重点实验室,湖南长沙 410073;3.中国科学院国家空间科学中心,北京 100190;4.中国科学院大学,北京 100039;5.中国电子科技集团公司第五十四研究所,河北 石家庄 050000;6.湖南科技大学 计算机科学与工程学院,湖南 湘潭 411201)
0 引言
与单无人机执行任务相比,多无人机协同执行任务通过多机多传感器进行多方位信息感知,从而获得对环境状态更全面的认知[1];通过将总任务分解成多个子任务,并合理分配给多个无人机执行,从而简化了任务复杂度,提高了任务执行效率[2];通过自组织方法及时替换故障无人机,以保证任务的正常执行,提高了系统鲁棒性[3]。因此,军事和民用领域广泛应用多无人机协同执行任务,如军事侦察[4-6]、目标检测[7-8]等。在任务执行过程中,无人机群通常需要保持特定的空间结构以满足任务要求。因而快速形成符合任务要求的空间结构,对提高多无人机的任务执行效率具有重要意义。
本文以多无人机协同对单目标定位作为任务,至少需要4 架不在同一平面上的无人机,且4 架无人机到目标点的距离相等。根据数学原理,这4 架无人机在以目标点为中心、某一常数值为半径的球面上。因此,这4 架无人机可唯一确定球心的位置,即目标点位置,如图1 所示。4 架无人机(UAV1~UAV4)到目标点距离相等的问题可等价于两组3 架无人机(UAV1~UAV3、UAV2~UAV4)到目标点距离相等的问题。所以,为简化问题,将其转换为如何使3架无人机到目标点距离相等,也即目标点在经过3 个无人机组成的三角形外接圆圆心且与该圆平面垂直的直线上。

Fig.1 Spatial structure of four UAVs with equal distance to the target point图1 4 架无人机到目标点距离相等的空间结构
文献[9]、[10]中指出,距离目标点越远,信号强度越弱,且对于同一目标,测得信号强度相等的点到目标点距离相等,则问题等价于如何使3 架无人机到目标点的信号强度相等。由于实际信号在强度测量时存在误差,信号强度很难绝对精确,因此问题可等价于如何使3 架无人机到目标点信号强度的差值不超过满足条件要求的阈值。
针对上述问题与挑战,本文以多无人机目标定位为任务,将无人机群抽象为一个发散式的多智能体系统,形成基于多智能体的多无人机系统模型。基于该模型,本文提出多智能体自组织协同方法,该方法采用三边极差收敛算法,以快速形成各无人机到目标点距离相等的空间结构。
1 相关工作
已有研究中关于单无人机对单目标点的定位,需要较多的位置与角度信息,如无人机到目标点的方位角、俯仰角,以及无人机与目标距离、无人机自身位置坐标等[11],测量方法较为复杂,且定位结果存在累积误差[12]。因此,当前主流工作围绕多无人机协同定位展开。
多无人机协同定位相关工作主要采用以下几种方法:Leader-Follower 方法[13-16]、基于个体行为的方法[17-18]与人工势场法[19-21]。这些方法各有优势与不足。Leader-Follower 方法能较好地维持空间结构,但该其过于依赖Leader的可靠性。如文献[13]提出将无人机群的中心位置作为一个虚拟Leader,有效解决了Leader 可能出现故障的问题,但存在难以实时计算出无人机群中心位置的问题。基于个体行为的方法事先设定无人机行为规则,系统内各无人机可根据任务指令采取相应行为模式,但这种分布式控制方法难以实现群体行为,即难以形成所需的空间结构。如文献[17]使用该方法实现了在环境未知且有障碍物情况下的集群控制。人工势场法能有效避免无人机间的碰撞,但在形成空间结构过程中可能陷入局部最小值,无法形成所需的空间结构。如文献[19]综合考虑速度状态信息、动态安全距离等要素,修正了传统人工势场法,效果较好。但这些方法都没有将无人机群视为一个整体,未充分利用多无人机相互协同配合完成任务,没有体现无人机群的群体智能性。
本文利用多无人机协同的优势和多智能体建模的特点,将无人机群抽象为一个发散式的多智能体系统,提出多智能体的自组织协同方法。该方法采用三边极差收敛算法,以快速形成各无人机到目标点距离相等的空间结构。
2 基于多智能体的多无人机系统模型
无人机作为独立的行为主体,有其相应的属性及行为,如自身状态信息属性、飞行行为、定位行为等;能根据指令采取相应行为,具有一定的自主性;能通过机间通信链路进行信息交流,实现局部通信。多无人机系统可根据任务需求进行任务分配,并通过相互之间的信息交流实现无人机间的协调与协作,将个体自主性演化为群体智能性。本文将多智能体技术引入到多无人机系统建模过程中,将单个无人机建模为一个智能体,通过智能体对单个无人机属性及行为进行模拟,并使智能体与智能体之间、智能体与环境之间进行信息交互,实现智能体之间的相互协调与协作,形成基于多智能体的多无人机系统模型,如图2 所示。通过对未知环境下的无人机群进行建模仿真,评估与分析自组织行为在多无人机空间结构形成过程中的影响。本文以多无人机目标定位任务为背景,以快速形成任务要求的空间结构为目的,提出一种基于多智能体的多无人机自组织系统模型。

Fig.2 Multi-UAV system models图2 多无人机系统模型
2.1 单个无人机智能体模型
无人机作为具有一定自主性的独立行为主体,被抽象为智能体。作为多智能体系统中的基本组成单元,该智能体由五元组Agent=
(1)State={Normal,Abnormal}表示Agent的可选状态集合,由无人机电量、无人机是否处于正常工作中等因素来确定。如果电量过低或无人机工作异常,State为Abnormal,表示无人机不可使用。
(2)Position表示Agent的位置,即无人机在地理坐标系下的三维坐标。
(3)PosInfo表示Agent所在位置的信号强度信息。
(4)NeighborInfo表示其他Agent的相关信息。Agent通过机间通信获取其他Agent所在位置的信号强度,并将其以列表形式保存在NeighborInfo中。
(5)Action表示Agent可执行活动的集合,包括移动(Move)、悬停(Standby)、返回基地(Return),即Action={Move,Standby,Return}。
2.2 面向多无人机系统的多智能体模型
将无人机抽象为智能体,则具有通信能力的无人机群可抽象为多智能体,并建立多智能体模型。通过智能体对环境的感知理解,采用多智能体系统自组织方法实现智能体之间的相互协调与协作,从而实现无人机群整体行为的一致性。无人机群的多智能体模型可定位为一个四元组:UAV-MAS=
(1)Agents={agent1,...,agentn}表示无人机群中有n个无人机,被抽象为n个智能体。
(2)TargetPos表示目标点被定位后的坐标值,如果还未定位完成,该值为空。
(3)MissionState表示是否已完成对目标点的定位。该值初始为False,表示定位还未完成;定位完成后该值为True,并将目标定位结果赋值给TargetPos。
(4)Mechanism表示该无人机群采用何种方法形成定位所需的空间结构。
3 面向空间结构形成的自组织协同方法
3.1 多无人机自组织协同方法
在初始条件下,各无人机到目标点距离不等,但无人机之间通过机间通信链路进行的信息交互使得无人机彼此知道其所在位置的信号强度。无人机群通过自组织方式减小不同无人机到目标点距离的差值,如图3 所示。

Fig.3 Schematic diagram of UAVs position movement图3 无人机群位置移动示意图
多无人机自组织协同方法流程如图4 所示。
要使各无人机到目标点距离相等,即通过移动无人机使得各无人机所在位置的信号强度相近,信号强度相差最大的二者信号强度之差小于可接受的误差阈值。当该条件不被满足时,各无人机选择已知的最大信号强度与最小信号强度平均值作为最佳信号强度,自主选择其最佳飞行方向,使得其信号强度变化逐渐接近最佳信号强度。如此,最大信号强度会不断减小,最小信号强度不断增大,最终达到一个平衡的临界值,使得所有无人机的信号强度相近,即到目标点的距离近似相等,从而满足目标定位任务的空间结构要求。
3.2 三边极差收敛算法
取无人机群中各无人机及目标点的初始位置为任务区域Domain中的点,任务执行时刻表示为T={t0,t1,…,ti,…,tn},0 ≤i≤n。基于多智能体的多无人机系统模型可抽象为UAV-MAS=

Fig.4 Process of multi-UAV self-organization collaboration method图4 多无人机自组织协同方法流程
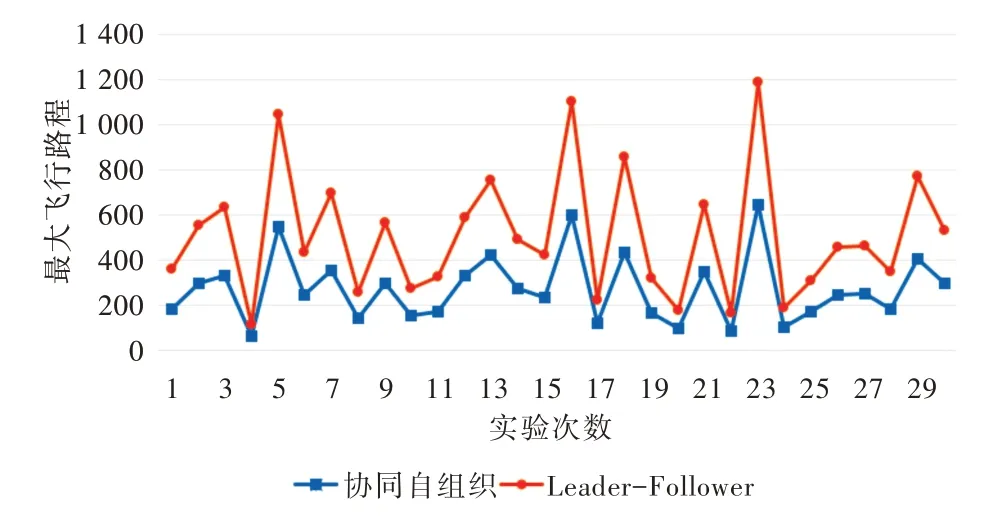
记agentk在ti时刻测得的信号强度为,任务要求信号强度极差不能超过deltas,则任务条件为max()-min() 算法1 三边极差收敛算法 输入:无人机群初始位置,如无人机agentk的初始位置为;无人机agentk在ti时刻测得的信号强度为。 输出:满足信号强度极差小于误差要求阈值时的无人机群位置,如无人机agentk的最终位置为(agtkx,agtky,agtkz)。 本文通过模拟实验验证所提出的自组织协同方法应用于无人机群形成特定空间结构过程的高效性,即验证该方法是否能形成符合条件的特定空间结构并优于其他方法。 本文设计模拟环境为1000m × 1000m × 1000m 的 未知区域。其中,无人机数量为3 架,随机对其位置进行初始化。为了模拟环境的不确定性,目标位置也是随机生成。如图5 所示,图中无人机初始位置分别为圆形、正方形、三角形所在位置,目标初始位置为五角星所在位置。 无人机群通过机间通信,使得所有无人机都能获取各无人机所在位置的信号强度。采用自组织协同方法,最终使3 个无人机到目标点的信号强度相近,即形成3 个无人机到目标点距离近似相等的空间结构。将无人机群运动轨迹从开始到结束由浅至深进行绘制,如图6 所示。 Fig.5 Initial position of target and UAVs图5 目标及无人机群初始位置 Fig.6 Movement trajectory of UAVs图6 无人机群运动轨迹 无人机在飞行过程中以匀速运动,以多无人机协同过程中的单个无人机飞行路程为横坐标,无人机所在位置的信号强度为纵坐标,绘制无人机群信号强度变化图,如图7所示。由图7 可知,无人机间的信号强度差距越来越小,最终3 个无人机的信号强度相近,形成了到目标点距离近似相等的空间结构。 Fig.7 Variation of signal intensity of UAVs图7 无人机群信号强度变化 本文对无人机自组织协同方法进行30 次模拟实验,统计每次模拟实验中无人机群形成空间结构所需的单个无人机飞行最大路程。同样的,对于每次模拟实验,也采用已有的成熟编队控制方法,即Leader-Follower 方法,将信号强度最大和最小的两架无人机作为Follower,剩下一架无人机作为Leader、Follower 朝与Leader 信号强度相近的方向靠近,使得无人机间的信号强度差值逐渐减小。图8 展示了两种方法在每次实验中需要的最大飞行路程。 Fig.8 Comparison of the maximum flight distance required by Leader-Follower and self-organizing collaborative methods图8 Leader-Follower 与自组织协同方法所需的最大飞行路程对比 由图8 可得,本文提出的自组织协同方法可更快地形成所需的空间结构,提高了任务完成效率。自组织协同方法平均需要的路程为235.1m,Leader-Follower 方法平均需要的路程为271.3m,相比之下自组织协同方法减少了13.34%的飞行路程。结果表明,自组织协同方法有效提升了空间结构形成效率。 无人机群可抽象为一个发散式的多智能体系统,应用基于多智能体的自组织协同方法,各无人机通过机间通信链路进行信息交互,获取其他无人机所在位置的信号强度,并根据三边极差收敛算法自主选择最佳飞行方向,快速形成各无人机到目标点距离相等的空间结构。经过模拟实验验证,该算法相比Leader-Follower 方法,最大飞行路程减少了13.34%,有效提升了空间结构形成效率。 下一步将在该方法基础上继续进行扩展研究,包括以下几个研究方向:①将无人机群自组织协同方法应用于真实无人机及实际环境中,验证自组织协同方法的高效性;②研究当某架无人机发生故障时,如何协调其他可用无人机配合继续完成任务;③研究如何使用多无人机同时协同对多个目标进行定位。
4 实验与分析
4.1 实验设计


4.2 结果分析

5 结语
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
科学大众(2020年23期)2021-01-18
阿来研究(2020年1期)2020-10-28
汽车观察(2019年2期)2019-03-15
现代测绘(2018年1期)2018-03-06
测绘通报(2016年9期)2016-12-15
中国卫生(2016年5期)2016-11-12
新世纪水泥导报(2016年1期)2016-07-01
中央社会主义学院学报(2016年2期)2016-05-04
计算机工程(2015年8期)2015-07-03
