大型网状天线展开指向精度测量方法研究①
2021-06-24 13:04蒲理华刘博学马小飞
空间电子技术 2021年2期
蒲理华,刘博学,马小飞
(中国空间技术研究院西安分院,西安 710000)
0 引言
大型网状可展开天线是卫星载荷重要的组成部分,是新一代航天器的关键产品,其在轨波束指向精度主要由天线安装精度、展开精度、热变形、天线姿态控制精度和卫星姿轨控精度等综合决定。其中,展开指向精度测量是天线研制工作中的一项重要内容,决定着后续天线安装过程和在轨姿态控制过程中的调整补偿策略,进一步影响着天线收发信息的准确性和可靠性。与传统的固面展开天线相比,大型网状天线具有大尺寸、质轻,高收纳比,多级展开、柔性非固定型面及高指向精度的特点,这些因素导致了大型网状天线展开指向精度在地面测试过程中难度较大,并且对于此类天线的展开指向精度测量又没有成熟可借鉴的先例[1-4],因此本文的研究意义重大。大型网状天线主要由展开臂、大型可展开反射器、可展开馈源阵三个子部件组成,天线的展开指向精度为展开臂、反射器、馈源阵三部件集成后的综合展开指向精度,但由于在地面无法实现天线完全展开状态试验验证,因此无法对天线展开指向精度进行直接测量,基于此,本文提出了一种通过将天线各组成子部件统一到卫星坐标系下进行展开指向单独测量进而综合分析天线综合展开指向精度的新的间接测量方法,最终实现了大型网状天线展开指向精度的地面测量。
1 天线展开指向精度影响因素分析
大型网状天线在卫星上展开后如图1所示,从天线结构特性考虑,影响天线综合展开指向精度指标的因素主要有展开臂展开指向误差、反射器展开指向误差和馈源阵展开指向误差等。
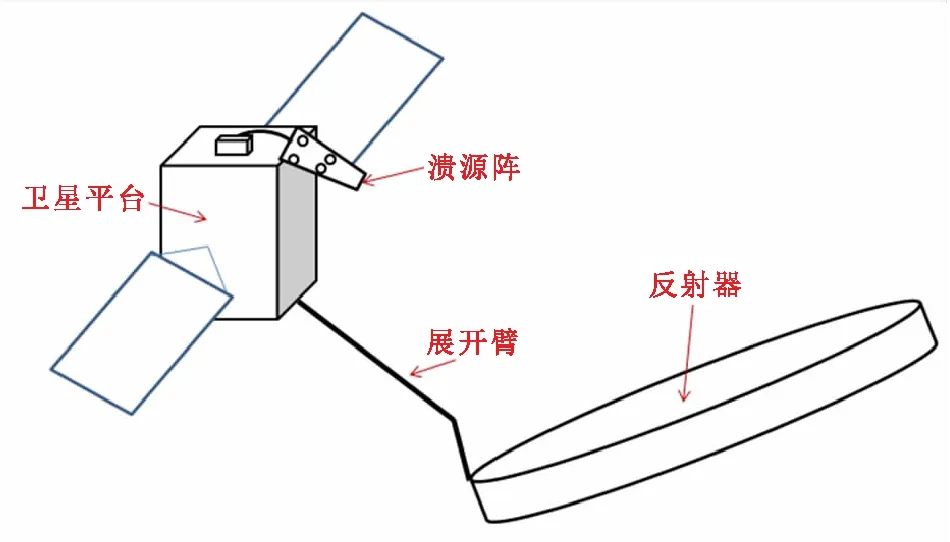
图1 大型网状天线星上展开示意图
1.1 展开臂展开指向误差
天线展开过程中,展开臂在根部展开关节、臂间展开关节等作用下多级展开到位,带动反射器到指定展开位置,根部展开关节和臂间展开关节的展开精度决定了展开臂展开到位的精度,最终影响反射器展开指向精度。
1.2 反射器展开指向误差
展开臂展开到位后,可展开网状反射器在展开臂指定的展开位置处由收拢状态开始展开,其最终展开型面精度及位置偏差直接反映反射器的指向精度误差。
1.3 馈源阵展开指向误差
馈源阵由收拢锁定状态相对于馈源阵支撑组件进行展开到位,馈源阵的展开到位的锁定误差将影响馈源阵相对于反射器的指向精度,进而引起天线实际指向误差。
2 天线展开指向精度测量分析
虽然在地面无法实现天线完全展开状态下的综合指向精度测量,但是通过对其影响因素的分析,可以利用现有装配条件分别针对各个影响因素实现高精度测量。因此,本文在识别天线展开指向误差传播途径的基础上,创新性地提出基于反射器、展开臂和馈源阵三大部件展开指向精度分别直接测量进而分析获得大型网状天线综合展开指向精度技术,间接实现天线完全展开后指向精度的精确测量。天线展开指向误差传播途径如图2所示。
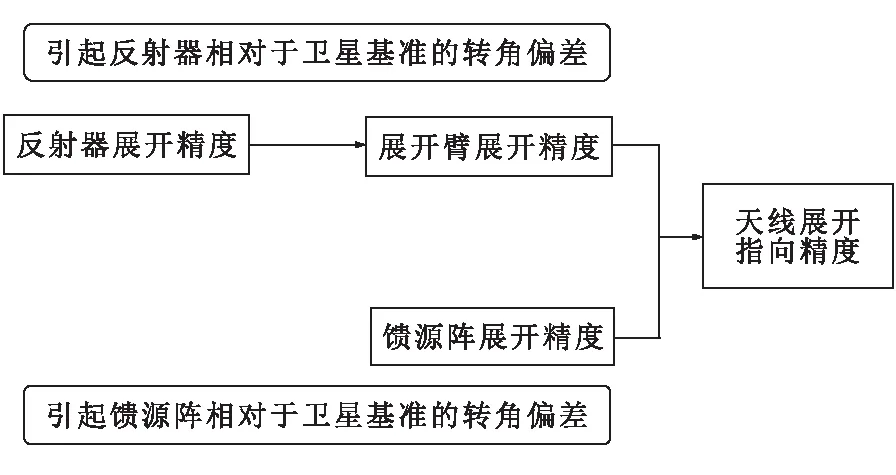
图2 天线展开指向误差传播途径
2.1 展开臂展开指向精度测量
展开臂在零重力卸载[5]状态下进行展开指向精度测试,展开到位后,通过测量根部基准孔建立卫星坐标系,在卫星坐标系下测量臂间关节基准孔,进一步通过臂间关节基准孔测量值与理论值进行公共点转换得出展开臂展开精度。
但是由于展开臂根部和臂间关节部位基准孔分布法兰面尺寸较小,且整个展开臂展开后尺寸可达6 m~7 m,基于展开臂以上的结构特点,如果采用上述一套系统同时直接测量展开臂根部和臂间基准孔获得展开精度的方式,不可避免的引入较大的基准测量误差,进而影响最终指向精度的测量结果。为了进一步提高展开臂展开指向测量的精度,需要合理设置测试基准及坐标系。本文采用基准转移的方式,在展开臂根部和臂间分别安装基准立方镜[6],标定建立根部立方镜坐标系与根部基准孔确定的卫星坐标系的关系,及臂间立方镜坐标系与臂间基准孔确定的臂间坐标系的关系。展开臂展开指向精度测量时,基于经纬仪测量系统高精度自准直测量和角度测量互瞄传递原理,使用经纬仪测量系统对展开臂臂间关节立方镜及展开臂根部立方镜进行准直测量,获得各自立方镜坐标系,进一步通过准直经纬仪间的互瞄角度计算展开臂臂间关节立方镜坐标系与展开臂根部立方镜坐标系的关系,根据前期标定的根部立方镜坐标系与卫星坐标系的关系及臂间关节立方镜与臂间坐标系的关系,进一步获得展开臂在卫星坐标系下的展开角度,通过其展开角度实测值与理论设计值的对比,就可以计算出展开臂的展开指向误差(ΔRxl,ΔRyl,ΔRzl)[7]。
基准镜坐标系通过经纬仪自准直建立。本文利用两台调平后的经纬仪T1和T2对展开臂根部立方镜Z轴面和X轴面分别进行准直测量获得立方镜坐标系的Z轴向和X轴向,并通过互瞄定向建立交会测量系统,从而在经纬仪测量坐标系下建立起根部立方镜坐标系。同时利用另外两台调平后的经纬仪T3和T4对展开臂关节立方镜Z轴面和X轴面分别进行准直,并通过经纬仪T3与T1互瞄进行角度传递,进一步在经纬仪测量坐标系下建立起关节立方镜坐标系,进而获得展开臂臂间关节立方镜坐标系与展开臂根部立方镜坐标系的关系,在立方镜标定的基础上计算展开臂的展开指向角度。
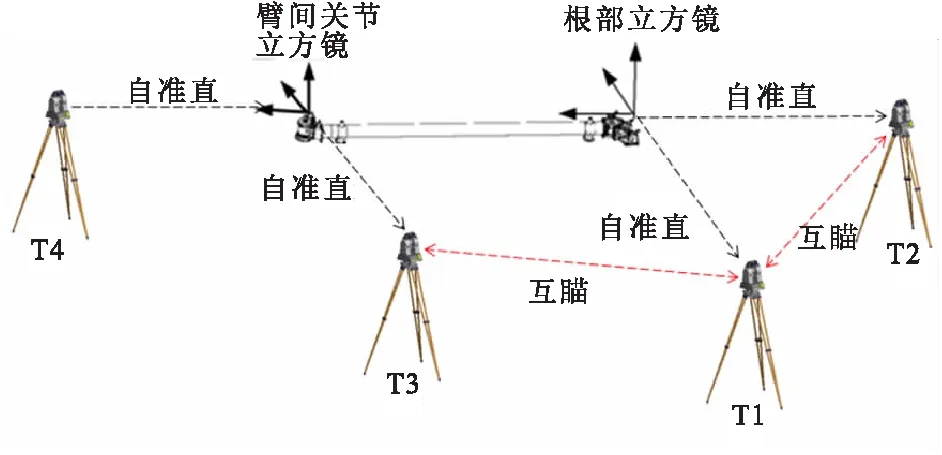
图3 展开臂展开指向精度测量示意图
2.2 反射器展开指向精度测量
反射器展开指向精度由反射器展开后型面精度误差决定,其展开指向精度在反射器卸载状态[8-10]完全展开到位后进行测量,通过测量与展开臂关节连接的转接臂基准孔建立卫星坐标系,在卫星坐标系下测量反射器型面数据,进一步通过型面测量数据与反射面理论模型进行最佳拟合,计算最优型面精度,最终获得的拟合参数即为反射器展开型面指向误差(ΔRxs,ΔRys,ΔRzs)。
由于转接臂基准孔安装面尺寸较小,直接测量基准孔建立卫星坐标系的方法误差较大,因此需要将安装接口面通过基准转换进行放大,使用转换后的基准进行卫星坐标系的测量。针对大尺寸可展开网状反射器的型面指向测量,采用摄影测量方式[11-13],因此反射器转接臂处基准孔通过设计的基准延伸工装转移标定至数个空间分布的摄影靶标上,反射器展开指向精度测量时获得反射器表面标志点坐标和转换后的基准点坐标,通过基准点测量值与理论标定值的公共点转换建立卫星坐标系,后由在该卫星坐标系下的反射面标志点的测量值与理论模型拟合分析计算获得反射器展开指向精度。
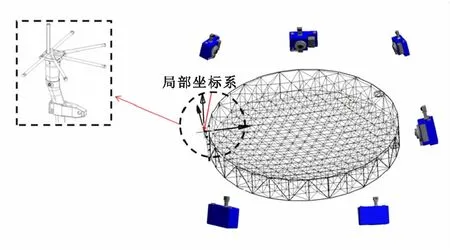
图4 反射器展开指向精度测量示意图
反射器展开指向精度测试时卫星坐标系的建立采用公共点转换法[14],利用基准延伸工装上标定基准点在摄影测量坐标系下的测量值及其在卫星坐标系下的理论值的三维坐标值的不同,确定摄影测量坐标系与卫星坐标系之间的转换参数,进而根据转换参数将直接获得的摄影测量坐标系下的型面测量数据转换至卫星坐标系下进行反射器展开指向精度的分析。在转换的过程中,由于公共点已与自己所在的坐标系之间的关系固定,对两组公共点,存在两个不同坐标系,因此两坐标系之间有三个平移参数和三个旋转参数,记为t=(X0,Y0,Z0,εx,εy,εz)。设公共点在摄影测量坐标系下的坐标为(X,Y,Z),在卫星坐标系下的坐标为(x,y,z),摄影测量坐标系与卫星坐标系之间的转换关系如式(1)所示,
(1)
其中:
(2)
2.3 馈源阵展开指向精度测量
馈源阵展开指向精度测量示意图如图5所示。馈源阵在零重力卸载下[5]展开,展开到位后采用经纬仪交会测量系统测试馈源阵铰链支撑结构处基准孔坐标[15],通过基准孔测量数据与其在卫星坐标系下理论值进行公共点转换建立卫星坐标系,在卫星坐标系下测试馈源阵展开部分四个锁紧孔在卫星坐标系下的值,将锁紧孔测试值与卫星坐标系下展开位置的理论值进行比较计算,获得馈源阵实际展开精度(ΔRxf,ΔRyf,ΔRzf)。馈源阵的展开指向测试直接采用多经纬仪前方交会测量系统,测量系统可以同时测量得到基准孔和锁紧孔的空间三维坐标。
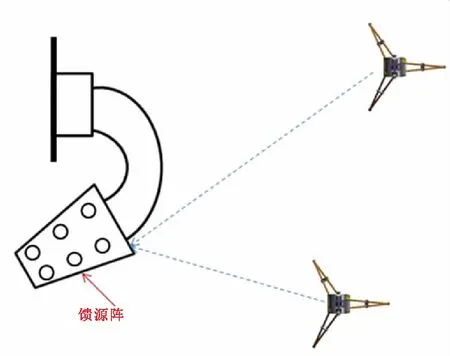
图5 馈源阵展开指向精度测量示意图
2.4 天线综合指向精度分析
将网状可展开反射器、展开臂及馈源阵,建立卫星坐标系下的指向精度系统分析模型,展开臂展开指向精度、反射器展开指向精度、馈源阵展开指向精度等三项因素最终影响大型网状天线的综合指向精度,天线综合指向精度分析结果如表1所示,最终实现了多级可展开大型网状天线展开指向精度的地面高精度测量。
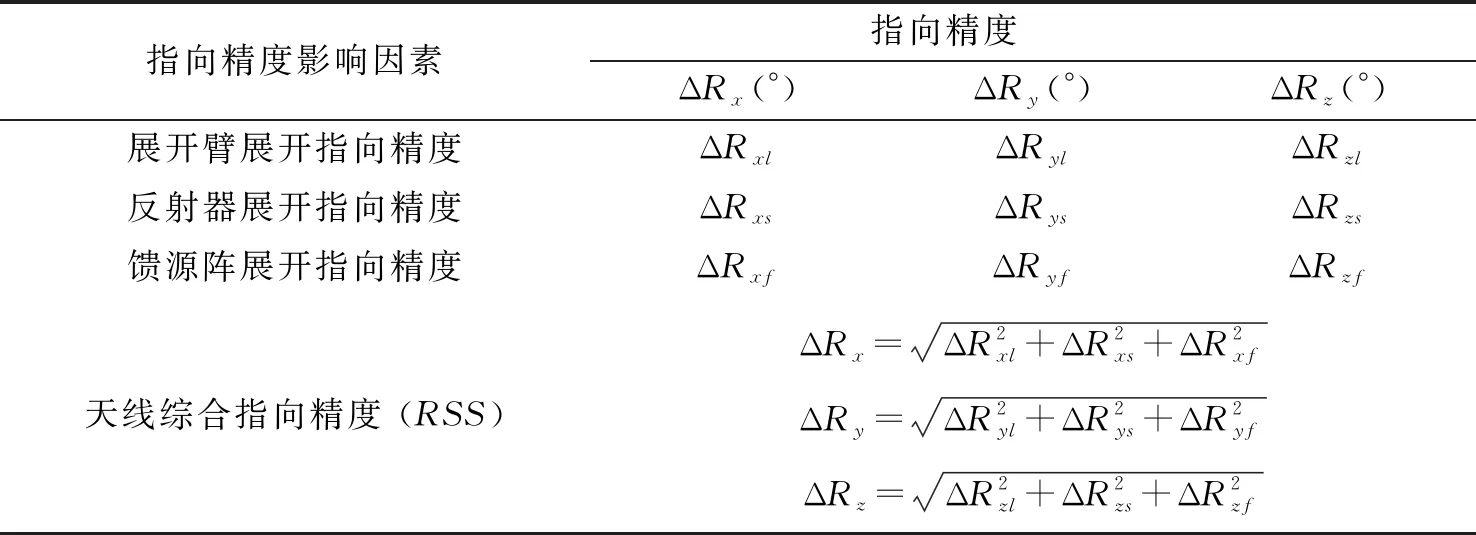
表1 天线综合指向精度分析结果
3 天线综合指向精度测量误差分析与试验验证
3.1 测量误差分析
大型网状天线展开指向的测量精度受到展开臂、反射器和馈源阵三部分展开指向测量精度的综合影响,而展开臂、反射器和馈源阵各自的展开指向测量精度取决于自身结构特点和测量仪器自身固有的测量精度,本文从上述天线结构特点和仪器固有测量误差对影响天线展开指向精度的三个因素分别进行分析。
(1)展开臂展开指向测量误差

(2)反射器展开指向测量误差
对于15 m口径网状反射器,摄影测量的理论点位误差为0.1 mm。天线反射器展开指向精度测量时通过采用摄影方式测量反射器型面数据和坐标系基准而获得最终指向精度,其引起的反射器展开指向测量误差为18″。
(3)馈源阵展开指向测量误差
经纬仪交会系统在5 m测量范围内的孔位测量误差理论上能够达到0.05 mm。馈源阵展开指向精度测量时采用经纬仪交会测量的方式,综合考虑仪器误差、馈源阵基准孔加工误差和视觉误差的影响,馈源阵展开指向测量误差为12″。

3.2 试验验证
应用本文提出的方法对于某口径15 m环形可展开天线进行地面综合展开指向精度测量,其展开臂、反射器和馈源阵展开指向精度实测结果和精度指标如表2所示。

表2 天线展开指向精度指标及实测结果
在不考虑各部件实际安装精度的条件下,该天线展开综合指向精度满足指标要求,本文提出的方法测量精度满足实际测量需求。
4 结论
本文创新性的提出基于反射器、展开臂及馈源阵等部件展开指向精度直接测量模式的天线综合指向精度间接测量方法,而且使测量精度优于0.01°,实现了大尺寸多级可展开天线展开指向精度的地面高精度测量,研究结果对后续相关类型天线的展开指向测量和分析具有重要的指导意义。
猜你喜欢
航天器环境工程(2022年1期)2022-03-11
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
好日子(下旬)(2020年6期)2020-08-04
科技传播(2019年22期)2020-01-14
科教新报(2019年16期)2019-09-10
科学导报(2019年24期)2019-09-03
福建基础教育研究(2019年6期)2019-05-28
劳动保护(2018年8期)2018-09-12
读者·校园版(2015年7期)2015-05-14