一种新的BDS-BSAR多星融合目标监测算法①
2021-06-24 13:04牛新亮雷博持
空间电子技术 2021年2期
韩 冲,牛新亮,雷博持,万 贝,井 成
(中国空间技术研究院西安分院,西安 710000)
0 引言
基于GNSS卫星照射的双基SAR(GNSS-BSAR),顾名思义就是一种新的利用双基SAR体制,以全球导航卫星美国全球定位系统(GPS),俄罗斯导航定位系统(GLONASS)、欧洲伽利略导航定位系统(Galileo)和中国北斗导航定位系统(BDS)作为发射平台,属于一种被动的双基地SAR系统。GNSS-BSAR的优势包括以下几个方面:①GNSS-BSAR系统隐蔽性更好。②GNSS-BSAR信号源丰富。③GNSS-BSAR同步性能好。④GNSS-BSAR探测更有效。⑤GNSS-BSAR成本更低、更环保。因此,开展基于GNSS-BSAR系统的研究,不仅可以在民用领域提供更加经济有效的观测手段和探测成像与定位功能,还可以在军事领域大大提高雷达的战时适用性,具有深远的研究意义。
近年来,世界各国的研究小组对GNSS-BSAR的成像能力进行了深入的研究。伯明翰大学的研究人员首先提出了基于全球导航信号的双基地合成孔径雷达(GNSS-BSAR)系统的概念,并利用全球导航卫星系统(GLONASS)进行了实验,以获得遥感成像结果[1]。他们还研究了通过联合伽利略E5信号[2]、多站采集和特征提取[3-6]提高距离分辨率的可行性,并讨论了基于GNSS-SAR相干变化检测中的空间去相关问题[7]并进行了相干变化检测实验。湖北大学研究团队研究得出了长停留时间下二维分辨率的解析公式[6]并且证明了GNSS-BSAR的高质量空间相关性[8-11],同时,利用北斗星座在不同的照明视角观测目标区域提高了GNSS-BSAR图像的空间分辨率。北京理工大学的研究团队利用北斗中地轨道(MEO)卫星进行了成像实验,以检测具有强散射系数的角反射器和转发器,同时提出了用于图像增强的重复通相干融合[12,13]。他们还提出基于导航信号的干涉SAR系统(GNSS-INSAR)的3D干涉测量算法并对中国铁路高速(CRH)铁路桥梁成像进行了实验,取得了非常理想的结果。北京航空航天大学、地理空间技术协同创新中心、谢菲尔德大学和新南威尔士大学等研究团队也在GNSS-BSAR的成像算法,同步技术、抗干扰算法等方面做出了大量的研究[14-18]。
本文提出了一种新的基于北斗GEO(BDS-BSAR)的多星融合目标监测算法,由于北斗系统中的五颗地球同步卫星(命名为DBDS C01-C05)具有长时间稳定轨迹特性,因此能够长时间相对地静止在观测地球表面,而无需考虑运动补偿,有效避免了传统基于GNSS-BSAR系统的距离单元偏移误差校正处理,降低了传统反投影算法(BPA)中插值处理的复杂度。于此同时,由于北斗GEO具有B3频点(20.46MHz)具备更宽的信号带宽,且成像系统的几何模型相对稳定,使得利用多星融合的目标监测思想,保证了距离分辨率的进一步提高。
1 BDS-BSAR系统几何构型与回波信号模型
基于BDS-BSAR的系统几何构型如图1所示,该系统分为三部分:北斗GEO卫星(GEO-1/2/3)作为发射机、接收机(R)处于地面固定站点和观测区内的点目标(P)。接收机是具有直达通道(采集右旋圆极化直达波信号)和反射通道(采集左旋圆极化导航信号经观测区域的反射回波信号)的雷达接收机。
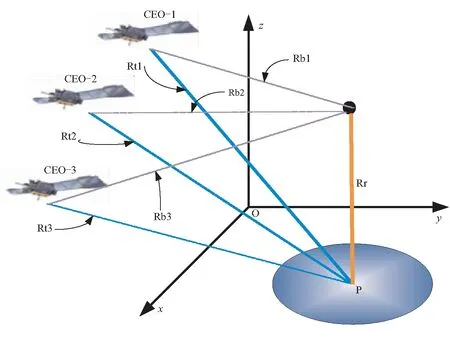
图1 BDS-GEO-BSAR系统几何构型
系统的空间坐标系为观测区域所在的大地坐标,其中X、Y、Z为ENU坐标系的坐标轴。北斗导航卫星的直达信号从GEO卫星分别经过(Rb1、Rb2、Rb3)路径到达到接收机(R);反射信号则是由GEO 卫星首先经过(Rt1、Rt2、Rt3)路径到点目标P(xTa,yTa,zTa),然后以RCS(雷达散射截面积)为σ经过Rr路径到达接收机。
假定发射机1的坐标表示为(xT(u),yT(u),zT(u)),则此时的发射-接收的基线如式(1)所示:
(1)
考虑到图像场景中点目标的坐标为(xTa,yTa,zTa),我们得到瞬时发射-目标的距离RT(u)和接收-目标的距离RR为:
(2)
(3)
由于GNSS信号的一般形式是:
Y(t)=P(t)MP(t)cos(ωct+φ)+D(t)MD(t)sin(ωct+φ)
(4)
接收机的直达信道(HC)记录直达信号与其时延和相位,反射信道(RC)记录目标回波信号与从发射到目标到接收的时延。HC和RC经过正交解调得到:
(6)
(7)
其中,pO是发射信号主码,c是光速,λ是信号波长。
从(6)和(7)可以看出,HC和RC的误差相同。这是因为它们在同一个接收器上是相同的信道,并且两个信道的振荡器是共同的。因此,由于RT(u)+RR和RB(u)之间的距离差相对较小,它们具有相同的接收误差和近似相等的大气误差。因此,可以使用HC同步期间跟踪的误差来补偿RC中的误差。
2 基于(BDS-BSAR)的多星融合目标监测算法
对于固定接收机和固定方位和仰角的北斗GEO卫星,在观测区域内一定数量的网格具有相同的路径延迟。由于GEO卫星在给定的路径延迟RD0的网格将在成像区域形成一条弧,此弧称为距离等延迟弧。因此,本文将利用三颗北斗GEO卫星,首先考虑到卫星C01直接天线和反射天线分别接收直接和反射信号。信号跟踪模块用于提取直接信号中的码相、载波相位和导航信息。然后利用码相位和载波相位等参数对反射信号进行距离压缩,得到相关曲线,并利用导航信息对反射信号进行解调,从而延长了相关曲线的相干积累时间。然后将相关曲线反投影到成像区域,得到距离相等的延迟弧。对于C02/C03,执行相同的程序。通过多星等延迟弧的交点可以得到一个尖峰,从而可以确定目标。
基于(BDS-BSAR)的多星融合目标监测算法的系统处理流程框图如图2所示:
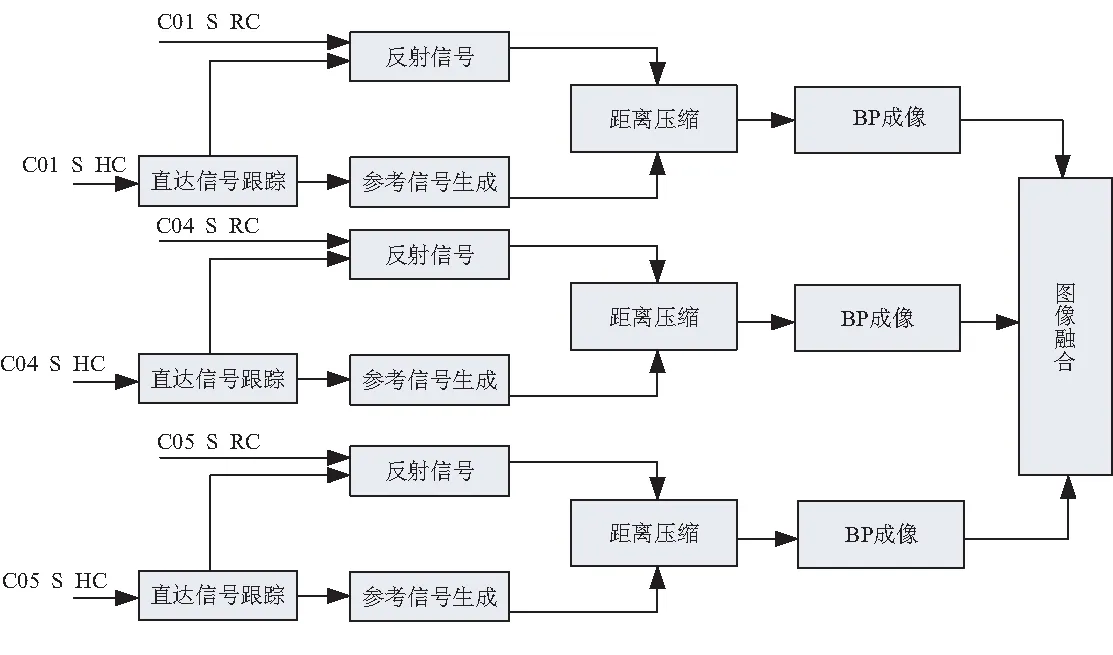
图2 基于BDS-BSAR的算法流程图
由图2可知,分别对三颗卫星首先进行直达信号的捕获跟踪,并生成本地参考信号作为反射信号处理的预处理过程,然后利用反射信号与本地生成信号进行二维接收数据的距离压缩,从而得到单颗卫星的距离成像结果。通过对三幅距离成像数据结果叠加从而可以最终得到点目标的多星干涉后的图像结果。
根据公式(6)和(7)可以观察到,所有的接收和大气误差都是随时间缓慢而变化的,但它们不是t的直接函数。由此可将直达信号跟踪结果直接反馈到反射信号通道,并根据直达信号相位和多普勒信息重构本地参考信号,然后将两路信号经过距离压缩,由于多星融合干涉此时无需进行插值处理就可以得到相关结果。
由广义模糊度函数(GAF)的定义在距离和方位维度上的3 dB宽度分别为距离分辨率和方位分辨率。考虑到地面静止接收机接收来自GNSS发射机的信号并由一个静止点目标反射,该系统的二维双站分辨单元可以从GAF中推导出来。在窄带信号和窄合成孔径假设中,GAF,X(A,B)由两个归一化函数p(·)和mA(·)的乘积给出。p(·)是测距信号的匹配滤波器输出,mA(·)是归一化接收信号幅度图的逆变换。因此,信号的模糊度函数可以写成:
(8)

(9)
其中Rd(x,y)是发射-目标-接收的距离,Λ()为BP成像区域。
3 算法仿真分析与结果
为了验证算法的有效性,利用MATLAB进行数值仿真。设定仿真参数为:北斗GEO卫星作为发射机,观测区域选择1 000×1 000m2,接收机为观测区域坐标系中心点高度为1 000m,其坐标为(0,0,1 000);点目标的坐标为(500,500,0,),成像网格选择1×1 m的单元对成像区域进行划分。
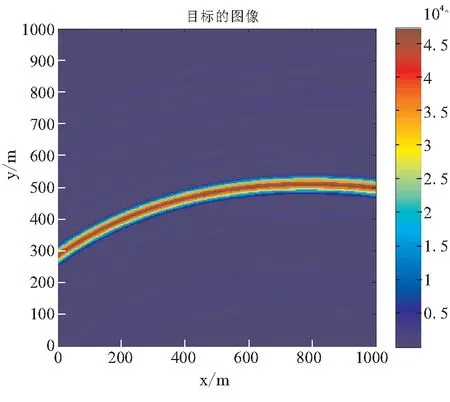
图3 单颗GEO卫星成像结果
如图3所示,为单颗GEO 卫星的成像效果图,通过图示可以看到单星等距离弧的效果。由于单星的距离向分辨率是由双站角和信号带宽决定的,北斗B3频点信号得到的距离向分辨率是30 m,符合双基SAR分辨率的预期。
图4(a)给出了基于三颗GEO卫星的融合图像结果,通过仿真结果可以清楚看到目标点处具有更高的能量。图4(b)给出了局部放大的效果,可以看出该算法的目标分辨率约在40×100 m2。

(a)BDS-GEO-BSAR成像结果 (b)局部放大效果
4 结论与展望
本文介绍了一种新的基于北斗GEO(BDS-BSAR)的多星融合目标监测算法,由于北斗系统中的五颗地球同步卫星(命名为DBDS C01-C05)具有长时间稳定轨迹特性,因此能够长时间相对地静止在观测地球表面,而无需考虑运动补偿,有效避免了传统基于GNSS-BSAR系统的距离单元偏移误差校正处理,降低了传统反投影算法(BPA)中插值处理的复杂度。于此同时,由于北斗GEO具有B3频点(20.46MHz)具备更宽的信号带宽,且成像系统的几何模型相对稳定,使得利用多星融合的目标监测思想,保证了距离分辨率的进一步提高。通过仿真结果验证了算法在目标检测的可行性与有效性。后续研究将集中在成像分辨率提升和实际场景试验以及对虚假目标的识别研究上。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
军民两用技术与产品(2022年7期)2022-08-06
小哥白尼(神奇星球)(2022年3期)2022-06-06
导航定位学报(2022年1期)2022-02-17
家庭影院技术(2020年2期)2020-03-25
中国电气工程学报(2019年18期)2019-10-21
当代陕西(2019年18期)2019-10-17
太空探索(2016年12期)2016-07-18
太空探索(2016年3期)2016-07-12
CHIP新电脑(2016年3期)2016-03-10