
三维激光扫描仪在矿山复杂地形测量中的应用
2021-06-23 10:08陆万杰董英平万世斌欧东张郁山逯登栋
世界有色金属 2021年21期
陆万杰,董英平,万世斌,欧东,张郁山,逯登栋
(青海黄河矿业有限责任公司,青海 西宁 810000)
在矿产资源开采过程中,使用的传统测量仪器有GPSRTK和全站仪等,都是单点测量的方式,这样的测量方式,测量精度受人为因素的影响较大。通过调研,各矿山的方量验收的误差取2%作为经验值,即月验收累计方量和年度复核方量的差值占月验收累计方量的2%,比如开采1000万方矿石,可能会流失20万方。为了实现矿山精细化管理,减少因为测量误差造成资源贫化等问题,夏日哈木矿山引进了三维激光扫描仪来控制方量验收的误差,并且可为实现智慧化矿山从二维平台转到三维实时动态展示提供三维实景模型。
三维激光扫描技术是20世纪90年代中期开始出现的一项高新技术,是继GPS空间定位系统之后又一项测绘技术新突破。它通过高速激光扫描测量的方法,大面积、高分辨率地快速获取被测对象表面的三维坐标数据。可以快速、大量的采集空间点位信息,为快速建立物体的三维影像模型提供了一种全新的技术手段。由于其具有快速性,不接触性,实时、动态、主动性,高密度、高精度,数字化、自动化等特性,其在矿山的应用推广非常有必要的。
为了确保三维激光扫描仪能够在矿山顺利投用,需要对扫描仪进行精度验证,保证数据的可靠性。本文首先分析了三维激光扫描仪的工作原理及流程,再利用三维激光扫描仪对厂区内一处山包进行测量,并建立三维模型,将模型对照实地进行分析;然后从模型中提取高程点,利用莱卡全站仪对提取高程点进行精度验证,为三维激光扫描仪在矿区应用提供依据。
1 激光扫描测量技术的原理
该扫描仪采用的是脉冲式激光测距的原理,利用非接触式高速激光测量,以点云的形式测得被测物体表面矩阵式的三维数据。硬件设施主要包括扫描仪主机(脉冲式激光器、时间计数器、马达控制系统、测量型望远镜、内置数码相机)、电源及外业测量平板电脑。

图1 三维激光扫描仪主机

图2 外业测量手簿
该扫描仪仪器主要参数见表1
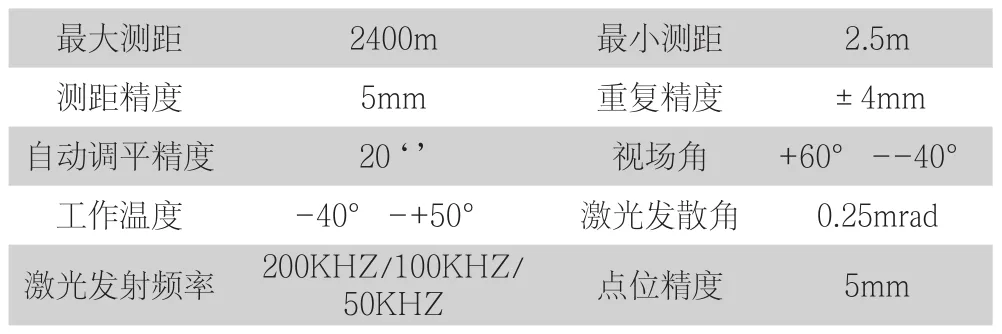
表1 三维激光扫描仪主要参数
其工作原理主要有测距、测角两个方面。
(1)脉冲式测距:通过记录发射和接收脉冲信号的时间差ΔT来计算出被测物体的距离S(光速为C)。
(2)测角:该扫描仪工作时进行水平和垂直方向扫描,通过时钟控制编码器测量激光脉冲横向扫描角度观测值α和纵向扫描角度观测值β。
测得被测物体的距离S、激光脉冲横向扫描角度观测值α和纵向扫描角度观测值β后,再利用极坐标系与笛卡尔坐标系之间的相互转换关系计算出目标点的X,Y,Z坐标。最终成千上亿带有三维坐标和反射率信息的点在电脑上呈现出真实尺寸的环境信息。

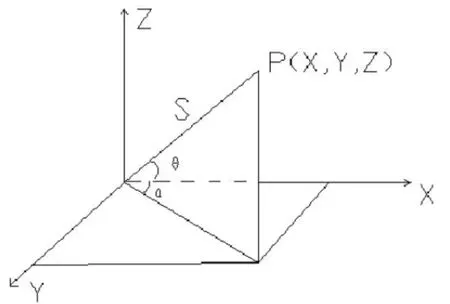
图3 目标点三维坐标计算图
2 三维激光扫描仪的测量流程
利用三维激光扫描仪进行地形测量主要分为外业点云数据采集和内业点云数据处理,具体工作流程如图4。
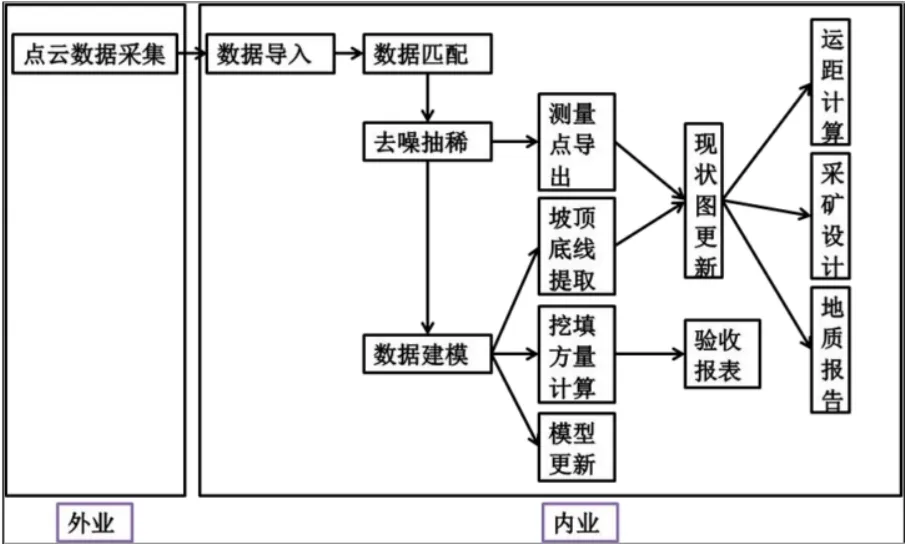
图4 测量流程图
(1)外业点云数据采集:点云数据采集时包括测站点选取、控制测量、点云采集三步。测站点选取时根据被测地形的实际情况均匀分布,对于复杂地形可多设站,考虑测站之间的衔接,避免出现扫描死角,尽可能提高扫描覆盖率,并且站点不能设置太远,必须在扫描仪的有效扫描距离内,还必须设置合理的站数,站数如果选择少了,就会出现扫描盲区,拼接后的数据有黑洞,如果站数过多,就会降低扫描效率,增加扫描时间,也会积累拼接的误差,所以应该根据实际情况,设置尽量少且合理的站数,获得最佳的扫描结果。测站点选定后可由GPS-RTK测得测站点绝对坐标,再通过后视定向原理为仪器设定好坐标系,后视点选取时尽量选取在地势较高的位置,做到尽可能多的测站用到同一后视点,以防止后视坐标产生的误差影响后期数据拼接。待三维激光扫描仪在矿山正式投用后可以考虑在较高位置设置永久后视点,来减少后视点的误差对测量精度的影响。最后在手簿中设置气压、温度、天气、光照强度等参数,保证激光测距的精度,最后再由仪器进行360°旋转获取点云数据。
(2)点云数据处理:点云数据处理包括数据匹配、去噪抽稀和数据建模。将数据导入配置的数据处理软件中,分析扫描数据,查看分层情况,如出现数据分层,可通过配准功能将分层数据进行匹配。去噪抽稀是将扫描过程中现场存在的人员、设备、粉尘等噪点过滤,主要的方式有地形过滤、按最小间隔过滤、特征点过滤、近程过滤等。数据建模是通过大量的点云数据形成数字地形模型,实现该功能的主要方式有地形三角网、消峰、孔洞填充等。
3 三维激光扫描技术的特点
三维激光扫描技术是一种利用激光测距的原理,通过扫描得到三维立体空间数据的非接触式主动测量系统。相对于传统的单点测量系统,三维激光扫描仪可以对被测物体的面进行测量,因此其在复杂的空间环境中的表现力更强。测量后的点云数据可以直接导入到计算机软件中,从而快速获得被测物体的三维模型,进行点、线、面和量的数据提取。三维激光扫描技术有如下特点:
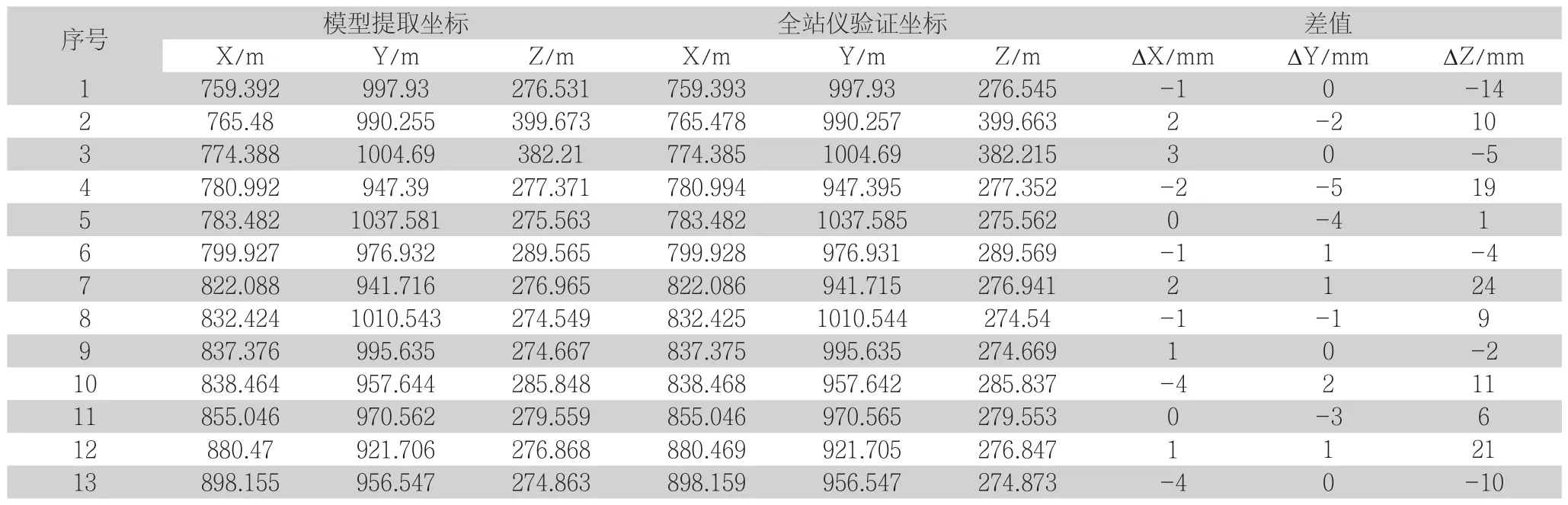
表2 全站仪精度验证结果表
(1)精确度高。传统的摄像测量是根据像控点的坐标来建立模型上个点的坐标,因此点位测量精度与像控点的精度和位置密切相关。三维激光扫描仪获得的点云精度一般高于摄影测量中的解析点,且精度分布均匀。此外,三维激光扫描技术还可以避免表面近似误差的问题。为实景三维模型的建立提供了更加精细和可靠的三维数据,推动真三维实景。
(2)环境影响因素小。传统的测量方法考虑操作性和测得数据真实性,一般不能在夜晚进行作业,而三维激光扫描技术获取扫描物的点云数据是通过接受自身发射的激光回波信号,因此不受时间和空间的约束,延长了测量时间和扩大了测量领域。
(3)数据覆盖率高。对于传统的测量方法和仪器,如全站仪、GPS-RTK等,在测量地形时,只能测量地形特征点,该类方法在地势险峻地区和地形起伏较大的区域勘测阻力较大,难以保证工作的全面覆盖,三维激光扫描技术通过采集高密度、高分辨率的海量点云数据解决了这一难题,三维激光扫描仪的脉冲激光在数秒内可以采集成千上万个点,这使我们突破了单点模式,可以获得更多的物体空间信息,在兼顾测绘精度要求的同时,快速、高效地解决测绘过程中存在的边界不客观、不符合实际情况等问题。
(4)非接触式测量。除了倾斜摄影的测量方式,其他传统的测量方法都必须靠近被测物体,甚至必须接触到被测物体才能够进行测量,但三维激光扫描技术利用激光测距技术,可在2KM外采集物体表面的三维信息数据。这种非接触扫描目标的测量方法能够测量有潜在安全风险、人员无法接近的环境,在安全和经济方面发挥重要作用。
(5)数据实用性和兼容性较好。矿山生生产活动本身就是在一个三维动态的空间环境上进行的,通过三维激光扫描仪进行外业数据采集后,生成的数字高程模型,可以将矿山的储量计算、采矿设计、计划编制、生产管理等活动从二维空间转变到三维空间模型上,相比通过平面图、剖面图进行管理具有简单、直观的效果。并且可根据需求进行点、线、面操作,生成不同部位、不同比例尺的图件,输出成果能与南方CASS、ArcGIS、Dimine等软件相结合处理。
4 测量实验
本次实验在厂区选择一处山包进行扫描测量,利用莱卡GPS-RTK获取测站点坐标,控制点采用厂区内四等平面控制网。测量前先对山包整体情况进行查看,选择大致的测站点位置,再按测量流程对山包进行测量,扫描完成后生成模型,和现场拍摄的照片进行对比,大致检查生成模型的准确性。
如图5、图6,扫描所得模型完全符合现场实际情况,展现了山包的小沟壑和纹理特征,测量细节表现力极强,由此可得,三维激光扫描仪尤其在对复杂地形的测量具有很大优势。另外扫描时不仅测量了三维坐标信息,同时采集了被测物体的影像信息,可满足使用者的不同需求。
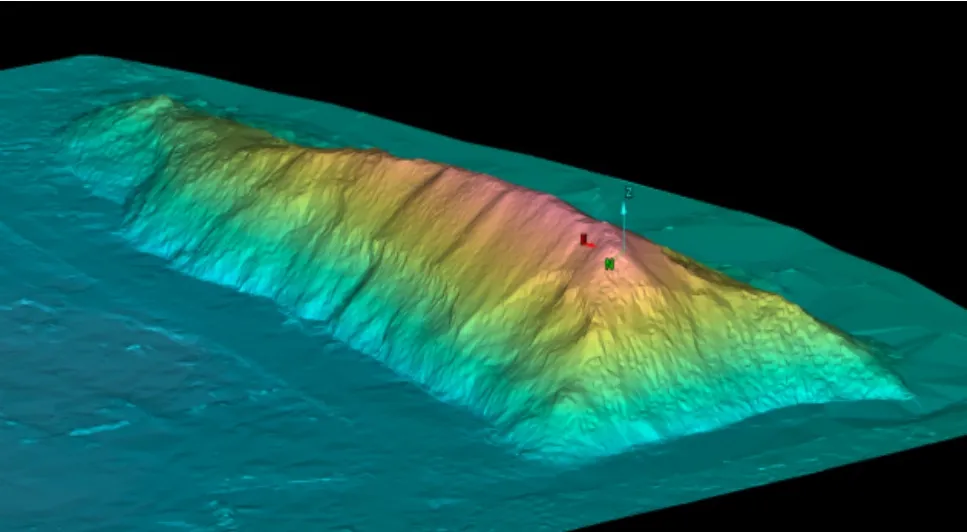
图5 建成的模型

图6 现场实际照片
5 利用全站仪精度验证
为验证扫描仪测得模型的准确性和可靠性,依据《三维地理信息模型数据产品规范》(CH/T 9015—2012),本文引入中误差,通过从扫描的模型中提取13个点,利用莱卡全站仪进行精度验证。计算公式为:

式中,Mz为高程中误差;Δ为检测较差;n为检验点总数。
在相同控制网基准下,利用莱卡全站仪对模型中提取的坐标进行放样,并测得放样点的高程,测得结果如表2。
经计算,z方向检测较差最大值为24mm,最小值为-14mm,平均值为8.2mm,中误差为12mm;现场分析原因是山包质地较软,利用棱镜测量时有下陷的可能,总体分析三维激光扫描仪测量所得的模型,模型成果满足1:500地籍测图精度要求。
6 结论
通过莱卡全站仪对三维激光扫描仪测得的三维模型进行精度验证,三维激光扫描仪用于地形测量满足地形测量的精度要求,并且扫描仪在地形测量是可不受时间、空间限制,随时获取目标物体表面的三维信息,尤其在复杂地形测量方面,扫描仪可以真实反应出地表情况,能够将地形的每一处小沟壑进行测量,真正做到了实景复制,为采出的矿量提供了更加精确的数据。三维激光扫描仪在矿山投用后将在矿山规划设计、建设生产、矿山资源储量管理方面发挥重要作用。
随着测绘技术的不断更新,各种生产活动所需要的基础数据也从抽象到真实,从静态到时序,从靠人理解到人机兼容理解,从平面到立体,从按要素、分尺度到按实体、分精度,从陆地表层到全空间的方向改变着,全新的需求体系带来了前所未有的挑战,现实问题正在倒逼产业加速升级。此外,如何高效获取更直观的三维展示成果及减少数据冗余等问题仍是今后探索的趋势。
三维激光扫描技术在矿山的应用将推动矿山生产的精细化管理。并且该技术在文物古迹保护、建筑、规划、土木工程、工厂改造、室内设计、建筑监测、交通事故处理、法律证据收集、灾害评估、船舶设计、数字城市、军事分析等领域也有了很多的尝试、应用和探索。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
新型工业化(2022年5期)2022-06-17
河北地质(2021年2期)2021-08-21
神剑(2021年3期)2021-08-14
昆钢科技(2021年2期)2021-07-22
矿产勘查(2020年1期)2020-12-28
矿产勘查(2020年7期)2020-12-25
水电站设计(2020年4期)2020-07-16
模具制造(2019年3期)2019-06-06
现代职业教育·中职中专(2016年4期)2016-10-21
