10 kV自行式高空带电作业平台结构优化设计
2021-06-17 08:38黄原辉许福忠陈庚煌苏东兴杨华锋
自动化仪表 2021年5期
黄原辉,许福忠,陈庚煌,苏东兴,杨华锋
(国网泉州供电公司,福建 泉州 362000)
0 引言
当下,国内高空作业机械制造企业发展规模已超百家,呈现出较快的发展趋势[1-2]。根据高空作业平台的特性,可将其划分为八种类型:第一,车载式高空作业平台;第二,牵引式高空作业平台;第三,自行式高空作业平台;第四,剪叉式高空作业平台;第五,铝合金式高空作业平台;第六,曲臂式高空作业平台;第七,蜘蛛式高空作业平台;第八,套缸式高空作业平台[3-10]。虽然高空作业平台众多,且各自具备不同的作业优势,但由于变电站环境较为特殊,制约了自行式高空带电作业平台在变电站中的大力推广[11-15]。因此,本文将对10 kV自行式高空带电作业平台结构进行优化设计研究,以提高该平台在变电站中的适应度,增强该平台在变电站中的应用力度。
1 组成概述
10 kV自行式高空带电作业平台主要由底盘行走系统、桅柱式升降机构、旋转式工作平台、液压系统以及电气控制系统等组成。其中,底盘行走系统以轮驱方式驱动,且具备双转向功能和导轨移动功能;桅柱式升降机构由六桅柱组结构组成,增强了平台作业时的稳定性及刚度。旋转式工作平台能够360°旋转,同时可在需要向四周延伸,提高了平台作业的范围。液压系统具备升降动力装置和支腿稳定调平装置。电气控制系统附有多种安全保护系统和控制功能,以确保电气控制系统的正常运行。此外,平台结构节点总数为1 300个,对桅柱式升降机构而言,其关键节点有155、160、170、250、300等。
2 动力学分析
本文为确保结构系统的安全性,借助ANSYS软件对10 kV自行式高空带电作业平台结构进行了动力学分析,主要分析有三:第一,模态分析,以解决结构的振型问题;第二,谐响应分析,以明确结构的响应特性;第三,瞬态动力学分析,在动力荷载作用下,以解决结构的响应问题。
2.1 模态分析
通过模态分析,能够有效获取结构或构件的固有频率合模态振型。若明确构件固有频率,便可避免外部激振频率对构件在使用期间的干扰。而得到构件模态振型后,可通过分析进一步获得构件整体弯曲和扭转刚度的部位及强度。为降低研究的难度,本文将弹性体的动力学问题转化成静力学问题。在转化期间,融入了达朗贝尔原理,得到的动力有限元基本方程如式(1)所示。
MU″+CU′+KU=F(t)
(1)
令节点荷载向量F(t)为0时,对应的自由振动方程如式(2)所示。
MU″+CU′+KU=0
(2)
式中:M为质量矩阵;C为阻尼矩阵;K为刚度矩阵;U″为节点加速度向量;U′为节点加速度向量;U为节点位移向量。
此时,令阻尼矩阵为0,便能得到模态分析的基本方程,如式(3)所示。
MU″+KU=0
(3)
通过对该方程组的求解,可得到式(4):
(4)

此时,将式(4)代入式(3),可对应得到式(5)。
(K-ω2M)A=0
(5)
式中:ω2为特征值;A为特征向量。
通过对式(5)简化求解可得到特征行列式,如式(6)所示。
|K-ω2M|=0
(6)
通过进一步求解,可得到振动频率与标准振型向量的表达式,分别如式(7)和式(8)所示。
(7)
(8)
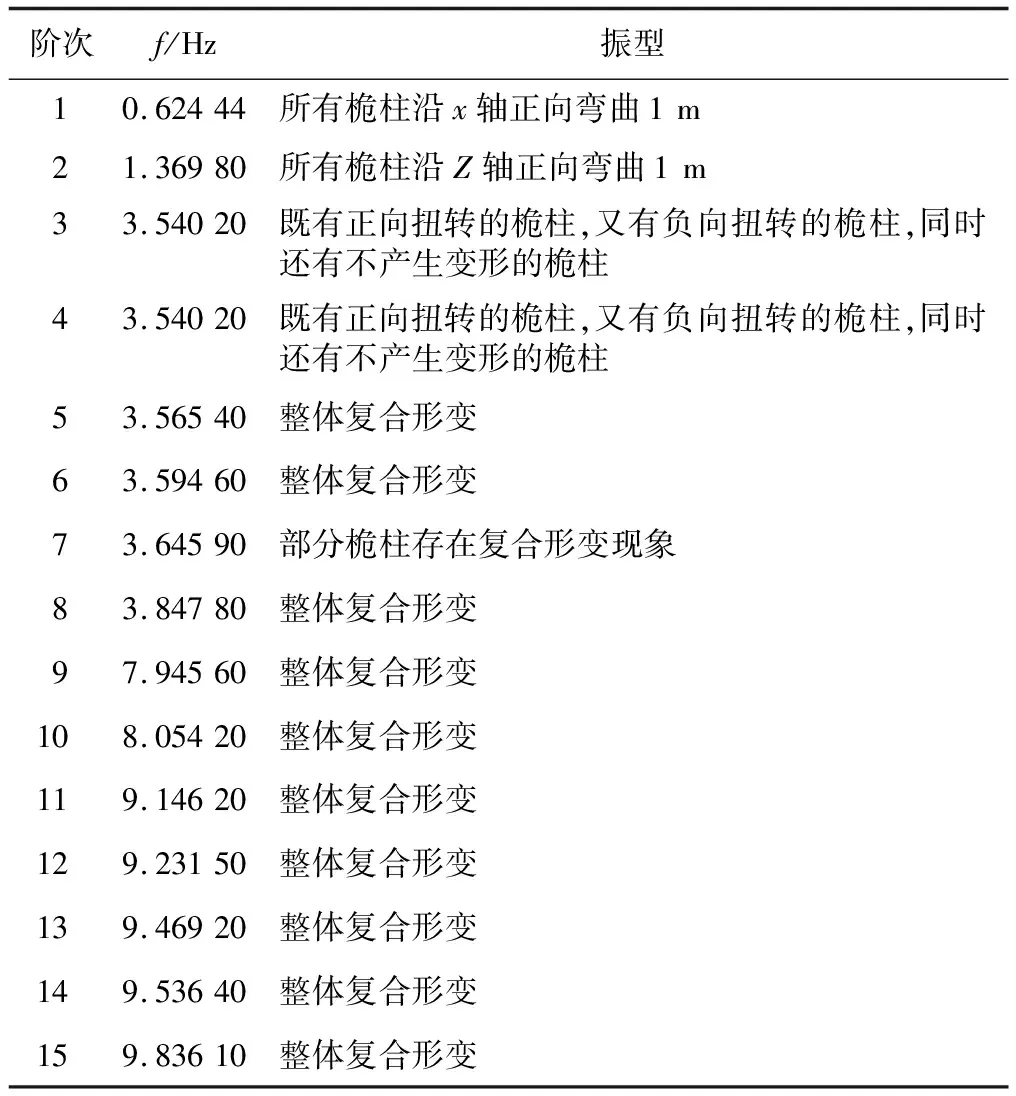
表1 高空带电作业平台机构前15阶固有频率及振型
由于10 kV自行式高空带电作业平台的振动频率不高,同时其结构较大,导致其在动态响应期间,低阶模态的贡献较为突出。加之在阻尼作用下,高阶模态部分衰弱速度较快,故高阶模态对响应的贡献可忽略不计。由此,本文模态分析只挑选了前15阶固有频率及其振型进行分析。通过查阅表1可以看出,若表中固有频率受到外界激振频率的干扰(相接近),那么高空带电作业平台结构可能会产生较大的振幅,导致疲劳损坏事故的发生。所以,在设计期间,若明确外界激振频率情况,可对固有频率进行调整,以避免外界激振频率对固有频率的干扰,降低疲劳损坏事故的发生。
2.2 谐响应分析
在结构系统中,周期响应会随着周期荷载的持续进行而产生,这也是所谓的谐响应。通过谐响应分析,能够得到不同频率下结构位移频率曲线,即响应值。在持续周期荷载作用下,结构系统的动力学运动方程可由式(9)表示。
(9)

(10)
(11)
此时,将式(10)、式(11)代入式(9)中便可得到谐响应分析运动方程,如式(12)所示。
(-ω2M+iωC+K)(U1+iU2)=(F1+iF2)
(12)
通过上述对谐响应分析理论的了解,本文拟定三个流程来实现谐响应分析:第一,构建相应的模型;第二,加载并求解;第三,观察结果。在对高空平台结构进行谐响应分析前,需要将模态分析结果考虑在内,在简谐荷载作用下,随着时间变量的改变,以挖掘结构位移、底部作用力及应力的变化情况。为进一步探究谐响应分析效果,以10 kV自行式高空带电作业平台中的升降机构中的三个节点(155、170、250)为对象,进行了探究,得到的作用力随频率变化曲线如图1所示。
由图1可以看出,节点响应位移和底部作用力随着频率的增大,均呈现出先增后减的趋势。具体可分为三个阶段:第一阶段,频率在0~30 Hz内急速上升;第二阶段,频率在30~40 Hz内出现峰值;第三阶段,频率在40~50 Hz内急速下滑至稳定状态。由此可见,升降机构频率在30~40 Hz内出现共振现象的概率较大。因此,在实际施工中,应降低激振力的产生,如在条件允许的前提下,尽量避免采取紧急制动。
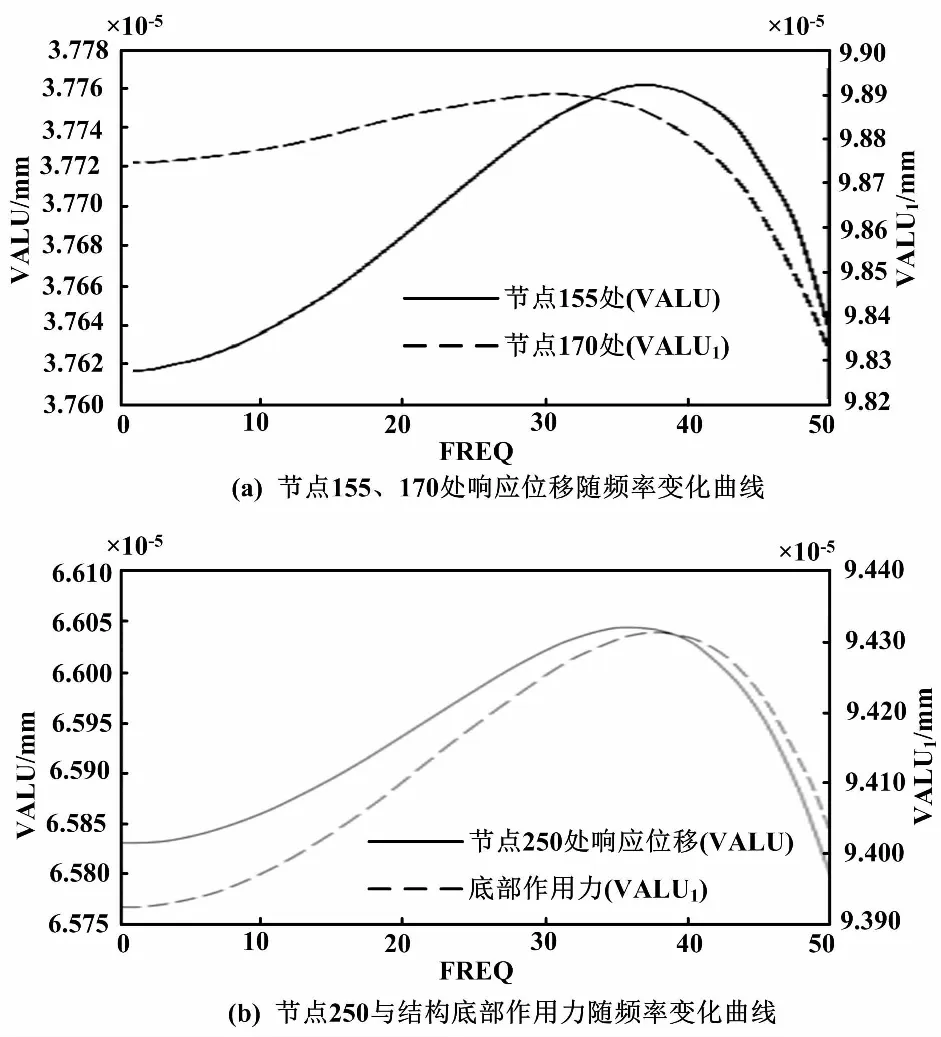
图1 节点155、170、250响应位移以及结构底部作用力随频率变化曲线
2.3 瞬态动力学分析
通过瞬态动力学分析,能够得到结构应力、位移应变以及反作用力在随机组合(瞬态荷载、稳态荷载以及简谐荷载)作用下的变化情况。其基本运动方程如式(13)所示。
(13)
在实际设计工程中,振动冲击试验一般不会开展。这是受场地条件、试验条件以及经济条件等多种因素制约导致的结果。因此,本文借助ANSYS软件对10 kV自行式高空带电作业平台结构中的升降结构进行了瞬态动力学分析,以获取该结构节点随时间变化时的速度、位移等情况,为10 kV自行式高空带电作业平台结构优化作出贡献。基于模态分析的结果,此处以升降机构为研究对象,进行了瞬态动力学分析,得到升降机构节点300处随时间推移而产生的速度、位移以及加速度响应变化曲线,同时亦获得了桅柱底部节点160处的变化曲线,具体如图2所示。

图2 升降机构节点160支反力、300处(位移、速度、加速度)响应曲线
由此可见,0~3 s内,升降机构处于冲击振动阶段,而后在时间作用下,升降机构逐渐步入稳定匀速阶段。也就是说,在3 s后升降机构的加速度为0,处于匀速直线运动状态。所以,在平台满载起升期间,操作人员应当把控好平台的速度(启动和制动速度),避免因不良操作(紧急制动和瞬时启动)导致的结构疲劳损坏。瞬态动力学分析的结果能为后期平台结构的优化提供参考,以提高平台结构运行的安全性、平稳性等。
3 优化设计
3.1 优化设计理论
优化设计属于高级分析技术。通过该技术能够得到产品的最优设计方案。其特点是能够直接使用ANSYS软件分析的所有结果,无需为目标函数与约束条件构建解析方程。
总体而言,可将最优设计理解为既能满足所有设计所需,又能通过多个方面节约设计成本,如产品的尺寸、质量以及形状等。最优设计方案也就是通常所说的有效方案。
3.2 优化方法
在控制条件作用下,目标函数达到最小值便是优化方法的最终诠释。在ANSYS软件中,主要有两种优化方法。第一,零阶近似法。该方法只涉及到因变量的使用。通过该方法,能够将目标函数和状态变量分别近似处理成最小值和所需的设计约束,同时亦能将约束优化问题过渡到非约束优化问题。由于该方法还具备使用便利和获取优化结果迅速的特点,因此在多个领域得到了应用。第二,一阶分析法。该方法以因变量的一阶偏导数为基础,寻找出正确的搜寻方向,进而获得准确的优化结果。该方法通过添加罚函数的方式,将目标函数约束优化问题转化成非约束优化问题。由于该方法获取的优化结果精度较高,导致其在空间变化上应用较为突出。
3.3 优化准则
令目标函数第j次迭代结果为Fj和Xj,设计变量第(j-1)次迭代结果为Fj-1和Xj-1。其中:X为矢量;Fb为目标变量;Xb为设计变量。若设计变量值和目标变量值满足式(14)和式(15)中的一个,那么就能断定迭代处于收敛阶段,可以终止迭代。
[Fj-Fj-1]≤τ,[Fj-Fb]≤τ
(14)
|XjXj-1|≤τ,|Xj-Xb≤τ|
(15)
式中:目标变量和设计变量的允差均由τ表示。
ANSYS软件中的循环次数控制法能够有效解决优化期间存在的不收敛问题。如在借助零阶近似法对结构进行优化设计时,可通过调用opsubp指令对循环次数进行设定,使其能够在满足循环次数情况下优化,避免发生不收敛的问题、。
3.4 优化设计流程
优化设计流程主要可划分三个步骤:第一,创建分析文件;第二,开始优化分析,并指定优化参数;第三,借助后处理器查看优化结果。每个步骤均可细分成不同的处理模块,具体如图3所示。
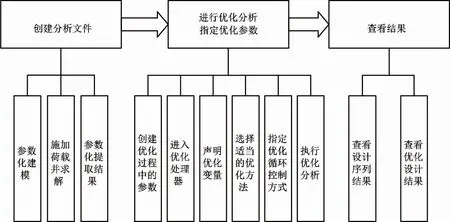
图3 优化设计基本流程图
3.5 优化设计分析结果
在前文动力学分析的基础上,本文借助ANSYS软件中的一阶分析法,对10 kV自行式高空带电作业平台升降结构进行了优化设计,得到了结构应力、位移、质量优化前后情况对比如表2所示。
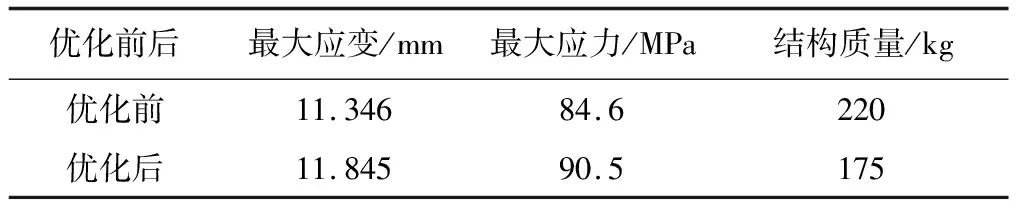
表2 结构应力、位移、质量优化前后情况对比
从表2可以看出,10 kV自行式高空带电作业平台升降结构经过优化处理后,其最大应变增大了0.499 mm,最大应力增大了5.9 MPa,结构质量减少了45 kg,具有较好的优化成果,且优化后的最大应变和最大应力均在可控值范围内。该方法既降低了工程成本的消耗,又未对平台结构运行的安全性造成影响,值得被同类工程优化所借鉴。
4 结论
本文首先对10 kV自行式高空带电作业平台结构组成进行了概述。其次,对10 kV自行式高空带电作业平台结构进行了动力学分析,如模态分析、谐响应分析以及瞬态动力学分析,旨在通过这类分析提高结构系统的安全性,为后继优化设计奠定基础。最后,在动力学分析的基础上,借助ANSYS软件对10 kV自行式高空带电作业平台结构进行了优化设计。其结果证明了本文优化设计的可行性。该设计能够有效降低平台结构设计成本,提高平台结构设计的科学性与安全性。
猜你喜欢
环球时报(2022-02-28)2022-02-28
广西电业(2021年5期)2021-10-20
小天使·一年级语数英综合(2019年2期)2019-01-10
小天使·一年级语数英综合(2018年11期)2018-11-23
电子制作(2018年19期)2018-11-14
小学阅读指南·低年级版(2018年5期)2018-11-02
通信电源技术(2018年10期)2018-01-25
现代工业经济和信息化(2016年5期)2016-05-17
现代工业经济和信息化(2016年4期)2016-05-17
工业设计(2016年6期)2016-04-17