
消毒防疫智能巡检机器人的设计
2021-06-17 06:53:30张雄刘浩钟宙明覃坤雪陈永强李猛
电子制作 2021年1期
张雄,刘浩,钟宙明,覃坤雪,陈永强,李猛
(天津职业技术师范大学,天津,300222)
0 引言
随着科学技术的不断进步,人工智能、虚拟现实、语音识别等高科技技术被应用到各种机器人上面,使得机器人更加自动化、智能化,推动了机器人行业的迅速发展。智能巡检机器人作为机器人种类的一种,主要用于各种场所、不同环境下的日常巡检工作。通过智能巡检机器人进行巡检,克服了传统人工巡检容易受到外界气候、环境等因素的影响,提高了工作效率,保证了巡检工作的正常进行。
智能巡检机器人的类型多种多样,如变电站智能巡检机器人、养殖场智能巡检机器人、输电线路巡检机器人等,其功能作用主要表现在日常巡检过程中的环境数据采集、视频监控、自动导航等。2020年一场突如其来的新冠疫情给我们的日常生活带来了严重的影响,居家隔离、减少外出、日常消毒等成为我们生活中的常态。为了抑制新冠病毒的传播,在众多公共场合(如车站候车厅、地铁站、教室等人流流动密集区)以及隔离区、病房、手术室等高危交叉感染区需要进行定期的人工消毒工作,为了减轻工作人员的劳动力度以及避免疫情的传播,本文提出并设计了一种消毒防疫智能巡检机器人,在巡检机器人的基础上,安装消毒喷洒装置,用于消毒液体的喷洒,完成消毒工作。
本文设计的消毒防疫智能巡检机器人采用绿色消毒的方式,基于酸性氧化电位水淋雾沉降实现空气消毒。根据功能设置要求,机器人在巡检过程中除了完成正常的环境数据采集、视频监控等功能外,还能够喷洒消毒液体。
1 系统总体设计
本文设计的消毒防疫智能巡检机器人主要用于公共场合下的环境数据采集、图像信息传输等日常巡检工作,同时通过安放在机器人本体上的消毒喷洒装置可以实现巡检过程中的消毒液喷洒功能,有效的减少了人力劳动,提高了工作效率,其外观示意图如图1所示。
根据实际应用功能设计需求,智能巡检机器人的移动控制方式包括自动循迹控制与远程手动控制两种:自动循迹控制利用磁导航模块实时检测地面中的电磁线,通过ARM处理器判断后进行电机方向、速度等参数的控制,从而使机器人能够按照指定路线往复循环移动;远程控制则利用PC端的上位机软件实时查看摄像头传输回来的图像信息进行机器人的移动路线手动调整。
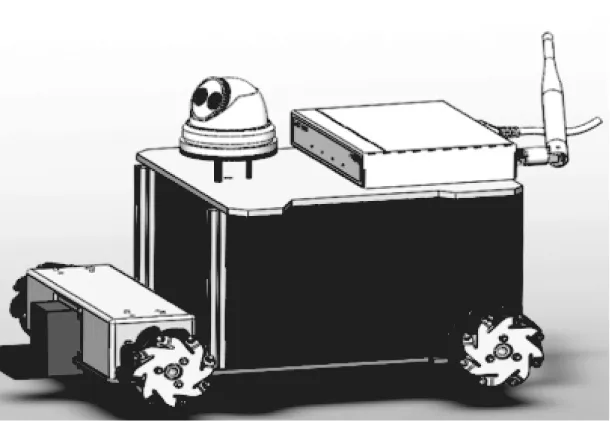
图1 消毒防疫智能巡检机器人外观示意图
2 系统硬件设计
本文设计的消毒防疫智能巡检机器人的硬件系统主要包括机器人控制系统、环境数据采集、图像信息采集等功能设计,其硬件设计框图如图2所示。
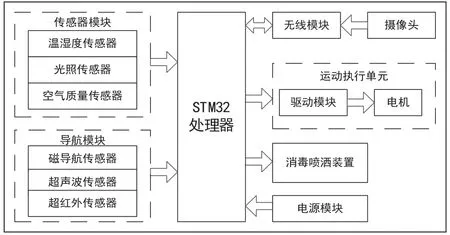
图2 系统硬件框图
通过系统硬件框图可以看出,消毒防疫智能巡检机器人的硬件系统以ARM处理器STM32F103ZET6为核心,外围配置传感器模块、导航模块、运动执行单元、摄像头、无线模块以及消毒喷洒装置等,从而实现机器人的自主移动、环境数据检测、图像信息采集与传输、消毒液体喷洒等功能,
■2.1 控制器模块
消毒防疫智能巡检机器人的控制器模块选择意法半导体ST公司设计生产的32位ARM处理器STM32F103ZET6,该处理器具有较高的工作频率,功能强大的定时器以及丰富的I/O外设接口、多种通信接口等,其实物图如图3所示。

图3 主控板实物图
■2.2 传感器模块
传感器模块实现机器人巡检过程中的环境数据采集,主要包括温湿度传感器、光照强度传感器以及空气质量传感器,不同类型的传感器通过各自的数据传输方式与STM32处理器进行连接,实现温湿度、光照强度及空气质量的实时检测。
■2.3 运动执行单元
运动执行单元实现智能巡检机器人的自主移动功能,由驱动模块、电机以及麦克纳姆轮组成,电机采用行星减速电机MD36N,该行星减速电机能够把输入的低转矩高转速通过齿轮组转换成高转矩低转速输出,从而在变速中提供较大的合力矩,并且保持较平稳的速度传递(始终有齿轮良好的啮合),其实物图如图4所示。

图4 行星减速电机及麦克纳姆轮实物图
■2.4 导航模块
为了实现机器人的固定线路导航,本文设计的消毒防疫智能巡检机器人配置了专为AGV磁条导航设计的磁导航传感器D-MNSV6-X8,通过D-MNSV6-X8传感器感应到磁条磁场信号后,输出开关量信号,给主控器提供所需要的磁条信号;同时为了实现自动循迹过程中的障碍物检测与避障功能,配置有超声波和红外传感器。
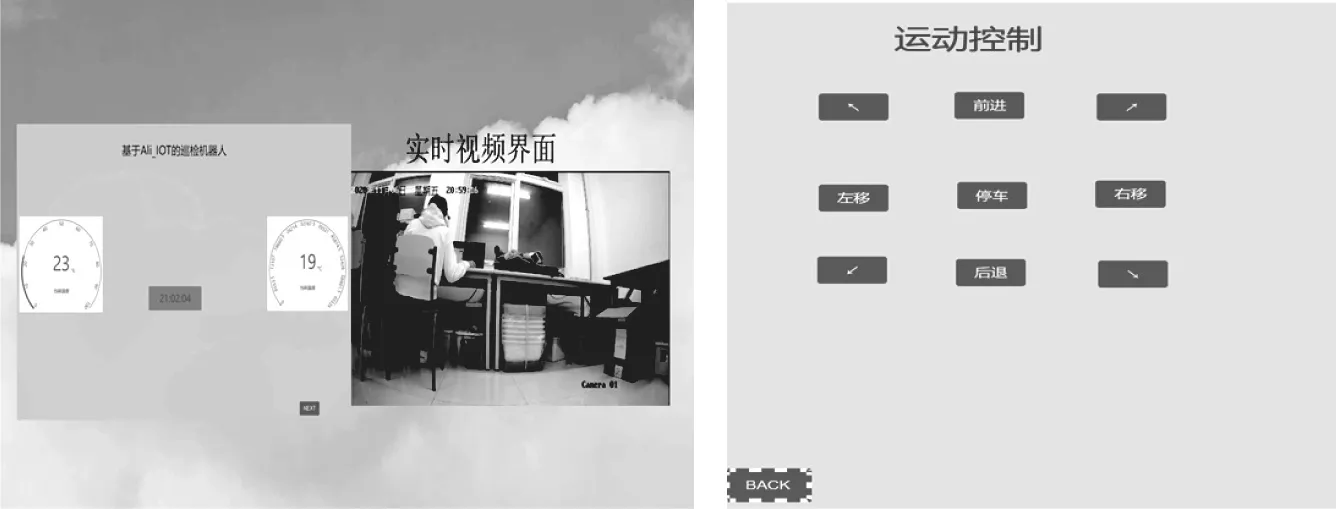
图5 PC上位机软件界面图
■2.5 消毒喷洒装置
消毒喷洒装置采用自吸隔膜水泵和雾化喷头的形式实现,自吸隔膜水泵的泵体与电机分离,泵体内无机械部件、无磨损。具有自吸功能、热保护、运转平稳、可以长时间连续空转,接通电体内的液体开始自动减压回流,水管内的压力不会增加,方便消毒液体的喷洒。
3 系统软件设计
消毒防疫智能巡检机器人的软件设计是在硬件系统的基础上通过软件程序的设计,实现智能巡检机器人的自主移动、环境数据检测、图像信息采集与传输以及消毒液体的喷洒等功能。系统软件的设计包括智能巡检机器人控制系统程序设计以及PC端上位机软件设计两部分内容,分别实现智能巡检机器人的控制与人机交互界面。
智能巡检机器人控制系统程序针对STM32处理器进行设计,采用C语言进行程序编写,主要包括传感器数据采集、循迹检测、电机控制等程序设计。
PC端上位机软件针对人机交互而进行设计,实现计算机环境下对机器人的远程监测与控制。软件设计基于可视化的基础开发工具QT5.12开发,设计的人机交互监控画面主要包括视频监控界面、数据监控界面、巡检机器人运动控制界面等。整个监控系统集成后使后台监控操作人员的操作效率极大提高。PC上位机界面如图5所示。
4 结束语
本文提出一种消毒防疫智能巡检机器人,综合运用手机APP、物联网、嵌入式、传感器等技术,实现巡检机器人自动模式和遥控模式的控制。自动模式下,机器人根据磁导航传感器检测地面中嵌入的磁导线实现自动循迹,从而对公共场所进行防疫消毒。遥控模式下,通过机载摄像机观察公共场所消毒环境的工况条件,用户根据工况条件,对不同消毒环境的雾化距离和药液流量进行动态调控。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:46
环球时报(2022-05-20)2022-05-20 13:05:53
防爆电机(2022年1期)2022-02-16 01:14:08
防爆电机(2021年3期)2021-07-21 08:13:00
防爆电机(2021年1期)2021-03-29 03:02:52
电机与控制应用(2021年12期)2021-02-28 07:55:22
人大建设(2020年4期)2020-09-21 03:39:20
基层中医药(2020年6期)2020-09-11 06:35:14
电子测试(2018年15期)2018-09-26 06:01:14
电子制作(2017年1期)2017-05-17 03:54:20
