激光制导武器半实物仿真系统的分析与实现
2021-06-16 07:19刘聪张洋
电子制作 2021年2期
刘聪,张洋
(中国飞行试验研究院,陕西西安,710089)
0 引言
半实物仿真系统是用于弹上部件引入仿真回路,并为其模拟出真实的应用场景的仿真方法,除实物外,以数学模型进行仿真。半实物仿真系统能够有效解决建模困难的问题,且具备较高的仿真置信度,能够为技术决策提供丰富可靠数据资源。因此,半实物仿真方法是激光制导武器系统设计与开发中必要的性能评价手段与建造工具,科学应用于系统的设计、研制、评估等各个阶段。目前,全球科技与军事力量都在不断强化,对于制导武器的开发水平也随着仿真技术的发展而快速提升,为提升我国武器装备的仿真实验技术,必须针对激光制导武器的半实物仿真平台进行科学研究与战略开发。
1 制导系统半实物仿真试验的目的和内容
对激光制导武器进行半实物仿真试验是为了利用仿真打靶的手段,将对弹的激光制导武器的制导部件与各部系统性能进行考核,保证制导精确度与系统动态性能,为激光武器的性能评判提供数据依据。关于稳定回路,关键是对自动驾驶仪中所涉及到的惯性器件与控制电路进行考核,关于舵机回路,关键是对其静态与动态特性对激光制导系统精准度与性能产生的影响进行考核;关于引导回路,关键是对导引头上的探测器进行非线性特征检测与目标跟踪特性检测,以此保证激光制导武器动态性能的质量与精准度的控制。制导武器半实物仿真系统的展开依据是按照由开环至闭环、由部分至整体、由小回路至大回路的标准[1]。激光制导半实物仿真系统试验内容及步骤如图1所示。
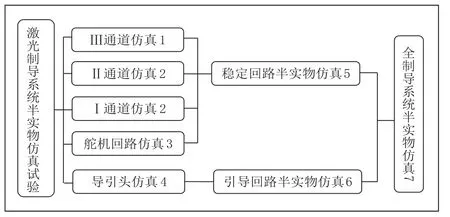
图1 激光制导半实物仿真试验流程
2 激光制导武器半实体仿真系统功能及组成
■2.1 半实物仿真系统功能解析
参照半实物仿真方法的相似性原理,可以确定半实物仿真系统具有以下三点功能。首先,半实物仿真系统能够对真实弹体的姿态与运动轨迹进行模拟;其次,半实物仿真系统能够为制导武器提供激光照射环境,计算并模拟出目标物体的运动;最后,半实物仿真系统能够接收弹上计算机发出的信号指令,实现六自由度弹道的模拟。
在制导武器半实物仿真系统中,实时仿真计算设备(其中包括A/D模块、D/A模块以及串口通讯等)能够见各部分功能的信息进行综合性处理,并利用控制柜和转台平台将系统内的信息数据进行传递交互;弹上部件所承载的三轴转台平台将弹体的形势姿态与运动轨迹进行模拟;激光制导模拟器将固定在两轴转台之上,负责将用于管控激光光斑的幕布位置;帮助系统计算机监测、模拟、记录相关的仿真数据。
■2.2 激光制导武器系统的组成
激光制导武器中制导系统的构成包括激光照射装置、导引头、舵机、弹体、自动驾驶仪等部件。此类制导武器的主要特征有以下三点。首先,在于激光半主动制导体制的运用以及激光导引与速度追踪导引律;其次,制导武器中是通过倾斜的三通道自动驾驶仪与燃气比例舵机来进行控制;最后,激光制导武器的弹道特点表现在零指令方式家末段导引上。控制理论视域下,制导系统是由稳定回路(即小回路)与导引回路(即大回路)共同构成。除去弹体本身的动力学与相对运动学方程外,稳定回路的所有控制装置都固定于尾部的仪器舱中,控制装置包括惯性器件、相关电路以及舵机,导引回路包含导引头与激光照射装置[2]。
3 激光制导武器半实物仿真系统结构
为了将激光制导武器进行综合型评估,将制导飞行中半主动弹药的相关部件进行性能与质量的仿真检测。把导引头、角速率陀螺、弹上计算机等设备添加至仿真回路中,规划出激光制导武器中用于指导和控制的仿真方案,系统模型结构如图2所示。
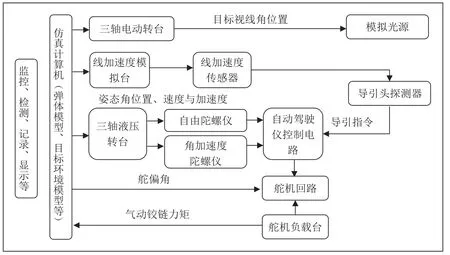
图2 半实物仿真实验模型结构
半实物仿真模型是建立在模块化的设计理念上,能够通过大气环境参数、弹道初始条件、激光模拟器参数、运动目标相关参数以及风干扰模型参数等,考核不同边界条件下弹体中系统的性能质量。在半实物仿真试验模型中,通过数学仿真对以及几项任务进行计算:六自由度有控弹道动力学及运动学方程式、大气环境模型、目标运动模型、室内弹目视线模型。在实际的测试流程中,激光光斑通过两轴转台对激光模拟器的作用下,照射到相应的幕布位置中,导引头在收到激光漫反射所产生的光斑能量后,发出制导指令,并通过弹上的计算机产生角速率陀螺信号,之后将生成的控制指令传输至仿真机中,建立完整的弹道方程计算,向三轴转台创造弹体的姿态,并参照弹目之间的关系,生成相应的角度指令,模仿出真实的LOS,保证角速率陀螺仪具备真实的姿态与运动轨迹[3]。
■3.1 弹目相对几何关系
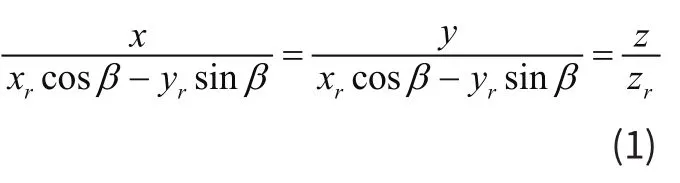
结合仿真布局中的机构组成,创建地面坐标系Oxyz,将导引头光轴中心设定为原点,幕布是铅垂平面,且幕布和Ox轴是平行关系。将转台回转中心和幕布之间的距离设为l,则轴转台与回转中心的距离是l32。基于仿真理论中的几何相似原理,仿真系统中的弹目视线方位角、弹道与高低角的视线方位角相互对应。基于室内环境几何方位可知,由于受到室内尺寸条件的限制,末制导段视线的高低角需控制在-30°—-45°之间,突破俯仰方向的可接受范围后,光斑则会投落至地面上。使地面坐标系以Oz为中心轴顺时针旋转,共旋转常值角度,获取新的坐标系Ox'y'z',使弹目视线归落至幕布上。结合弹目之间的位置关系,确定某时刻坐标系为(xr,yrzr),新坐标表现为:
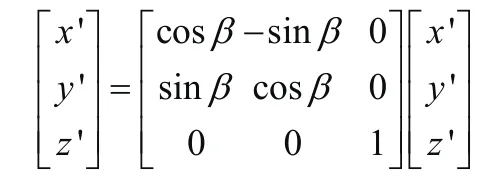
在新的坐标系Ox'y'z'中,关于视线所处的直线方程解析式如公式1。
进而可以推算出光斑的具体位置坐标:
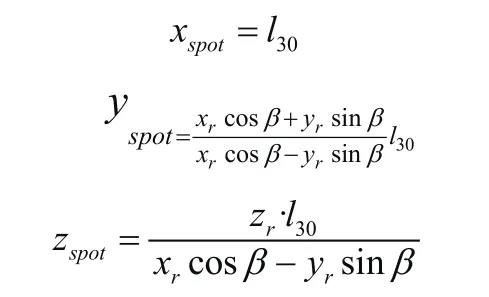
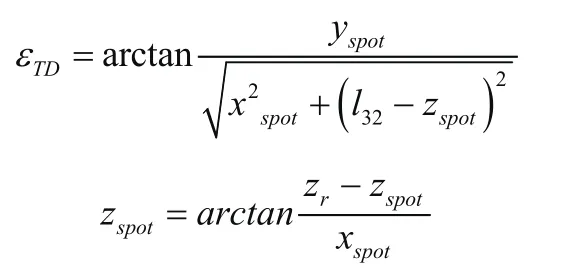
通过以上方程得出两轴转台关于高低、方位的指令:
■3.2 激光入瞳光学特性解析
当导引头处于飞行状态时,其捕获激光功率的密度会根据弹目距离的缩小而扩大,且光斑也会逐渐变大。因此,激光制导武器的中的模拟器应具备光斑与能量可调的功能,实现最大功率的有效照射,为导引头的飞行模拟逼真的照射条件与环境。基于大气光学基础理论知识,可以将导引头收到的功率(sP)与模拟器发出的激光功率(PL)这二者之间的关系表现为公式2:

公式中,Dr代表导引头接收面积;∂代表散射面积与光斑面积的比值;ρ代表反射率;LMT代表弹目实际距离;Ta代表大气透过率。考虑到光斑的大小会根据弹目距离的远近而产生变化,因此,将标准尺寸设定为CT×CT,因此,光斑大小rspot的计算方式如公式3所示。
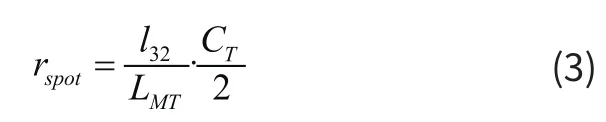
据此可知,Ps、rspot和弹目距离LMT都是反比关系。在仿真试验中,模型应结合弹目距离的变化而实时调整模拟器的能量与光斑大小。
4 激光制导武器半实物弹道仿真试验
将末制导段的弹目最大值设定为3500m,初始化弹目视线角设定为-30°。在两种初始弹道条件下,对激光制导武器进行半实物仿真试验,试验统计数值如表1所示。

表1 多次试验统计得出数值
根据试验统计数据得出,此激光制导系统的脱靶量能够小于0.8m,保证了对2m×2m面积目标的精准打击,此数据与实际飞行统计数据较为一致,可以确定数据的准确性与有效性。此外,脱靶量样本存在的标准差较小,达成验证标准,且半实物仿真系统可信度高、重复性良好。
5 结语
综上所述,基于实际的任务与功能需求,在激光制导武器半实物仿真平台中明确了相应的半实物仿真系统模型;通过室内弹目几何关系与导引头的入瞳光学特性对激光照射环境研究,提升了半实物仿真环境的真实性。利用半实物仿真试验,明确激光制导武器实行打击的有效指令,提高制导与控制系统的精准度,保证半实物仿真系统的可信性与重复性。
猜你喜欢
弹道学报(2022年3期)2022-10-08
小哥白尼(趣味科学)(2022年3期)2022-06-09
宇航计测技术(2021年6期)2021-04-19
兵器知识(2020年8期)2020-08-12
阅读(高年级)(2019年9期)2019-11-15
VOGUE服饰与美容(2019年8期)2019-11-12
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
科学与财富(2018年26期)2018-10-24
航空兵器(2018年1期)2018-04-09