
舰船直流区域配电网线路保护方法
2021-06-10 05:24王琦叶志浩
电机与控制学报 2021年5期
王琦, 叶志浩
(1.武汉科技大学 信息科学与工程学院,武汉 430081;2.海军工程大学 电气工程学院,武汉 430033)
0 引 言
舰船综合电力系统作为舰船发展方向在全世界范围内掀起了研究热潮。目前,美国DDG-1000驱逐舰、英国45型驱逐舰和CVF航母等主战舰艇已采用了综合电力系统及技术相对成熟、研制风险相对较小的中低压交流电制[1]。相对于交流网络,基于综合电力系统运行模式的舰船直流区域配电网在功率密度、供电可靠性、大功率负载控制稳定性等方面有其优势[2-3],被认为是下一代综合电力发展的目标。近几年,针对舰船直流区域配电网的研究层出不穷,大部分是对于该系统的稳定运行状态开展研究,主要集中在主网络结构仿真分析计算,如:文献[4]采用实时仿真软件Hypersim对典型舰船直流区域配电网络进行了仿真,针对网络结构中的变流器仿真模型较复杂的特点,搭建了可用于Hypersim的变流器简易等效模型;文献[5]针对舰船直流区域配电网络拓扑结构,进行了安全运行边界的计算分析。另有少量学者,针对舰船直流区域配电网的暂态特征,开展了继电保护方法方面的研究,如:文献[6]提出了一种用于对舰船直流区域配电网的分层式协调保护,分别针对多个电源连接拓扑和配电结构拓扑的特点,设置两种不同的直流保护,并建立两者之间协调动作的关系,对整个直流电网进行保护;文献[7]采用人工智能方法对舰船直流区域配电网进行了保护研究;文献[8]提出了一种可用于探测舰船直流区域配电网故障的保护方法。已有工作中缺少网络变流器对舰船直流区域配电网保护设置影响的相关研究,而且尚未有研究形成完整的保护方法来应对保护拒动作和误动作。
近年来,陆地新能源发电迅猛发展,其中部分智能微电网采用的中低压交直流混合电网和舰船交直流电网在电制、电压、主要组成元件等方面有相似性。陆地中低压交直流混合电网保护方面的研究也正在开展,文献[9]总结归纳了混合交直流微网中控制策略研究状态和发展方向,其中提到了针对故障保护需要进行智能自愈和协调控制方面的研究;文献[10]对比了电流方向保护方法分别在直流网络和交流网络中应用的特点,并提出了一种电流协调保护可用于直流网络;文献[11]概括了低压直流微网保护设计的各个细节,分析了多种故障特征;文献[12]提出了一种电网故障诊断的分阶段解析模型用于提高电网故障诊断的时效性。这些成果可为舰船直流区域配电网保护研究提供参考。
文章研究了舰船直流区域配电网特点以及系统特征对线路保护的影响,采用递归小波进行故障识别,对广度优先搜索算法进行改进并应用到保护控制中,形成三维综合保护域的新型保护方法。
1 舰船直流区域配电网结构特点
舰船直流区域配电网目前并没有形成固定的结构形式。文献[3-4]采用如图1所示典型拓扑结构进行研究。该系统采用直流发电机作为电源,各电源之间连接成环形网络,通过DC/DC和DC/AC变流器进行电压和电制的变换,对所划分区域内的负载支路供电。文献[2]中的舰船直流区域配电网结构是把交流电机作为区域供电电源,通过AC/DC变流器后,再对区域内负载支路供电,区域负载的供电支路形成环网;文献[5]研究的舰船直流区域配电网结构主要是采用了交流电机作为电源,将交流电源连接成环形电网后,再按划分区域进行AC/DC和DC/DC变成直流电制,对负载供电。虽然直流区域配电网络结构形式不统一,但有如下共同点:
1)使用了大量电力电子变流器实现电制、电压之间的变换;
2)使用了多种网络拓扑结构相结合。
可知,舰船直流区域配电网中线路保护设置必然受到变流器控制策略和网络拓扑结构影响。
2 变流器自身限流控制对线路保护的影响研究
电流时间保护是舰船线路传统保护方法。随着舰船电网结构的扩大,电流时间保护法不能够完全适用到所有网络结构中[13],然而基于该方法长期以来的可靠性,其对大部分故障情况的可控性以及其配套设备生产的成熟性,仍然是当下舰船电网线路保护的首选,其应用地位不可动摇。
舰船采用直流区域配电时,变流器成为了区域电源,由于大电流导致的发热容易损害变流器中的阀门,所以从设备角度出发,大部分变流器都设置了限流控制[4]。下面分析变流器自身限流控制对线路保护的影响研究。图1为系统主干线示意图,未显示区域配电网络中负载线路拓扑,另设置负载线路拓扑如图2。

图1 舰船直流区域配电网络Fig.1 A vessel DC zone distribution network
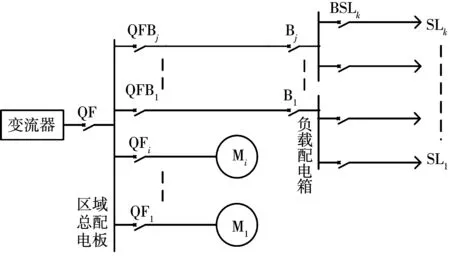
图2 区域配电交流侧负载供电线路网络Fig.2 Power supply network for AC loadin regional distribution
变流器出口端接区域总配电板,负责区域负载总配电,区域配电板出口直接接电动机负载Mi,或者通过支路开关QFBi,往下接到多个负载配电箱上。其中m(QFi、Bj、BSLk)是断路器动作电流计算倍数,无量纲,通常根据系统保护动作时间需求来查阅设计手册决定,一般是大于4倍瞬时保护,需要避开负载的启动电流,2~4倍延时保护,1.5~2倍后备保护。INSLk是负载线路额定工况电流值。
电动机负载Mi支路的断路器QFi的保护电流整定值计算为
IQFi=mQFiINMi。
(2)
其中:mQFi为该断路器动作电流计算倍数;INMi对应负载线路额定工况电流值。
负载配电箱总断路器Bj的保护电流整定值计算为
IBj=mBjINBj。
(3)
其中:mBj为该断路器动作电流计算倍数;INBj是额定工况下通过断路器Bj向下端负载供电时的电流值。
开关QFBj和开关Bj在正常工况下流过的电流一致,保护设置一致,即
IQFBj=IBj。
(4)
区域总配电开关QF的保护电流整定值为
IQF=mQFINQF。
(5)
其中:mQF为该断路器动作电流计算倍数;INQF是额定工况下通过断路器QF向下端负载供电时电流值。
设置区域负载线路故障位置如图3所示。F1为大型电动机负载支路故障,F2为负载配电箱供电支路故障,F3为小负载供电支路故障。
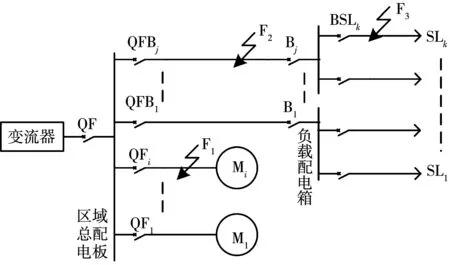
图3 故障位置示意图Fig.3 Fault locations
根据保护要求,发生F1时断路器QFi需要瞬时断开,发生F2时断路器QFBj需要瞬时断开,发生F3时断路器BSLk瞬时断开。舰船供电线路较短,除线路较长的末端负载线路发生故障外,其它故障都可以视为机端故障。如果电源为交流同步发电机时,发电机的故障瞬态电流最大值可以达到额定电流的十倍以上,所以,故障电流可以触发各级断路器动作。但是当区域电源为变流器时,由于其流入故障点的电流受到限流控制,所以发生F1故障时,如不计其它负载对故障点的溃流,故障电流和电流整定值必须满足下式,线路保护才能正确动作。
mcIc≥IQFi。
(6)
发生F2故障时,如果不计其它负载对故障点的溃流,故障电流和电流整定值必须满足下式的关系,线路保护才能正确动作,即
mcIc≥IQFBj。
(7)
发生F3故障时,如果不计其它负载对故障点的溃流,故障电流和电流整定值必须满足下式的关系,线路保护才能正确动作,即
mcIc≥IBSLk。
(8)
其中:Ic为变流器的额定电流;mc为对应的限流倍数。当网络结构确定时,以上公式中,设备额定容量和额定电流确定,可以通过调节变流器限流倍数设置和保护电流整定值设置来满足。
从式(6)可得
(9)
从式(7)可得
(10)
从式(8)可得
(11)
式(11)由于变流器的额定容量远大于小型负载容量,容易满足。但是式(9)和式(10),当负载容量和变流器容量接近,断路器瞬时动作电流整定值需要避开负载的启动电流时,断路器动作电流计算倍数会取值较大,此时按照电流时间保护原则所得的断路器动作电流整定值有可能大于实际故障电流最大值,因此可能会发生保护拒动。
3 线路保护对网络拓扑适应性研究
电力系统中,线路保护方法必须根据网络拓扑进行选择,但是实际运行中,主保护方法往往不能应对所有故障发生状况。针对图1所示主干网络,设置6处故障,分别为输电线路故障(F1)、电站母线故障(F2)、配电网电源(变流器)出口端故障(F3)、非重要负载故障(F4)、配电网母线故障(F5)、重要负载故障(F6),故障位置如图4所示。下面以中低压直流区域内发生故障为例,说明线路保护对舰船直流配电区域网络拓扑的不适应性。当整个配电网设置传统继电保护来应对类似F4故障时,必须对同一级别保护设置相同的时延,即QDi的动作时延为Δt1,TBi的动作时延为Δt1+Δt2。同时,为了应对配电线路发生的F3故障,所以必须考虑进口端的保护Q1与保护TB1组成时间上的配合,设置Q1的动作时延为Δt1+Δt2+Δt3。由QDi、TBi、Q1组成的保护动作覆盖范围如图5所示。

图4 故障位置Fig.4 Fault locations
从图5可以发现各保护之间出现了重叠,表明在重叠区域发生单一故障时,会触发多个保护误动。仿真得到F3故障时开关动作情况如图6所示。

图5 保护范围重叠情况Fig.5 Overlapping of protection scope

图6 保护动作情况(传统保护方法)Fig.6 Action of traditional protection method
虽然故障被切除,但是由于QD1、QD3动作,在未起动保障支路供电时,导致系统失电范围扩大,正常供电区域及失电区域如图7所示,其中阴影部分为正常供电区域,其他中低压配电区均失电。
图7 供电区域示意图Fig.7 Schematic diagram of power supply area
4 考虑保护覆盖范围、时间尺度、幅值尺度的三维保护覆盖域研究
通过上述分析可知,传统线路保护方法在舰船直流区域配电网中的适应性面临挑战。结合舰船直流区域配电网的自身特点,研究中低压直流配电区的组合供电情况,采用递归小波检测作为电流保护故障识别辅助判据,改进广度优先搜索方法进行开关动作排序,设定各处保护的覆盖范围,结合时间尺度和电流幅值尺度,形成三维保护覆盖模式。该控制方法的3个维度相互独立互不影响,能够很好地划分各开关的保护覆盖范围,满足继电保护要求。
4.1 基于递归小波的故障识别
从上可知,当变流器下端支路发生三相短路故障时,由于变流器的限流控制,有可能会导致原有的线路保护方法发生拒动。电流幅值大小不能成为支路保护控制动作的唯一判据,需要同时识别支路故障发生时变流器出口端电流特征。对变流器出口端发生三相故障后的故障电流和正常电流分别进行递归小波分析,得到图8所示波形。
可知,短路发生后0.1 s,递归小波明显检测到了信号故障的发生,振幅为0.7,而正常电流的递归小波的检测信号振幅一直处于0.01内。递归小波采样频率为105Hz,从图8可以看出能够满足保护快速性要求。

图8 电流波形的递归小波特征图Fig.8 Recursive wavelet characteristic graph of current waveform
4.2 基于改进的广度搜优法的保护覆盖范围研究
传统广度优先搜索法的应用前提是默认与v关联的节点优先级相同,即节点之间的联通路径权值相同。但是舰船中低压配电区的开关之间一般构成后备关系,因此与某一开关相邻的开关优先级可能不同。结合这一需要对传统的广度优先搜索法进行改进,模拟自然界树丛向阳侧生长更快的特性,根据联通线路径上的权值大小进行标号:
1)任取v∈V(G),标号l(v)=0,令l=0。
2)当所有标号为l的顶u相关联的边之端点皆已标号,则转3)。否则,根据与u相关联边上的权值分布,按从小到大的顺序依次在未标号的顶标为l+1、l+2、…、l+n,n为与u相关联边的个数。并标志这些边,用l+1、l+2、…、l+n代替l转2)。
3)止。见图9。

图9 改进的广度优先搜索算法连通图 Fig.9 Improved breadth first search algorithm
图9中联通线上的标号Oi为与顶相连端点所对应的权重,其中,i代表对应的权重值。粗实线是改进BFS生成的绿色生成树,未生成的联通线上的权重未标出。
结合船舰电力系统中低压配电区的保护分布特征分析,定义如下4类开关:
1)G类开关:发电机出口端的开关GBi,这类开关属于控制整个综合电力系统供电段的总开关,一般在发生故障后,需确定所有它类开关均不再动作而该类开关仍有动作请示信号才会允许动作。
2)Q类开关:直流变流装置的入口端开关Qi和驱动负载逆变器入口端开关QRi,该类开关不是控制整个中低压配电区域的供电总开关,就是控制着驱动负载的最远端开关,都属于远后备保护。
3)L类开关:包括与发电机端直接相连的母线上开关LBi、输电线路上开关QFi,以及中低压配电中直流变流装置出口端开关TBi和中配电网线路上开关QDi。这些开关既不直接与电源端相连,也不直接与负载端相连,但是TBi一般作为QDi的后备保护,LBi一般作为QFi的后备保护,因此TBi和LBi优先级别较低。
4)B类开关:直接与负载连接的开关,即保护与中低压配电区中负载直接相连的开关Bi,也包括与驱动负载直接相连的开关QMi。该类开关直接与负载相连接,是最低一级的开关,负载支路发生故障后,通常最先动作。
同一类开关中含有多个开关,有些开关优先级别相同,如QDi、QFi,但这些开关属于不同的供电区域,中低压配电区内发生故障会对流过QDi的电流造成影响,几乎不会造成QFi处过电流,反之亦然。当保护识别出故障后,发出断开请示信号,将上述各类开关的断开请示信号按照其所在位置设置优先级别,如表1所示。

表1 开关级别分类
结合开关动作优先级与改进的广度优先算法,可以限制保护覆盖范围,如图10所示。
其中图10(a)为传统方法的保护动作覆盖范围。图10(b)为采用了改进BFS方法时保护的覆盖范围,可发现此时保护的覆盖范围被开关的优先级别严格限制,层次间无重叠,动作判断清晰明确。

图10 保护覆盖范围三维比较图Fig.10 3-dimensional comparison of protection coverage
4.3 保护方法
保护方法流程如图11所示。

图11 保护控制流程图Fig.11 Protection control flow
故障识别后,触发了保护动作的开关发出动作请示,统一信息平台确定开关动作的顺序,以一定的时间间隔依次向发出了断开请示的开关发送允许动作信号。每发出1次允许动作信号前,核对相应开关的断开请示信号是否依然存在,若该开关的断开请示信号已经消失则不动作。这样就能根据网络拓扑和短路点的不同随之改变开关的动作顺序,确保保护的选择性,同时排在后面动作的开关为排在前面动作的开关提供了后备保护。
5 仿真分析
以图4中低压直流区域内发生F3故障为例,验证保护方法的可行性。当故障发生后,通过故障识别,部分开关发出了断开请示信号,如表2所示。

表2 开关信号
各个发出了断开请示信号的开关在故障发生后的第2 ms的电流采样值如表3所示。

表3 电流采样值
得到存在的唯一电流最大值对应开关QD1,将开关QD1确定为源。根据改进的BFS,以开关QD1为顶的系统连通图上各开关标号如图12所示。
图12可知,F3发生故障时,保护动作的覆盖范围为排名0、1、2的开关。经过Δt1的时间间隔,若QD1仍发出断开请求信号则最先得到允许,QD1断开后,再经过时间间隔Δt2后,只有TB1依然发出断开请求信号,此时再断开TB1,则系统中所有开关都不再发出断开请示信号,故障得到隔离。仿真中开关动作情况如图13所示。

图12 系统标号示意图Fig.12 Switch label diagram

图13 保护动作情况Fig.13 Protection action
对比时间、电流尺度的二维保护覆盖域(图14(a))和考虑保护覆盖范围的三维保护覆盖域(图14(b))。

图14 保护域对比Fig.14 Comparison of protection areas
其中图14(a)采用电流-时间保护方法的保护覆盖范围,图14(b)为采用改进BFS-电流-时间的三维保护方法的保护覆盖范围。可知在图14(a)中,电流-时间保护方法在满足动作条件后,多数开关的保护范围重叠,造成多个开关误动作。在图14(b)三维曲线图中,优先级为0的开关最先动作,剩余开关按照优先级顺序依次给予动作允许信号,开关动作依次有序进行,互不干扰又层层嵌套,满足继电保护要求。
6 结 论
文章分别从设备级和系统级分析了传统舰船保护方法对新型舰船直流区域配电网的适用性,根据舰船直流区域配电网特点,采用递归小波检测进行故障识别,对广度优先搜索算法进行改进,提出了基于优先级别的开关动作控制算法,将该动作控制算法和传统的舰船线路保护结合,形成一种三维保护覆盖域的舰船直流区域配电网线路保护方法,在软件中对方法进行了仿真验证,结果表明该方法既保留了传统线路保护的优势,又避免因为配电区域变流器控制策略和网络拓扑结构而引发的错误控制,能很好地适用于舰船直流区域配电网。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
测控技术(2021年10期)2021-12-21
舰船科学技术(2021年12期)2021-03-29
通信电源技术(2018年3期)2018-06-26
电测与仪表(2016年8期)2016-04-15
通信电源技术(2016年4期)2016-04-04
舰船科学技术(2016年1期)2016-02-27
电源技术(2015年11期)2015-08-22
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年10期)2015-04-09
