水下管道清淤疏浚机器人驱动控制研究
2021-06-07 06:18郭昆鹏赵银江汤家源尹新彦
科技创新与应用 2021年14期
郭昆鹏,赵银江,汤家源,尹新彦
(1.中国水利水电第七工程局有限公司,四川 成都610213;2.北京理工大学珠海学院,广东 珠海519088)
近年来,环境恶化及持续强降雨是导致城市发生内涝的主要原因,因此迫切需要增加城市排水管道容量。另外,城市居民生活水平提高,城市工业园区发展迅速,生活及工业废液排放量增大,多年来管道内的淤泥聚集,以及泥沙沉降使得主要排水干道的排水能力明显下降,是导致城市排水管道堵塞的主要原因。但是从根本上讲是因为城市排水管道排污能力有限。为了解决城市的快速发展与滞后的基础建设的矛盾,我国已经开始启动排水管道整改项目的试点工作。为了解决这一问题,根本举措是改造城市排水管道,但是我国城市人均占有排水管道长度0.55m,远低于发达国家人均4m的水平,采取这种措施需要大量资金及建设周期冗长,难于即刻缓解大量城市雨季看海的窘态。因此,排水管道的清理工作对缓解目前状态非常重要。
目前,我国管道及暗涵清理工作依旧依靠人工清理为主要的清理方式,即人工下井穿缆或疏通。而城市排水管道和暗涵大多数位于人口以及建筑物密集区域,传统人工清理作业占地面积大,容易造成污泥洒落地面,污染环境,臭味飘逸,给周边居民生活带来不便,同时影响市容风貌;再者传统人工清淤效率低下,而且城市排水管道和涵道的内部环境相当恶劣,气味难闻,可能存在大量甲烷等有毒气体,严重影响一线作业人员的生命安全。水下管道清淤机器人的研究具有重要意义,所以水下管道清淤机器人的研究工作已经开始受到研究机构及部分高校的重视。
1 总体设计方案
本系统设计一套水下管道清淤疏浚机器人系统,适应于宽度为1~3m不等的城市排水涵道,实现“人不下井,路不开挖,水不断流,泥不落地”的城市污水涵道清淤疏浚工作。管道清淤疏浚机器人采用中央承力结构,其机器人本体采用高强度合金钢材框架,搭载可拆卸的作业底盘,上方布置水下电力系统,水下仪器仓,水下液压动力单元(见表1、图1)。
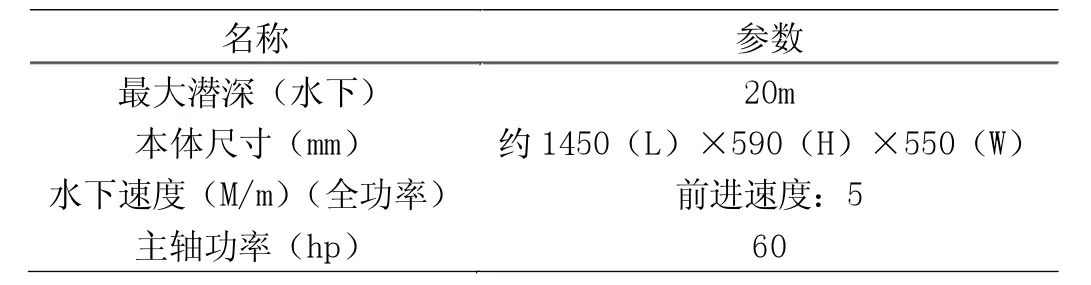
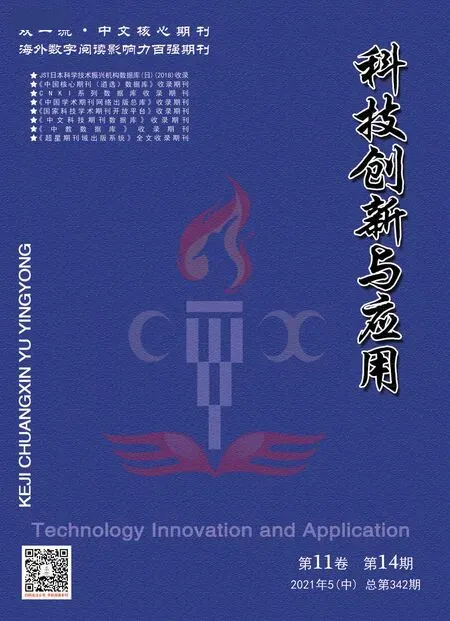
表1 设计主要参数
考虑到涵道中的工作环境情况复杂多变,机器人的运动驱动装置为履带系统,采用高耐磨、耐腐蚀的橡胶履带,并具有防滑深凹凸花纹,增加其抓地能力,增加摩擦力避免打滑现象。该机器人采用减速箱液压马达驱动履带系统。控制硬件包括驱动电路设计、控制层电路设计,采用模糊PID控制策略实现了液压马达的驱动控制(见表2)。

图1 水下管道清淤机器人样机示意图
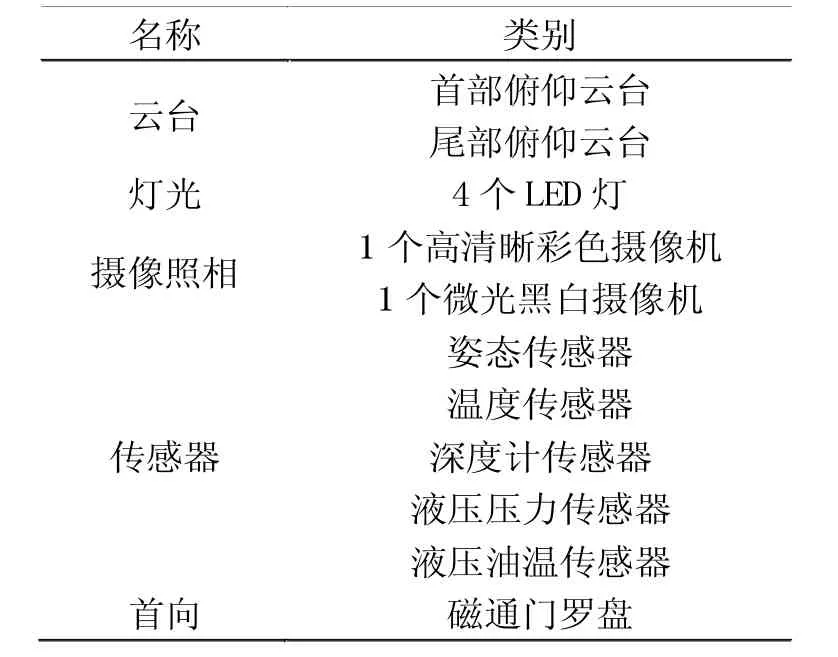
表2 机器人搭载设备
2 驱动结构
驱动系统的动力源是四驱动液压马达,通过推进器控制器独立驱动左、右侧主动轮的方式,这种结构行动灵活,具有越障能力强的优点。而且左、右履带驱动结构参数、性能基本相同,因此在清淤机器人直行、后退、转弯和制动时方便对机器人左右驱动分别进行控制。在液压驱动系统设计中,采用了溢流阀来调整和控制工作系统管道的压力,在左右驱动支路采用减压阀配合单向阀来保证阀后的压力。既要满足液压马达转动速度的控制,又要满足左右驱动解耦控制的特性要求,以保证足够的驱动力矩和转速控制精准度。
3 驱动控制系统
机器人的驱动控制系统分为水上控制台和水下驱动控制两部分组成。由于城市排水管道内壁的钢筋混凝土材料对无线通信信号具有吸收和屏蔽效果,为了提高机器人信号传输的稳定性,采用脐带缆的有缆式通信,来实现地面控制中心与清淤机器人本体之间的数据传输。信息传输采用1路光纤通信和1路电力载波通信通道提高系统的可靠性双环自愈式光纤。
3.1 地面(水上)控制台
采用工程计算机设计了地面控制台,控制台包括对清淤机器人各个环节动作执行的控制按钮和霍尔摇杆、观察窗口等。控制器通过采集到的不同信号,按照通信协议对数据进行打包,并通过零浮力电缆发送至井下清淤机器人本体。控制台模块设计为两套控制系统:一是手动控制系统,该系统可通过地面控制台的控制按钮,以及霍尔摇杆等人机接口来控制清淤机器人前进、后退、加速、减速及紧急停车,并实时显示机器人的工况等,在机器人刚进入工作面及遇到突发情况时可以采用该模式。二是智能控制系统,该系统由清淤机器人根据传感器检测,自动执行任务,在常规任务中可以开启该模式,降低作业难度和工作量,增强清淤机器人的工业推广应用性(见图2)。

图2 管道清淤疏浚机器人驱动控制系统
3.2 水下驱动控制
清淤机器人水下推进器驱动部分由液压马达驱动、传感器检测电路和推进器控制等模块组成,并可以通过软件的方式对机器人驱动控制系统进行自诊断智能控制。地面操作人员根据涵道内机器人摄像机传输回来的画面,确定作业指令和行走指令,通过线缆远程控制,控制清淤机器人在排水管道内作业。涵道内环境复杂恶劣,淤泥聚集程度不一,而且含有各种垃圾杂物,采用履带式行走具有爬坡、越障能力强,结构简单,平稳性好。
清淤机器人的驱动系统是清淤作业能顺利完成的关键,需要机器人根据管道内的复杂环境,适应管道内的各种行走环境,采用模糊控制确定PID参数的控制算法实现机器人运动控制。PID控制将输入偏差的比例、积分和微分通过线性组合构成控制量,并将信号离散化进行运算处理,实现对被控对象的最优化控制(见图3)。

图3 PID控制原理图
本设计采用增量式离散PID控制算法,计算过程中只需当前值和前两次的值,可以避免数值累加增大计算量,增量变化较小,可以达到比较好的控制效果,其控制方程如下式:

在式(1)、式(2)中:

其中,kp为比例系数,ki为积分系数,kd为微分系数,T为采样周期,E(kT)、E(kT-T)、E(kT-2T)为第k、k-1、k-2采样时刻输入的偏差值。
当液压马达控制系统接到动作指令后,开始执行液压马达调速运行控制。
4 仿真结果与分析
清淤机器人由四个液压马达驱动其两侧的运动系统,通过改变四个马达的转速来实现清淤机器人的运动控制,因此控制机器人直线向前运动时,由于两侧液压马达驱动结构的特性,譬如减速机构的差异与运动过程中的干扰因素,导致两侧马达的转动状态并不能保持一致。管道环境复杂多变,譬如轮子打滑、障碍物阻碍、地面泥泞不一致导致两侧履带与涵道摩擦力不等,都会导致机器人不能实现直线向前行走的控制目标。虽然各马达的闭环控制系统能够加快控制响应,提高控制精度,但并不能很好地保证两侧马达的协调性及速度一致性。在仿真实验中,为了提高履带机器人直线运动性能,在两侧液压马达各自闭环控制的基础上,设计了速度同步补偿器实现两个马达的同步控制。

图4 控制器仿真模型图
PID控制器中设置参数的初始值为:Kp=19.5,KI=9.5,KD=2.5。采用模糊PID算法,在第5秒时加入干扰,可以得到如图5所示结果。从结果中可以得出以下结论,采用本算法无超调,调节时间比较短抗干扰性好,具有很好的稳定性。
图5 存在干扰时的仿真结果
由此可见,增量式模糊PID控制算法对本清淤机器人运动控制系统的稳定性和控制效果较好,初步实现了机器人液压马达转速控制,使得机器人实现涵道中的运动。
5 结束语
以上研究成果,实现了清淤机器人的安全稳定运行,在不中断涵道正常排水前提下,快速、安全、高效地完成了城市排水涵道的清淤工作。清淤作业过程中无需作业人员进入涵道内,改善了一线人员的工作环境,保护了作业人员的人身安全,提高了清淤机器人的控制性能。为水下管道清淤疏浚机器人长时间安全可靠运行奠定了基础。
猜你喜欢
陕西水利(2022年11期)2022-11-29
建材发展导向(2021年19期)2021-12-06
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年11期)2021-07-28
建材发展导向(2021年7期)2021-07-16
建材发展导向(2021年6期)2021-06-09
作文周刊·小学三年级版(2020年24期)2020-07-17
建材发展导向(2019年7期)2019-11-29
棋艺(2016年4期)2016-09-20
筑路机械与施工机械化(2014年2期)2014-03-01