一种关于自由同步移动式医护设备的设计研究
2021-06-04 07:51郝婉秀孟俊焕朱传达韩稷潆
汽车实用技术 2021年10期
郝婉秀,孟俊焕,朱传达,韩稷潆
(德州学院能源与机械学院,山东 德州 253023)
前言
随着中国现代化水平的提高和人工智能的崛起,越来越多的智能机器人广泛地应用到了各行各业,医疗是一个关乎民生的行业,实现智能化将对患者的治疗有着极大的重要作用。目前已经有很多智能医疗发明应用到了实际之中,给医护人员和患者都带来了极大的便利。
但目前我国的医护水平还有待提高,特别是今年突然爆发的疫情,患者居多,然而医护人员数量有限,对于一些需要长期住院治疗的人群来说他们需要长期的治疗、持续地输液,需要医疗器械的检查,但同时他们也需要户外漫步锻炼,需要出去呼吸新鲜空气等活动,由于医护人员有限,不能为每位患者提供长时间陪伴的服务,故针对这种情况,我们推出了自由同步移动式医护设备,适用于那些需要离开病床活动的患者。
1 移动控制原理
四驱麦克纳姆轮的移动包括左右前后及斜向平移、左右转向及中心自转等,都是通过四个驱动轮不同的转向分配取得,车轮的配置如图1所示:

图1 车轮的配置
物理上我们都知道,速度是可以分解的,而麦克纳姆轮正是利用速度方向的分解特性,在不改变车体方向的条件下实现全向移动[1]。
1.1 车体的移动与车轮转向配置
(1)前行,示意如图2所示:

图2 车轮前行
(2)后退:同前行,四个车轮相反方向转动即可。
(3)左移,示意如图3所示:

图3 车轮左移
(4)右移:同左移,四个车轮相反方向转动即可。
(5)左前斜行,示意如图4所示:

图4 车轮左前斜行
(6)右前斜行、左后斜行、右后斜行:同左前斜行,给不同车轮分配转向即可。
当然,不仅可以调节转向来使车体前后左右斜向移动,还可以通过控制转速(即力的大小)实现车体各个方向的移动。所以麦克纳姆轮型车体的移动方式,可以通过控制四个车轮的速度矢量(大小和方向)实现全向移动。
2 同步跟随功能设计原理
同步跟随功能是利用人体传感器并搭配超声波测距传感器,将使用者的位置信息输入单片机,根据同步移动的算法,通过PID调节车轮的转向和转速使服务架与使用者相对静止[2]。示意如图5所示:

图5 同步跟随示意图
2.1 实现步骤
同步跟随功能步骤分解(一个人体传感器和一个超声波测距传感器为一组传感器):
(1)传感器组转动位置,使中心传感器指向跟随目标;
(2)人体移动,相邻传感器采集到目标人体的信息;
(3)传感器组转动,使中间传感器重新采集到人体信息;
(4)根据传感器组的转动角度(即电机输出的转动脉冲信号)和两次中心传感器采集到的距离之差,计算车体移动的x轴距离和y轴距离数据;
(5)单片机输出信号控制车体移动相应距离;
(6)单片机的运算速度非常快,可以设定每几毫秒进一次中断进行该算法循环一次,再加上车体移动PID调节,使车体与人的移动处于静态平衡从而达到相对静止。
3 路线循迹功能设计原理
考虑到实际情况,采用探测墙面的循迹方法,使服务架贴近墙面行驶,由于墙面互相垂直,适合麦克纳姆轮的前后及横向左右运动。
每边仅用三个检测距离的光电式红外传感器就能实现对一面墙的检测,车体边侧前部、中部和后部各配置一个指向同一个墙面的光电式红外传感器,前部和后部的传感器设定最远检测距离[3]。其安放位置如图6所示:
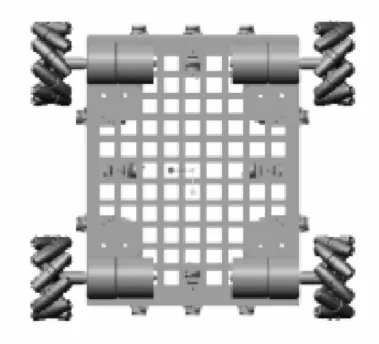
图6 传感器安放位置
3.1 实现步骤
(1)当两个传感器都检测不到墙面即远离墙面的时候,车体向墙面移动;
(2)当只有一个检测到墙面另一个检测不到的时候,表明车体相对墙体有一定的偏差,需要转动调节至与墙面平行;
(3)而当中部的传感器检测到墙面时,表明车体距离墙面过近,有相撞的危险,需要向远离墙面的方向行驶,若是在行驶过程中部传感器检测到墙面,则车体的行驶方向与墙面不平行,需要微调转向;
(4)当没有碰到这些情况且与人体保持在设定范围之内,车体向前移动。
如此一来,车体便能与墙面保持一定的距离下实现动态平衡,一直保持这个安全的距离。
当然,循迹功能的前提是跟随功能的实现,只有在与使用者保持一定的距离时采取循迹功能,当与使用者的距离大于设定值时,则取消循迹功能,只有满足与使用者的距离和与墙面的距离这两个条件时,才自动切换到循迹模式。而这样的条件,又满足了服务架会跟随使用者行驶,而不会遇到转弯车体自己转向的情况。
4 智能避障功能设计原理
移动时,不可避免地会遇到各种障碍物,所以要有智能避障这个功能。当然,智能避障功能是在同步跟随和路线行驶的模式中完成,当车体遇到障碍物时,车体首先触发断续的蜂鸣器警报,警示使用者车体遇到障碍,会作出路线上的调整。智能避障的实验方式也较为简单,只需通过检测障碍物的光电式红外传感器对周围障碍的检测,通过中断之前的移动算法,切换到避障算法,使车向没有障碍物的方向并与障碍物保持一定距离绕过障碍物重新回到正常行驶的路线上,便可完成智能避障功能[4]。避障路线如图7所示:

图7 避障路线图
5 服务功能
设置挂钩,挂输液瓶;设置托盘,为患者放置药品、饮水、输液瓶的物品;设有底座,盛放电源等其他电子医疗器械,设有报警器,在病人突发症状的时候发出警报,便于及时救治。
6 结论与展望
自由同步移动式医护设备为处在艰难困苦中的人们提供更全面的照顾,使在疾病中的人们也能体味到科技创新带来的幸福,使创新真正地去帮助需要帮助的人。希望真正可以为我国的医疗事业提供便利,为智能服务型机器人开拓更宽的前景。
猜你喜欢
科学与生活(2021年24期)2021-12-06
当代陕西(2020年17期)2020-10-28
学苑创造·A版(2017年5期)2017-05-09
电脑知识与技术(2017年5期)2017-04-08
电脑知识与技术(2016年17期)2016-07-23
无线互联科技(2015年6期)2016-03-05
计算机辅助工程(2012年5期)2012-11-21
中学生数理化·高一版(2008年6期)2008-11-15
电子世界(2004年6期)2004-07-27