图基导航的高速公路划线车无人驾驶系统
2021-06-03 06:11:06山东省路桥集团有限公司港航公司王绍磊
电子世界 2021年9期
山东省路桥集团有限公司港航公司 王绍磊
山东交通学院 石 磊
山东交通学院 徐吉存 李仰印 董兴学 高珅琦 杜连旗 王 康
从上世纪八十年代起,我国高速公路建设快速发展。截止到2018年12月28日,我国高速总里程已经达到14万km,位居世界第一。车辆可以在高速公路上安全行驶,道路标线的作用功不可没。按照国标要求,目前道路标线的喷涂工作量相当大。当前,国内普遍采用人工划线,工作速度慢,劳动强度大,已经不能满足当前形势发展的需要。基于我国目前道路划线自动化程度不高、公路里程迅速增加和公路养护工作量不断加大的现状,研究开发一种高效、智能化的公路划线车,对提高我国公路养护的机械化水平、减小工人的劳动强度具有十分重要的实际意义。本文设计了一种以STM32F767单片机为车辆控制器核心,以视觉处理技术为巡线导航的高速公路自动划线车无人驾驶系统。该系统主要包括车辆控制系统、视觉导航系统、动作执行系统、人机交互管理系统等子系统。
1 系统总体设计方案
1.1 系统功能介绍
本文为提高速公路划线的工作效率、自动化程度,降低高速公路划线的人工成本和工作强度,设计了一种基于图像导航的高速公路划线车无人驾驶系统。本系统与现有划线设备结合后可实现如下功能:
(1)人工放置水线后采用图像识别的方法检测出水线,并计算出驾驶偏差,然后通过控制划线车的行进角度完成其巡线驾驶。
(2)可通过管理控制中心设置相关参数控制智能划线车启停。
(3)智能划线车自动划线:涂底漆、喷漆、喷玻璃滚珠,当施工人员发现路面需要清扫时可人工按键启动滚刷清扫和高压气体清扫。
为实现上述功能设计出了方案设计图,如图1所示系统主要组成部分:水线识别检测装置、智能驾驶车辆控制器、控制管理中心、动作执行气缸、划线装置、滚刷清扫装置、高压气体清扫装置、喷涂底漆装置、喷玻璃滚珠装置、放置水线装置等。
1.2 系统结构
本系统主要包括车辆控制中心、水线检测系统、转向控制器、交流电机控制器、动作执行系统、控制管理中心,控制中心通过通讯总线控制执行层的控制器。控制器以STM32单片机为核心搭建外围控制电路,实现了对车辆启动、停止、速度、转向及其划线动作的控制。水线检测系统采用摄像机获取水线图像,在上位机中采用图像识别的方法检测出水线,并计算出驾驶偏差通过串行总线发送给控制中心,然后控制中心通过CAN总线与转向控制器、交流电机控制器通讯,进而控制划线车的行进角度完成其巡线驾驶。动作执行结构以气压驱动电磁阀控制气缸动作,实现划线动作自动化。管理控制中心通过串行总线与控制中心通讯,实现状态监控、参数设置、模式切换等功能。自动划线车无人驾驶系统结构如图2所示。

图1 方案设计图
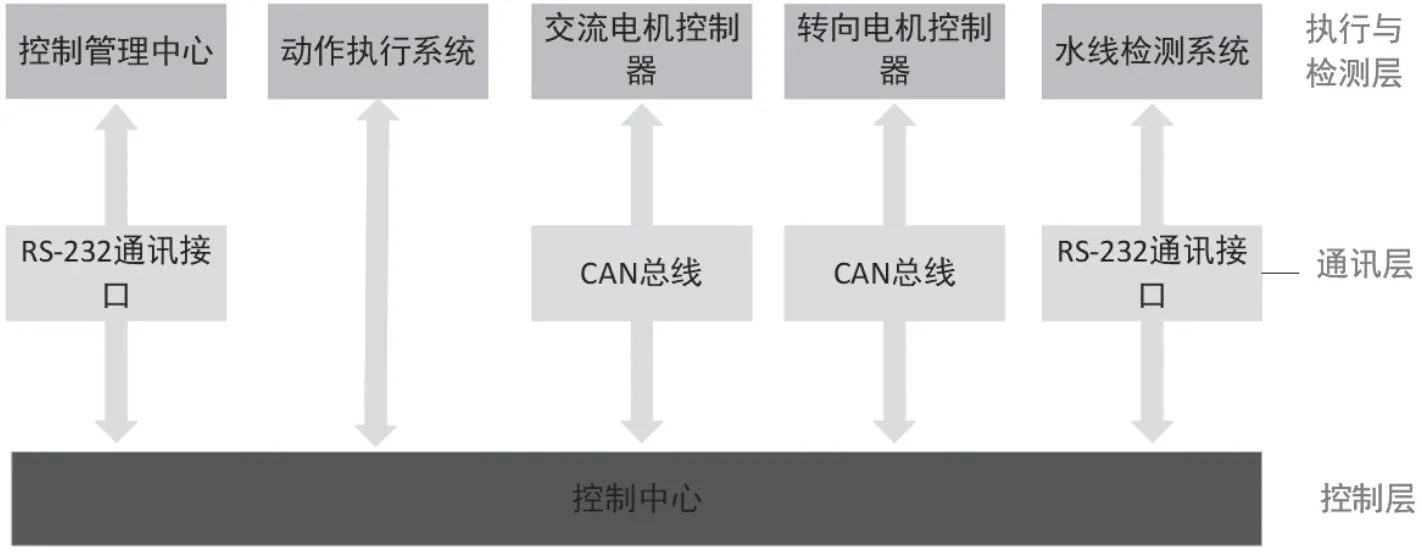
图2 自动划线车无人驾驶系统结构图
2 系统硬件设计
2.1 划线车自动化改造
自动划线设备的功能机构包括料桶闸开闭机构、划线料斗升降机构、料斗闸开闭机构、玻璃珠撒播离合机构,功能机构的动力均由压缩空气提供给执行气缸,由电磁阀控制气源通断。

图3 智能划线车控制系统结构图
2.2 控制中心
无人驾驶控制器以STM32F767单片机为核心,由电压转换电路、RS-232通讯电路、CAN通讯电路、数字量输入输出电路等外围电路组成。无人驾驶控制器通过CAN总线与车底盘控制系统以及转向控制系统连接通讯,实现对无人驾驶车底盘驱动、制动以及转向的控制,通过RS-232串行通讯接口与触摸屏连接实现人机交互。
3 检测系统与控制系统设计
3.1 水线检测系统
本文设计了一种图像驱动的导航与自动驾驶技术。水线检测设备由工控机和摄像头组成。工控机系统为win10,运行环境为MATLAB R2017b,工控机与摄像头的连接方式为USB连接。采用图像识别的方法检测出水线,并计算出驾驶偏差,工控机通过RS-232接口与车辆控制中心建立通讯发送偏差等信息,然后车辆控制器依据接收到的偏差控制划线车的行进角度完成其巡线驾驶。
3.2 控制系统系统设计
本文设计的智能划线车控制系统的主要作用是实现在无人驾驶控制器与车辆底盘控制系统、转向控制系统的信息交互以及控制器对动作执行气缸的控制,从而达到车辆实现无人自动驾驶自动化划线的目的。因此本智能划线车控制系统包括车辆底盘控制系统、转向控制系统、动作执行机构以及无人驾驶车辆控制器。控制系统的流程,如图3所示。
4 管理控制中心系统设计
4.1 系统框架(图4)

图4 管理控制中心系统框架
4.2 功能介绍
本控制中心用于高速公路智能划线车,主要用于智能划线车的控制与监视。主要功能包括四部分:无人驾驶自动划线管理、人工驾驶自动划线管理、人工驾驶人工划线管理。
(1)无人驾驶自动划线管理
控制中心的无人驾驶自动划线管理界面主要有状态及数据显示、车辆控制、模式设置、参数设置四种类型的功能。
(2)人工驾驶自动划线管理
人工驾驶自动化线管理界,主要功能为自动划线的开始与结束控制、虚实线切换、虚线长度与间距设置。该功能界面设计主要为使用者提供一种选择,去应对不方便使用无人驾驶时的施工。此模式保留自动划线功能,由人工驾驶施工。
(3)人工驾驶手动划线管理
人工驾驶手动划线管理界面,的主要功能是对各个划线工序的单步控制。此功能界面应对人工驾驶人工划线的使用场景,可单步控制所有换线动作。
结语:本文设计了一种基于图像导航的高速公路划线车无人驾驶系统,采用图像识别为划线车的巡水线自动驾驶导航,设计以STM32F767单片机一位核心的控制器通过CAN总线与转向控制器及行驶电机控制器通讯控制车辆自动驾驶,设计了自动划线功能执行结构实现划线车自动划线。但是本文设计无人驾驶系统还存在许多不足需要进一步完善,例如,目前只能喷涂直标线和弧度较小的弯道标线,下一步还需进行处理箭头、文字和曲线等方面研究。此外,采用的传统大津阈值分割,对大部分图像处理都能的得到较好效果,但是对于不太清晰或者污损过的水线,本算法不能保证每次都可以准确处理,还需要研究新的算法。如何去解决这些问题,进一步的完善这一划线车无人驾驶系统是接将来的研究方向。
猜你喜欢
作文小学中年级(2022年9期)2022-09-08 06:13:30
科学(2020年3期)2020-11-26 08:18:28
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
现代传输(2016年3期)2017-01-15 14:23:03
现代传输(2016年2期)2016-12-01 06:42:46
新农业(2016年5期)2016-05-23 03:14:59
城市道桥与防洪(2013年5期)2013-03-11 15:16:32
中学英语之友·上(2008年6期)2008-06-30 09:34:18