
三维激光扫描技术在大型复杂钢结构高空对接中的应用*
2021-06-01 10:56李文德黄韬睿
施工技术(中英文) 2021年8期
李文德,黄韬睿,徐 辉
(1.中国铁建国际集团有限公司,北京 100039; 2.精工国际钢结构有限公司,上海 201100)
0 引言
随着大众对建筑外形审美的不断提高和节能环保意识的增强,钢结构形式的公共建筑在国内外得到了广泛推广,其规模越来越大,结构形式也越来越复杂,传统的卷尺测量及全站仪测量等方法已不能满足复杂空间钢结构对精度控制的要求[1]。
三维激光扫描技术是一种先进的全自动高精度点云立体扫描技术,是继GNSS之后又一项革命性测绘新技术。该技术主要利用激光测距原理,即通过海量捕捉被测物体表面点的三维坐标、纹理、反射率等信息,获取其线、面、体三维数据,然后根据获得的测量数据构造出目标物的三维模型[2]。它是获取空间数据和空间状态的重要手段,可用于钢结构的变形检测、构件尺寸检查、结构单元数字化预拼装及逆向工程等方面。
1 工程概况
卡塔尔卢赛尔体育场项目为2022年世界杯主体育场。体育场内部看台部分为混凝土结构,屋顶为大跨度索膜结构,外侧幕墙及屋面支承体系为钢结构,屋面投影为圆形,直径约309m,最低处结构标高约61.000m,最高处结构标高约76.000m,整体呈马鞍形。主体钢结构由支承屋面索膜结构的受压环及支承受压环和幕墙桁架的V形柱(简称“V柱”)组成。地面拼装时,将受压环分为24榀吊装单体、V柱分为48榀吊装单体。吊装施工时,先吊装V柱,其与球铰支座和临时支撑塔相连,通过临时支撑塔上的位形调节机构对V柱的位形进行调节就位后,再吊装受压环与V柱对接。本文选取的高空对接单元为受压环与V柱。结构如图1所示。
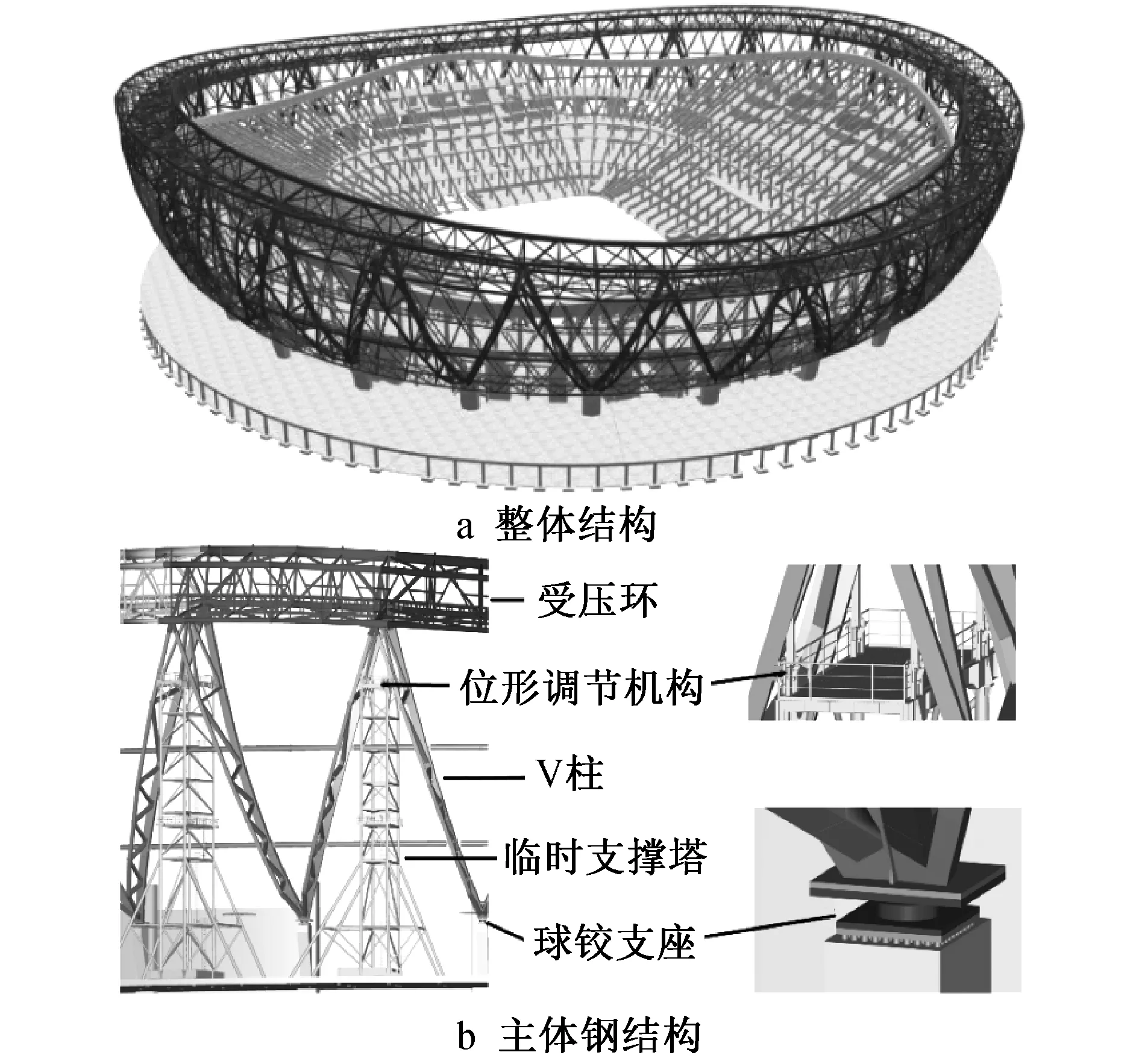
图1 卢赛尔体育场结构示意
2 高空对接测量方案选择
2.1 高空对接测量难点
1)受压环体形巨大,结构复杂。受压环由4根主弦杆构成箱形立体桁架,上下弦面内为“米”字形网格,整体几何形状与屋面马鞍面保持一致。单榀受压环由上百根杆件组成,以首榀吊装段受压环为例,长约46m,宽约18m,高约10m,重约425t,最大杆件截面为管外径1 600mm,壁厚50mm。受压环如图2所示。

图2 受压环
2)对接口数量多。首榀吊装段受压环坐落在4榀V柱上,对接口多达16个,对接口截面均为箱形且都倾斜,最大尺寸为900mm×1 500mm,板厚为28mm。受压环与V柱对接口如图3所示。
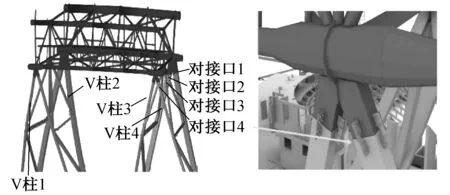
图3 受压环与V柱对接口
3)对接口空间位置高。所有对接口均为高空对接,高度距地面可达66m,定位测量困难。
4)精度要求高。本工程钢结构使用欧洲标准,对接口错边不可超过3mm,项目规范要求单点3个方向综合偏差不可超过±25mm,拉索耳板索孔位置3个方向综合偏差不可超过±20mm。受压环是连接屋面索膜结构和V柱的构件,其安装精度直接影响屋面索膜结构能否顺利安装。V柱是该项目主要的竖向传力结构,为受压环以及幕墙侧壁结构提供支承,其位形精度将直接影响幕墙是否能够顺利安装。
5)测量环境差。对接施工区域临时操作平台、脚手架多,视线阻挡较多,通过传统测量方式来提前判断对接误差及落位过程的碰撞问题难度大。脚手架及操作平台如图4所示。

图4 脚手架及操作平台
2.2 全站仪测量的局限性及误差分析
项目前期使用全站仪对已吊装的V柱进行测量,将反射贴片放置于顶端对接口3个边中点的正下方100mm处,为保证测量精度,对同一个点进行了多次多时段测量。以编号为4L的V柱为例,顶端对接口的全站仪测量数据如表1所示。

表1 V柱顶端对接口测量数据 mm
受压环合龙温度为(25±5)℃,为降低温度影响,避开当地中午的高温时刻,在早、晚温度约25℃时进行3次测量。通过测量数据对比,最大误差达15mm。精度无法达到项目规范要求。
为解决测距远、偏角大、测量人员主观误差的问题,考虑使用观测棱镜代替反射片作为测量靶标,使用全站仪的自动追踪功能来提高测量精度。此类型观测棱镜一般通过磁力吸附在钢结构上固定,但是对接口处受其他工作扰动较大,磁力吸附的稳定性不足。如果采用焊接固定,又有可能受焊接变形影响,且后期拆除恢复的工作量较大。初步进行成本测算,本项目若48榀V柱及24榀受压环全部安装棱镜,约需386万元人民币。综合考虑之下,最终决定使用三维激光扫描技术对已安装的V柱和地面拼装好的受压环进行扫描建模,通过虚拟对接,预判可能产生的对接偏差,在高空对接前及时调整。
3 三维激光扫描技术应用
3.1 设备选用
本项目选用FARO S150三维扫描仪作为现场扫描设备,有效测距为0.6~150m,距离精度为±1mm, 像素为165M,环境防护等级为IP54级。
3.2 三维激光扫描流程
根据本项目受压环和V柱对接口的特点,分别制定2套扫描方案: ①针对已吊装就位的V柱对接口扫描测量; ②针对未吊装的受压环整体扫描。2种方案均采用多站点组合扫描的方式进行。三维激光扫描流程如图5所示。

图5 三维激光扫描流程
数据采集环节是整个测量过程中最为重要的环节,需提前根据被测物体的体积、尺寸和所处环境来规划站点扫描路径。多站点扫描路径规划的好与坏将直接影响测量结果,注意事项如下[3]。
1)转站点之间的距离不宜过远,需保证相对较高的数据重叠度。
2)被测靶标需清晰可见,且保证各站点靶标的连续性,方便扫描数据预处理时的点位合并。
3)扫描仪站点需尽可能靠近被测物体,避开遮挡物,测量精度要求较高的,扫描仪与被测物之间的距离不宜超过50m。
通过相关软件对点云数据预处理后导出点云模型,并在软件中将BIM理论模型与点云模型拟合,本项目拟合采用以下方式: ①手动拟合 此拟合方式适合无空间坐标控制的被测物体,通过软件算法及配准原则,利用特征面进行点云模型与BIM理论模型的手动拟合; ②坐标拟合 此拟合方式适合在有项目整体坐标系控制的被测物体上,无须手动调整相对位置,即可自动匹配点云模型与BIM理论模型的拟合。
通过分析软件对拟合后的点云模型和BIM理论模型进行偏差分析,可提前判断偏差范围,为后续制定调整策略提供依据。
3.3 V柱对接口扫描
V柱坐落于混凝土柱上,桁架的内外弦通过腹杆形成半新月形、弯曲的三角形桁架格构柱,在环向,一系列的新月形弯曲桁架斜向布置,形成连续的V形框架系统。本文选取的V柱长约46m,顶部内外弦对接口距离约15m[4]。
项目前期未引入三维激光扫描,通过在测量点放置贴片使用全站仪进行测量。由于V柱与受压环对接口距离地面较高,导致测量时距离远且仰角大,测量数据准确性较差,且无法评估对接口的扭转情况[5]。
后期使用三维激光扫描技术,若将三维激光扫描仪放置于柱底地面,扫描仪与V柱对接口距离约为66m,且遮挡较多,扫描数据精度较低。经过多次实地考察测试比选,最终确定在扫描V柱对接口时,将三维激光扫描仪架设在V柱的临时支撑架塔顶,此时扫描仪距离V柱顶点约6m,满足精度要求,同时为减少温度影响,确保数据的准确性,扫描时间设置为20min。V柱对接口三维激光扫描点如图6所示。

图6 V柱对接口三维激光扫描
就位后的V柱已在项目整体坐标系内,其扫描结果分析时采用坐标拟合的方式。三维激光扫描前在柱身放置像测贴纸,使用全站仪测出像测点坐标。由于每次仅需测量相邻2榀V柱的像测点坐标,架站位置较灵活,有效降低了全站仪测量距离远、偏角大的问题,同时为了进一步提高准确度,每次扫描时设置8个像测贴纸,后续通过三维坐标复核的方法选取准确度最高的4个像测点[6]。
利用获取的4个像测点坐标将合成好的点云模型转换到整体坐标系内即可得到拟合结果。此方法可快速拟合分析出偏差结果,以编号为4L的V柱为例,分析结果如图7、表2所示。

图7 V柱对接口扫描点编号

表2 扫描得到的结果 mm
3.4 未吊装受压环扫描
本项目受压环体形巨大,整体几何形状与屋面马鞍面保持一致,是承载幕墙、连接屋面索膜结构和V柱的构件,受压环共分为24段逐个吊装,总重约6 200t。以首榀受压环为例,为保证扫描控制精度,根据受压环地面拼装形态,至少需设置18个扫描点位,扫描点位布置如图8所示。
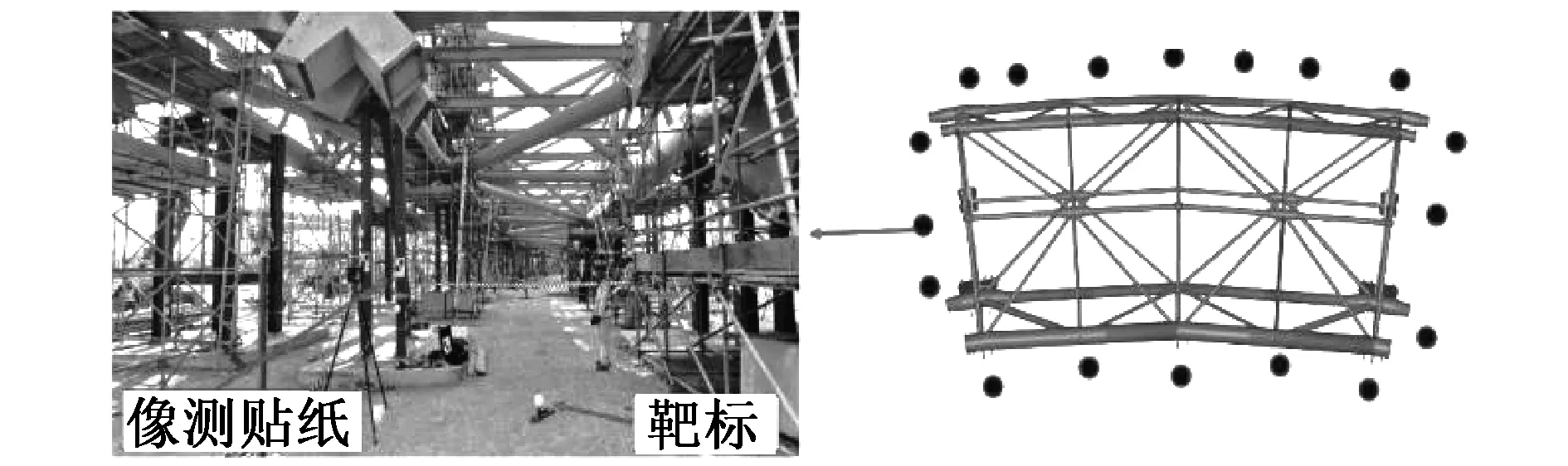
图8 受压环扫描点位布置
这样的点位布置可确保关键控制点位的特征面精度,且点云密度较高。通过软件对多个点位扫描进行合成验证,清理无用点云模型,设定配准原则,将清理干净后的点云模型再与BIM理论模型进行比对,拟合方式为手动拟合,通过计算机算法模拟出最佳匹配位置。
3.5 受压环与V柱模拟对接
分别获得V柱和受压环的实体扫描模型之后,将两个模型在软件中进行模拟对接。受压环的主要功能是连接和支承屋面索膜结构,因此拉索耳板索孔位置的精度需要优先保证。模拟对接时,首先要将拉索耳板对位在理论位置上,然后再在精度允许的范围内(±20mm)调整与V柱的16个对接口对接,尽量减小偏差[7]。以首榀受压环为例,其与V柱模拟对接结果如图9所示。
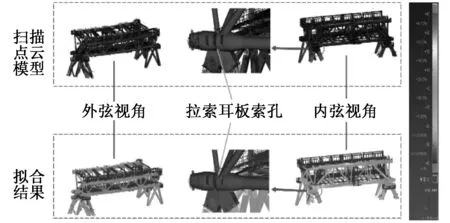
图9 受压环与V柱模拟对接结果
根据模拟对接的评估结果,编制V柱位形调整方案与受压环管口修整方案,在受压环起吊之前于地面完成受压环管口的修整,避免高空作业带来的安全风险。在实际的吊装对接过程中,实际情况与模拟对接的结果基本吻合,受压环与V柱的16个对接口全部在3mm的允许错边范围内,顺利对接。同时,3个耳板索孔的精度也都在±20mm的允许误差范围内,圆满完成首段受压环的安装。
4 三维激光扫描技术优缺点
结合三维激光扫描技术在本项目中的应用,将其与项目初期所用的传统全站仪测量方法进行对比,归纳总结出如下优缺点。
4.1 优点
1)受环境因素影响小 三维激光扫描采用非接触扫描目标的方式,无需反射片或棱镜,被测物无须表面处理,不受扫描环境时间和空间的约束。对于大型复杂结构及人员难以到达的情况,具有传统测量方式难以比拟的技术优势,可完成一些费力、高危险部位的测量,克服了传统测量方法测距远、偏角大、反射片或棱镜定位不准的难题。
2)扫描结果精度高 仪器采样率可达每秒数十万点,可快速获取高精度海量点云数据,使用计算机算法代替人工目视判别,避免了人为误差,数据精度可达毫米级,保证了后期的安装精度。
3)精简现场工作 全站仪测量时测量员需要长时间在现场工作,先测量再对照图纸最终确认偏差。三维激光扫描时操作人员仅需要放置靶标、像测贴纸和设置仪器,后续扫描工作可由仪器自动完成,且后期的数据处理和分析结果可在室内完成,降低了现场工作强度。
4)分析结果更直观 三维激光扫描最终得到的拟合结果具有可视化、数字化的特征,技术人员可以利用图像、视频及模型等方式对操作人员进行交底,可以更直观地指导现场施工。
4.2 缺点
1)三维激光扫描设备成本较高,需要专业人员操作,不便于现场高频次使用。
2)三维激光扫描仪在工作时需要有稳定的工作平台,且仪器与被测物之间距离不宜大于扫描仪标称工作半径的40%。
3)扫描数据后期处理及模型拟合所需时间较长。
5 结语
本文通过实际案例,证明了三维激光扫描技术可以应用在大型复杂钢结构高空对接施工中,其扫描精度可以满足测量要求,拟合分析结果可为现场决策提供数据支持。这项应用是钢结构现场施工领域的创新性突破,为后续建筑施工现场测量工作提供了参考依据,同时随着BIM技术在建筑业的发展,三维激光扫描技术将会更广泛地应用在钢结构制作及安装中,顺应装配式施工全面推进的时代背景。
猜你喜欢
建材发展导向(2022年20期)2022-11-03
现代仪器与医疗(2022年2期)2022-08-11
新型工业化(2022年5期)2022-06-17
建材发展导向(2021年22期)2022-01-18
建材发展导向(2021年15期)2021-11-05
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
中华建设(2019年12期)2019-12-31
模具制造(2019年3期)2019-06-06
现代职业教育·中职中专(2016年4期)2016-10-21
