对行开沟分层深施肥铲的设计与试验
2021-06-01 06:46刘进宝汤智辉郑炫杨怀君张鲁云孟祥金何兴村
甘肃农业大学学报 2021年2期
刘进宝,汤智辉,郑炫,杨怀君,张鲁云,孟祥金,何兴村
(新疆农垦科学院机械装备研究所,新疆 石河子 832000)
我国在农业生产中,长期依赖大量使用肥料达到增产的效果.但是由于当前施肥大都采用地表撒施、播种施种肥、中耕追肥等方式,作业环节较多,施肥技术落后,施肥模式不合理,导致肥料施用量大、利用率低,造成了土壤污染,增加了农业生产成本[1-4].
近年来随着卫星导航拖拉机自动驾驶技术的成熟推广应用,将肥料精准施在作物生长能吸收到养分的土壤范围成为现实.对行分层深施肥技术是将肥料一次性、分层施用在作物种行上,确保作物在不同的生长期都可有效吸收土壤中的养分,减少肥料施用量和施用环节,提高肥料利用率,实现作物在整个生长周期只施一次肥料,对农业生产节本增效有明显的促进作用[5-7].
相关研究人员对分层施肥技术模式及关键部件分层施肥器进行了大量研究[8-12].吴景贵等[13]对玉米分层施肥、浅施肥、深施肥进行了对比试验,结果表明分层施肥效果最佳.冯慧敏等[14]研制了一款小麦对行深施追肥机,对小麦对行深施追肥和传统撒施肥做了对比试验,试验表明对行深施追肥模式下,小麦增产486.5 kg/hm2左右.邹忠君等[15]对玉米分层施肥和常规分期施肥做了对比试验,结果表明,分层施肥使玉米增产12.1%.姚万生等[16]研制了一种分层施肥开沟器,进行了相关试验研究,结果表明可以将种子与化肥施播在不同深度的土壤层中.目前的分层施肥器存在不同类型土壤中施肥作业适应性较差,高速作业条件下阻力大,肥料分层效果不一致,上下两层肥料施用量不稳定及不可调等问题.
为此本试验提出了一种基于北斗导航技术的作物基肥机械化对行分层深施方式,设计了一种对行开沟分层深施肥铲,上下两层施肥口采用前后分置式,连接不同的排肥盒,使两层施肥量均可调,并且可以改变两层施肥口的前后距离,确保在不同类型的土壤中施肥作业时,有足够的空间与时间将两层肥料分别覆盖,达到肥料分层稳定的效果,提高对不同类型土壤施肥作业的适应性,科学合理施肥.
1 结构设计与工作原理
1.1 开沟分层深施肥铲结构
开沟分层深施肥铲是施肥作业的入土部件,可实现入土对行开沟和分层深施肥两种功能.由开沟铲部件和分层深施肥器两部分组成,分层深施肥器通过焊接方式连接在开沟铲上.其中开沟铲包括开沟铲柄、前刃板和铲尖,分层深施肥器包括浅层排肥管、深层排肥管、浅层排肥口、深层排肥口、导肥底板、挡肥板等,结构如图1所示.主要技术指标如表1所示.

1:开沟铲柄;2:前刃板;3:铲尖;4:挡肥板;5:深层排肥口;6:导肥底板;7:浅层排肥口;8:浅层肥管;9:深层肥管.1:Ditching shovel;2:Front blade board;3:Shovel tip;4:Fertilizer baffle;5:Deep fertilizer outlet;6:Fertilizer guide floor;7:Shallow fertilizer outlet;8:Shallow fertilizer pipe;9:Deep layer fertilizer pipe.图1 开沟分层深施肥铲结构图Figure 1 The structure picture of deep fertilizing shovel for furrow and layering

表1 主要技术指标
1.2 施肥模式
开沟分层深施肥铲主要用于施作物基肥,在播种前,利用卫星导航拖拉机自动驾驶技术,将施肥作业路径与下一步播种作业路径进行精确匹配,达到肥行与种行的精准对行.
目前许多作物都采用宽窄行种植模式,窄行行距为a,宽行行距为b.以西北干旱地区棉花和玉米种植模式为例,其中,棉花种植模式为窄行行距a=100 mm,宽行行距b=660 mm,根据棉花根系性状以及吸收土壤养分的范围,采用在窄行处两行种子对应一行肥料的施肥模式,即将肥料施在窄行a处的中心.玉米种植模式为窄行行距a=400 mm,宽行行距b=600 mm,采用每行种子对应一行肥料的施肥模式.施肥模式如图2所示.浅层施肥深度一般在100~130 mm,深层施肥深度一般在180~200 mm.
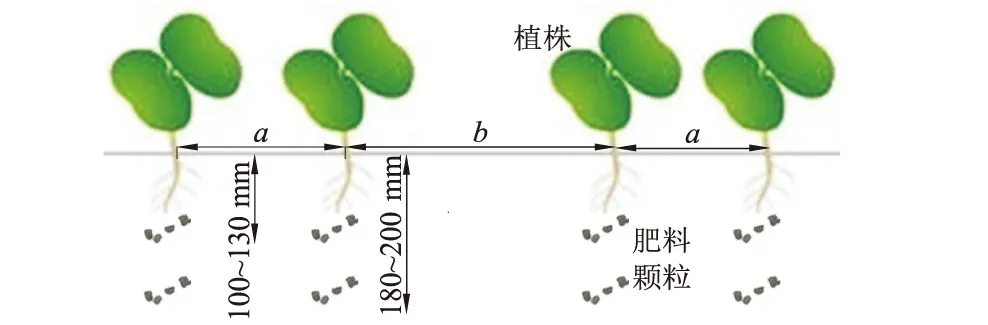
图2 种植及施肥模式Figure 2 Planting and fertilization model
2 结构分析
2.1 开沟分层深施肥铲受力分析
依据耕作土壤动力学模型[17],该结构开沟铲受力部分包括倾斜铲尖和圆弧铲柄两部分.
2.1.1 铲尖受力分析 倾斜铲尖受力部分如图3-A所示,土壤主要依靠剪切作用失效,根据图中的受力分析可得出倾斜铲尖在水平方向的平衡方程:
Fz=N0sinδ+μ1N0cosδ+Fb
(1)
式中:Fz为牵引力,N;N0为铲尖斜面所受法向载荷,N;Fb为土壤对铲尖的切削阻力,N;μ1为土壤与铲尖表面的摩擦系数,δ为铲尖入土角,(°).

图3 铲尖受力分析图Figure 3 Force analysis diagram of shovel tip
由于一般土壤的纯切削是很小的,只有遇到石头、树根等坚硬物时,切削阻力才较为明显,因此一般情况下,土壤对铲尖的切削阻力Fb可以忽略不计.此时分析倾斜铲尖上部土块受力情况,如图3-B所示,设土块在水平和竖直方向均处于平衡状态,便可得出土块在水平方向与竖直方向的平衡方程:
N0(sinδ+μ1cosδ)-N1(sinδ1+μcosδ1)-(FcSa+Fg)cosδ1=0
(2)
G-N0(cosδ-μ1sinδ)-N1(cosδ1-μcosδ1)+(FcSa+Fg)sinδ1=0
(3)
式中:G为土块自身重力,N;N1为作用于土块前失效面的法向载荷,N;Fg为土壤加速力,N;Fc为土壤内聚力,N;Sa为前剪切失效面面积,m2;μ为土壤内摩擦系数;δ1为前失效面的倾角,(°).
在此过程中土壤阻力Fz1与牵引力Fz为一对平衡力,结合公式(1)、(2)、(3)解得:
(4)
为简化上式,令:
(5)
则公式4可表示为:
(6)
其中土壤加速力
(7)
式中:m为被加速的土壤质量,kg;v为被加速土壤的速度,m/s;tg为加速时间,s.
由于槽型铲尖的松土范围是以铲尖为定点,以近45°角向两侧上方延伸的扇形面[17],因此,当前进速度一定时,牵引阻力大小主要由铲尖处对应的土壤体积决定,进一步分析可知牵引阻力根本决定因素是铲尖长度和入土角.
2.1.2 铲柄受力分析 根据西涅阿可夫关于切削部件作用于土壤后受力状态的力学模型理论[18],在耕深小于20 cm时,土壤主要表现为纯切削受力状态,铲柄受力如图4所示.根据铲柄在前进方向的平衡状态可得:

图4 铲柄受力分析图Figure 4 An analysis diagram of the force of a shovel handle

(8)
式中:Fp为作用在铲柄上的阻力,N;Nb1为铲柄楔刃上的法向力,N;Nb2为铲柄侧刃上的法向力,N;μ2为土壤与铲柄表面的滑动摩擦系数;δ2为铲柄楔角,(°).
其中:
Nb1=k1A1
(9)
Nb2=k2A2
(10)
式中:k1为土壤变形比阻;k2为土壤的比压;A1位铲柄楔刃的面积,m2;A2为铲柄侧刃面积,m2.
(11)
由于当前棉花种植区犁耕作业耕深一般在30 cm左右,犁耕后的土壤较为稀松,阻力相对较小,为了减小开沟阻力,设计铲尖入土深度H为25 cm,铲尖长度为12 cm,因此铲柄圆弧段入土深度为19 cm,由西涅阿可夫提出的土壤弹性和塑性变形原理得出:
(12)
(13)
结合公式(11)、(12)、(13)可以看出,当土壤特性和入土深度一定时,铲柄阻力大小主要由入土角、铲柄楔角、铲柄厚度和宽度以及铲柄圆弧半径和对应的圆心角等因素决定.
根据机械行业标准JB/T 9788-1999深松铲和深松铲柄标准,以及土质特点,取入土角δ为23°,铲柄选用扁钢60 mm×25 mm规格,铲柄楔角δ2为60°,铲柄圆弧半径r1为295 mm,圆心角φ为48°.
2.2 土壤扰动分析
由于土壤在空间分布状态的差异性、土壤的翻垡破碎及运动过程的复杂性,导致开沟铲在开沟作业过程中会对土壤产生一定的扰动作用,开沟后的土壤呈沟渠状,如图5所示.当开沟铲结构尺寸确定后,土壤扰动产生的沟型尺寸与作业速度有密切关系.

图5 土壤扰动沟型图Figure 5 Soil disturbance ditch pattern
为了研究土壤开沟过程的流动性和回落覆盖过程,选取了伊宁县青年农场耕整后的土壤作为测试对象,开沟速度设定为6 km/h,随机测量5次,求得测试平均值,初步测得开沟后土壤表层的尺寸分布,其中回土深度为间接测量数据,依据耕深与未回土区域的深度差计算,所得尺寸如表2所示.
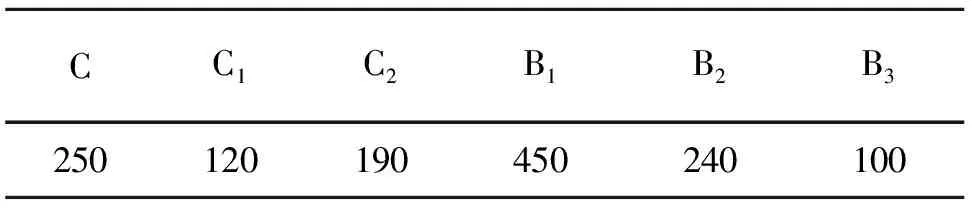
表2 土壤沟型尺寸
根据试验数据可以看出开沟铲对土壤的扰动影响比较明显,会产生较为明显的沟渠,需要进行覆土填埋作业,土壤回流效果也较为明显,回流覆盖深度超过浅层肥料的深度.
3 施肥深度稳定性分析
利用离散元仿真与田间试验相结合的方式分析施肥深度的稳定性.首先利用EDEM软件进行离散元仿真分析,利用Solidworks建立开沟分层深施肥铲三维实体模型,并且通过布尔运算简化模型,将模型导入EDEM软件,建立离散元仿真模型(图6).
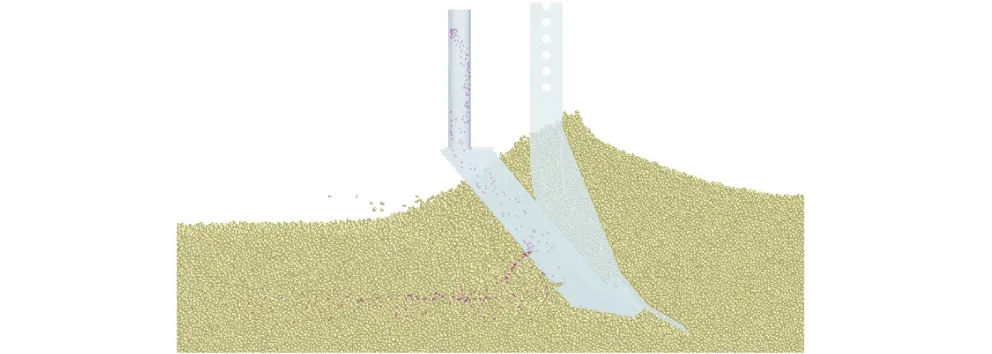
图6 EDEM仿真模型Figure 6 EDEM simulation model
采用系统默认的Hertz-mindlin(no-slip)模型定义模型中肥料颗粒间、肥料颗粒与土壤间、土壤与开沟器间、肥料与开沟器间的接触力学模型,依据相关研究[19-21],对土壤和肥料进行了基于离散单元法的参数标定.
确定了模型参数,如表3所示.

图7 土壤与肥料参数标定试验Figure 7 Calibration test of soil and fertilizer parameters

表3 全局变量参数设置
仿真时为方便观察肥料流动及分布情况,将土槽设置为透明,仿真运行后,得到如图8所示的仿真效果图.随机测量仿真数据见表4.

图8 仿真效果Figure 8 Effect of EDEM simulation
为了验证仿真效果,同时为确定开沟分层深施肥铲的田间工作性能,将开沟分层深施肥铲安装在由新疆农垦科学院联合科神公司研制的2FQ-5分层施肥机上,在伊宁县青年农场进行田间试验,试验效果如图9所示,随机测量试验数据见表4.

图9 肥料分层试验效果Figure 9 Effect of fertilizer stratification test

表4 试验数据
由仿真分析与试验结果可以看出,施肥深度比较稳定,深层肥料的深度仿真结果平均值为19.7 cm,试验平均值为19.5 cm;浅层肥料的深度仿真结果平均值为11.5 cm,试验平均值为11.8 cm.由此可见,施肥深度比较稳定,可以有效满足作业要求.
4 田间试验
4.1 试验条件
4.1.1 试验地理位置 伊宁县青年农场,田间地势平坦,肥力均匀.
4.1.2 试验作物 玉米.
4.1.3 化肥使用情况 化肥用量为20 kg/667m2,化肥为特拉华化肥贸易有限公司生产的磷酸二铵.
4.1.4 机具情况 配套动力雷沃欧豹TG1254,导航设备AG leader,施肥机安装6组相同的分层施肥铲,每个分层施肥铲的上下两个排肥口分别连接两个排肥盒,整机共设置12个排肥盒,每个排肥盒所在肥箱形成独立空间,便于监测排肥量.作业速度6.5~7.0 km/h.
4.1.5 试验时间 施肥作业于2019年4月8日~2019年4月25日进行.
4.2 试验设计
4.2.1 分层施肥铲施肥一致性试验 试验时每作业667 m2土地将肥箱剩余肥料称质量,机具作业幅宽为3 m,即机具每作业前进222.3 m时,利用肥箱总肥量减去剩余肥量,计算出6组施肥铲分别排出的肥料,重复5次试验测定,并且计算排肥过程的标准差和变异系数,通过计算样本数据的变异系数来判断试验数据的稳定性.
(14)
(15)
(16)
式中:Cv为变异系数;σ为标准差;N为样本数量;X为样本绝对平均值.
4.2.2 分层施肥与常规施肥对比试验 选取肥力相当的两块地作为试验田,一块作为传统撒施肥后深翻施肥方式,一块作为分层深施肥方式,分层施肥上下两层肥料施用量比例为4∶6,其他农艺措施相同.

表5 试验设计
4.3 结果与分析
4.3.1 施肥一致性试验结果 试验时施肥过程顺畅,施肥铲未出现拥堵现象,实际排肥量见表6.
通过计算,各行排量一致性的标准差σ=0.054 kg,各行排量一致性变异系数Cv=1.62%;每次总排肥量一致性标准差σ=0.206 kg,每次总排肥量一致性变异系数Cv=1.03%.排肥性能良好,能满足要求.

表6 施肥一致性试验结果
4.3.2 对比试验效果 在7月中旬籽粒成型期,测量玉米根系发育情况,分层施肥条件下的玉米植株,主根和毛根均发育良好;常规施肥条件下主根发育良好,毛根发育一般.通过调查玉米植株性状,得到表7测量数据.可以看出,对行分层深施肥单株质量较传统撒施肥单株质量多3%,单产增加8.74%.
通过对比试验可以看出,开沟分层深施肥铲的作业效果稳定,玉米作物对行分层深施肥技术和传统撒施肥相比,具有增产效果,产生的经济效益也较为突出.
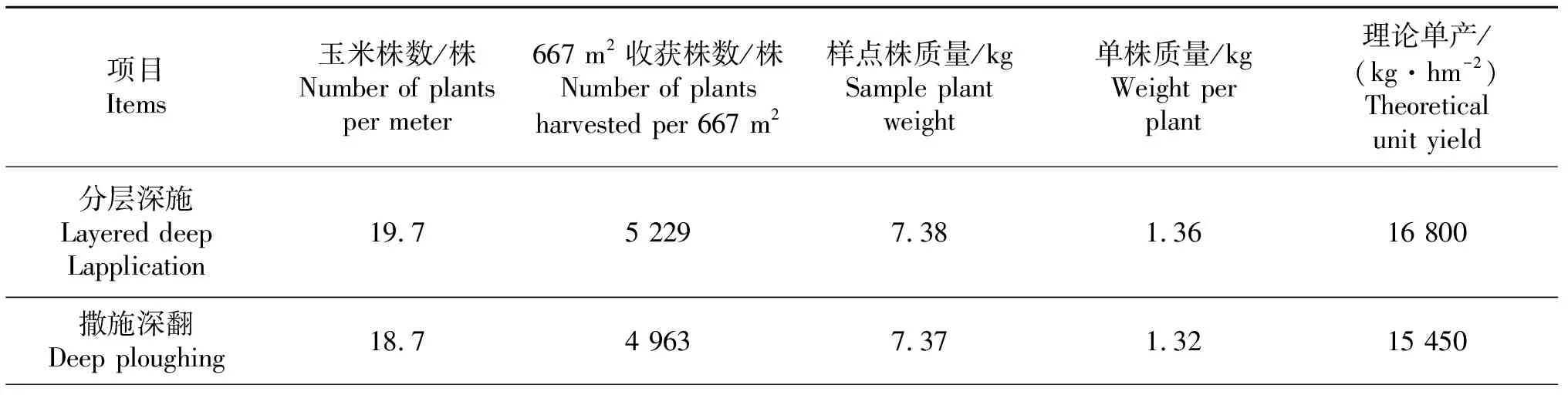
表7 玉米生物学性状调查结果

图10 玉米根系发育对比效果Figure 10 Comparative effect of corn root development
5 结论
1) 本研究针对当前施肥方式不科学、深施肥开沟阻力大、肥料分层覆盖效果不理想、不同深度肥料施用量不可调等问题,研制一种对行开沟分层深施肥铲,其结构简单,上下两层施肥口采用前后分置式,连接不同的排肥盒,使两层施肥量均可调,并且可以改变两层施肥口的前后距离,确保在不同类型的土壤中施肥作业时,有足够的空间与时间将两层肥料分别覆盖,达到肥料分层稳定的效果,提高了对不同类型土壤施肥作业的适应性.
2) 利用卫星导航拖拉机自动驾驶技术,将施肥作业路径与下一步播种作业路径进行精确匹配,达到肥行与种行的精准对行.棉花种植施肥模式为(66+10)cm宽窄行,采用在窄行处两行种子对应一行肥料的施肥模式.玉米种植模式为(60+40)cm宽窄行,采用每行种子对应一行肥料的施肥模式.从而实现对行分层深施肥的作业模式,达到提高肥料利用率,有效促进作物生长与增产.
3) 通过仿真和试验分析,分层施肥深度稳定性较好,仿真值与试验值接近,浅层施肥平均深度为11.8 cm,深层施肥平均深度为19.5 cm.田间对比试验表明,相对传统肥料撒施深翻模式,利用精准对行分层施肥技术对玉米的生长具有明显的促进作用,平均单株质量多3%,单产增加8.74%.
猜你喜欢
农业工程(2022年7期)2022-10-21
今日农业(2022年16期)2022-09-22
农业科技与装备(2022年2期)2022-07-13
今日农业(2021年17期)2021-11-26
果农之友(2021年4期)2021-06-29
新农业(2018年3期)2018-07-08
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
数理化学习·初中版(2011年9期)2011-11-14