
应用于GNSS天线的双频四馈等幅移相电路
2021-05-25 11:37李晓鹏邓淑珍
通信电源技术 2021年23期
李晓鹏,邓淑珍
(1.广州中海达卫星导航技术股份有限公司,广东 广州 511400;2.华南理工大学,广东 广州 510641;3.广东工业大学,广东 广州 510006)
0 引 言
随着导航技术的飞速发展,全球卫星导航系统(Global Navigation Satellite System,GNSS)已经被广泛应用于民用和军事领域,在导航、测量、定位、授时等方面也得到了广泛应用。目前,世界上有4大卫星导航定位系统,分别是中国北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)、美国全球定位系统(Global Positioning System,GPS)、俄罗斯格洛纳斯卫星导航系统(Global Navigation Satellite Systenm,GLONASS)和欧盟伽利略卫星导航系统(GALILEO)。随着国内外导航产业的不断发展,尤其是我国北斗卫星导航产业的兴起,人们对多系统导航的需求也随之增加。GNSS导航定位终端获得高精度定位信息需要配套高性能的多馈点馈电的圆极化天线来实现,例如可实现圆极化设计的微带贴片天线、多臂螺旋天线、对数周期天线等。为了满足兼容4大导航系统终端需求,天线的移相馈电电路须具有较好且稳定的性能[1,2]。
移相馈电电路主要是给天线提供所需振幅和相位,满足天线性能要求。其工作特性决定着天线性能,可以使天线指标达到最佳。按照馈电方式的不同,导航型天线获得圆极化特性方法大致分为单点馈电和多点馈电[3]。其中,单点馈电所需相位较差[4]。为了提高天线圆极化性能,可以采用多点馈电的方式,常见的有两点馈电与四点馈电,四点馈电一般比两点馈电的圆极化性能更好[5-7]。文献[8]采用微带线设计了一种串行馈电网络,该结构的馈电网络易造成各馈电端口功率分配不均匀且相位差不稳定,从而影响天线的圆极化性能。文献[9]提出了一种基于Wilkinson 等分功分器的四点馈电电路,输入信号经一分二Wilkinson等分功分器后接180°宽带移相网络,然后级联两个宽频带90°移相网络,这种基于Wilkinson微带线结构的移相电路抗干扰性较差,性能不稳定,同时对天线整体性能造成影响较大。
综上所述,本文基于3 dB分支线耦合器提出了一种带状线结构双频四馈等幅移相电路,具有抗干扰性强、性能稳定等优点。
1 移相电路结构设计
本文设计了一款支持全球卫星导航系统全部工作频点的双频四馈带状线移相电路,该电路整体结构布局如图1所示。
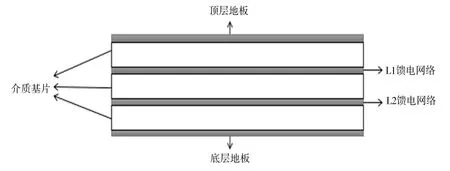
图1 移相电路整体结构
整个移相电路印刷在4层电路板上,介质板选用FR4材质,介电常数为4.4,厚度为1.2 mm。顶层和底层均为接地层,能够保证双频移相电路分别与低噪声放大电路和天线进行良好的屏蔽。中间两层上下依次为L1频段、L2频段的移相电路,两个频段的电路走线分布在不同的介质板平面上,走线区域外均做布设金属处理,并且两个频段电路走线进行交叉布设,有利于减小双频信号内部以及与外界信号间的相互干扰,大幅提升电路抗干扰性能。
定向耦合器是一种具有方向性的功率分配器,能从主传输线系统的正向波中按一定比例分出一部分功率,实现功率的分配与合成。3 dB分支线耦合器原理如图2所示。

图2 3 dB分支线耦合器原理
当端口1的输入信号功率为P、相位为0时,在直通端口2、耦合端口3得到的信号功率均为P/2,且直通端口2和耦合端口3的输出相位差为90°,同时没有功率耦合到隔离端口4。3 dB定向耦合器是一种特殊的定向耦合器,具有结构简单、性能稳定等特点,被广泛应用在各种移动通信电路中。基于3 dB分支线耦合器原理,分析L1频段和L2频段移相电路结构及其原理。L1频段的移相电路位于电路板第二层,其结构如图3所示。

图3 L1频段移相电路结构
该电路由1个第一级3 dB分支线耦合器、两个第二级3 dB分支线耦合器以及一段长度相差λ/4的带状传输线组成。本文 3 dB分支线耦合器由两段相对立的长度为λ/4且特征阻抗为50 Ω的带状传输线、两段相对立的长度为λ/4且特征阻抗为35 Ω的带状传输线以及隔离端50 Ω隔离电阻组成。
根据图3,以移相电路作为发射电路为例,信号输入端口Port1经第一级3 dB分支线耦合器进行移相90°等功率分路,对应两个输出端口分别接上长度相差λ/4且特征阻抗为50 Ω的带状传输线。在接入第二级3 dB分支线耦合器之前,使得两个输出端口间的相位差为180°,然后再分别接入第二级3 dB分支线耦合器进行移相等功率分路输出至Port2、Port3、Port4、Port5,最终得到Port2、Port3、Port4、Port5这4个输出端口信号功率相等且相位依次相差90°,根据实际需求可以实现左旋圆极化和右旋圆极化。假设端口Port1的输入信号功率为P且相位为0,则输出端口Port2、Port3、Port4、Port5对应功率值为P/4,且相位值依次为0°、-90°、-180°以及-270°,最终实现输入信号等幅移相分路。结合实际四馈点馈电的高精度GNSS天线,分别将Port2、Port3、Port4以及Port5这4个端口分别连接到L1频段天线单元对称的4个馈电点上,天线单元将空中微弱的右旋圆极化卫星电磁波信号转换成小信号,通过Port2、Port3、Port4以及Port5这4个端口进行等幅移相合路,最终进入射频前端电路进行放大滤波处理。通过等幅四馈点馈电电路设计,从而有效保障天线具有稳定的圆极化特性。L2频段的移相电路位于电路板第三层,其结构如图4所示。相应地,L2频段的结构与L1频段的结构与工作原理类似。

图4 L2频段移相电路结构
2 仿真与实测数据分析
根据上述移相电路结构和工作原理对电路进行建模仿真与优化,如图5所示。

图5 移相电路仿真模型
电路仿真优化完成后进行实物加工打样,电路板介质材料采用FR4,介电常数为4.4,损耗为0.02,最终得到实物如图6所示。

图6 移相电路实物
实物完成后进行调试与测试,对L1频段和L2频段移相电路输入端口S11、端口传输损耗、相位偏差等各性能指标进行分析。图7给出了L1频段内移相电路的|S11|仿真与实测结果均小于-18 dB,说明在L1工作频段内该电路具有良好的输入阻抗匹配特性。

图7 L1频段|S11|仿真结果与实测结果对比
图8给出了L1频段4个输出馈电端口仿真和实测的传输损耗对比。仿真结果表明4个输出馈电端口的传输损耗均小于7.5 dB,实测结果表明4个输出馈电端口的传输损耗均小于7.7 dB,实测结果与仿真结果基本吻合。

图8 L1频段传输损耗仿真结果与实测结果对比
图9为L1频段4个输出馈电端口的相位偏差。

图9 L1频段相位偏差仿真结果与实测结果对比
理想情况下,若以Port2作为参考,Port2、Port3相差-90°,Port2、Port4相差-180°,Port2、Port5相差-270°。从图9可以看出仿真与实测相位偏差均依次在-90°±3°、-180°±4°、-270°±4°以内,仿真与实测结果基本吻合,说明各输出馈电端口具有稳定的输出相位偏差。
图10给出的L2频段|S11|仿真与实测结果均小于-15 dB,说明在L2频段内移相电路具有良好的输入阻抗匹配特性。

图10 L2频段|S11|仿真结果与实测结果对比
图11为L2频段4个输出馈电端口传输损耗仿真与实测结果。仿真结果表明4个输出馈电端口的传输损耗均小于7.2 dB,实测结果表明4个输出馈电端口的传输损耗均小于8.2 dB。考虑加工误差,实测与仿真结果基本吻合且能够满足设计指标要求。

图11 L2频段传输损耗仿真结果与实测结果对比
图12给出L2频段4个输出馈电端口的仿真与实测的相位偏差。仿真结果表明Port2、Port3相位偏差在-90°±3°以内,Port2、Port4相位偏差在-180°±6°以内,Port2、Port5相位偏差在-270°±3°以内;实测结果表明各相位偏差依次在-90°±4°以内、-180°±5°以内、-270°±3°以内。经过对比分析,仿真结果与实测结果基本吻合且满足设计指标要求。

图12 L2频段相位偏差仿真与实测对比
如表1所示,本文所提出的移相电路与以往文献中设计的同等类型的移相电路参数比较如表1所示[10-12]。

表1 移相电路参数比较
由表1可知,在同等工作带宽且传输损耗基本相当的前提下,本文设计的移相电路具有更小的相位偏差值和稳定的相位特性,可以有效保障天线整机的圆极化特性。
3 结 论
本文设计了一款应用于高精度GNSS天线的带状线结构双频四馈等幅移相电路,通过级联多级3 dB分支线耦合器并采用L1频段和L2频段移相电路分层布局设计实现双频宽带特性。两频段分层布局设计有利于解决两个频段信号相互串扰的问题,通过将双频移相电路分别交错布设在多层板的内层,可将移相电路与低噪声放大电路和天线进行屏蔽,应用于GNSS有源天线时有利于电路屏蔽和提高抗干扰性能。实测结果表明,本文设计的移相电路具有较好的输入阻抗匹配特性和稳定的相位特性,能够使天线发挥稳定的圆极化性能,满足高精度GNSS天线设计和批量化应用要求,值得借鉴。
猜你喜欢
无线互联科技(2022年8期)2022-06-23
移动通信(2022年4期)2022-05-26
物联网技术(2022年2期)2022-02-22
西安航空学院学报(2021年1期)2021-07-24
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
科学家(2021年24期)2021-04-25
地震研究(2021年1期)2021-04-13
舰船科学技术(2021年12期)2021-03-29
舰船电子对抗(2020年2期)2020-06-23
舰船电子工程(2019年12期)2019-12-26
