
基于压力传感器下的智能分拣机器人的设计
2021-05-24 09:00王顺顺
电脑知识与技术 2021年12期
王顺顺
摘要:在智能机器人的研究领域,智能化和微型化的机器人将会是智慧生活的未来发展方向,而具有避障功能和智能搬运功能的智能机器人是在机器人领域的研究热点,在民用和军用领域应用前景广阔。近年来随着移动互联网的普及和发展[1],有效率地并且高速地解决生产需求的是现阶段智能化的主要任务,目的是解放更多的劳动力并且同时也可解决在生产中的许多低效行为,同样这些智能化设备也可以减少在生产中产生的成本,与此同时也可以节省时间的消耗。智能搬运机器人由此便诞生了,他的目的是更有效地为我们工作它可以代替人工进行货物搬运作业,对货物的分类,搬运和装卸的工作就此可以交给机器人来工作,它可以代替人工对一些危险的,有放射性的,以及有毒物质进行作业,切身实处为人工解决了许许多多的问题。有了他们的存在是保证了我们在危险作业时的人身安全。它是实现了自动化,智能化,无人化的将智能生活带进了我们的身边,该作品是使用单片机使机器人具有更简单的思维能力,利用压力传感器准确的识别物体的特性,将信息交由处理器进行分析,通过驱动系统和机械结构做出相应的反应。
关键词:智能化;单片机;压力传感器;机器人
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2021)12-0231-02
Abstract: In the field of robot research, intelligent and miniscale is the future direction of the robot, and the intelligent mobile device is a research hotspot in the field of robotics, which is widely used in the field of civil and military applications. In recent years, with the popularization and development of mobile Internet [1], an efficient solution to the production requirements and high speed is the main task of the intelligence, the purpose is to liberate more Labour and at the same time also can solve many inefficiencies in the production of behavior, these same intelligent device can reduce the cost in the production, at the same time also can save the time of the trumpet. Intelligent handling robot was born, his purpose is to more effectively work for us it can replace artificial cargo handling operations, the classification of the goods, transportation, loading and unloading of work can give this robot will work, it can replace manual for some dangerous, radioactive, homework and toxic substances, immediate effect for artificial solved many problems. Their presence ensures our personal safety in dangerous operations. It is to realize the automation, intelligence, unmanned intelligent life into our side, the work is the use of single chip microcomputer to make robot has more simple thinking ability, accurate pressure sensor characteristic of the object, will analyze the information to a processor, through the drive system and mechanical structure react accordingly.
Key words: intelligentize; singlechip; pressure sensor; robot
1 引言
分拣机器人是一种成本低廉、系统结构简单的自动化机器人,他们可以被广泛用在我们的生活周边,在工业生产领域上它们代替了人工,提高了生产的效率,对未定产品质量等方面是具有显著效果的,在人工手动切割的时候是存在主观上的一些问题,有时候稳定性上是存在很多的问题,但是使用了机器人操作基本上是不会出现这些问题,对于智慧物流在使用分揀机器人可以将快递入库这一工作显得更加的智能化,高效化,会解决许许多多的快递入库时产生的问题和遇见的困难,有了他们的存在不仅仅可以解放快递入库元的双手,同时会使快递入库更加准确、高效[2]。对于垃圾分类入箱需要使用到TensorFlow的垃圾视觉分拣机器人实验平台[3]来对垃圾分类,简单硬件无法对垃圾精准分类,分拣机器人的工作原理同样需要针对不同的环境下来设计,对直角坐标需要对机器人的设计方面的要求是不同的,他对精度和速度的要求室友精准的要求的,机器人会要求选择不同的方式去转动,一个自由度的关节对转动是有着极高的要求,一个自由度的影响不单单是一个小部分,更多的是一个整体的活动,同时也会更具特定的工艺工作环境选择不同的末端夹持工具,他们会有夹具,抓手和吸盘等,对于夹具使用的场景是一些不规则的小物品的夹持,需要牢牢地将物品固定到夹具上,而使用抓手的话就是大多在一些规则的物品上了只需要通过外观结构的特殊部分进行抓取会大大的节省对机器的消耗,在使用吸盘的话当夹持一些球状物时会使用此工具。从而使之能满足不同领域、不同工况的应用要求。此基于压力识别下的分拣机器人是通过压力识别传感器来对物品来进行分类,通过单片机来控制机械结构部分,并利用红外传感器完成循迹的功能实现,基本上的分拣机器人的结构大多都不是非常高外观比较固定化的一个框型外观参考图1。
2 需求分析
普通的分拣机器人是通过对成堆如山的快递一个一个的分拣,通过开始规划好的路线对物品进行分类,它们会将大小件不区分的进行入库管理,更像是自动化的方式来管理这快递和仓库的空间容积。而此基于压力传感器下的机器人会经过分类快递来入库,通过对于快递之间的尺寸和重量来区分各个快递之间的外形区别,进行一个简单的分类入库,通过这项操作让入库更加的智能化,一个仓库是可以被分为几个区域和货架,通过机器人小车的循迹功能最终将货物定点的精准的放置在指定的位置上。
3设计原理
要实现此基于压力传感器下的智能分拣机器人需要实现以下功能,压力传感器和机械结构之间的信息通过单片机来沟通,激光雷达循迹功能。
(1)压力传感器和机械结构之间的信息沟通
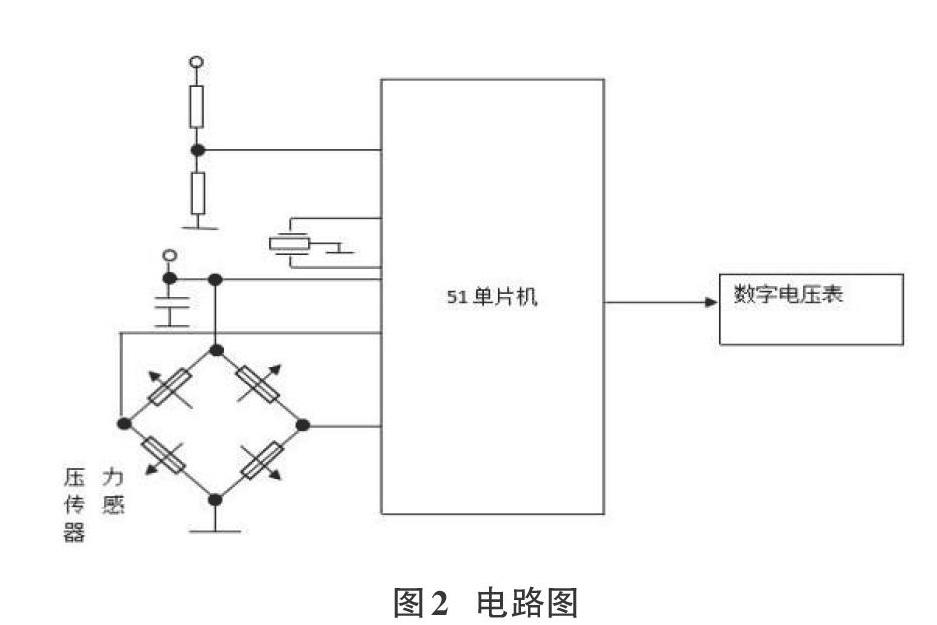
压力传感器是有检测和信息处理功能的它会感受压力信号,并且按照一定的规则将压力信号这种模拟量转换为一种数字量最后供控制器使用。当然当一个智能设备的设计不单单是处理器智能,而需要将各个部分都进行智能化,最终将各部分整合得到一个智能设备。由此就需要一个智能的压力传感器。智能压力传感器必须要对压力传感器的信号去进行一个信号预处理,由于需要测量的信号是多种的,输出信号由模拟量,数字量和开关量等,A/D转换的输入量并不单是压力传感器输出的压力值信号,这个模数转换器是将时间连续,复制虚的模拟量转换为离散的信号,那么由此就需要对电路传感器的输出信号建立出离散模型,并对这个离散模型的电压信号和周期信号进行处理。由此便需要对信息进行数据处理。
其中这个智能压力传感器是以51单片机为核心其部分设计如下所示,如下为其设计电路图。
(2)激光雷达循迹功能
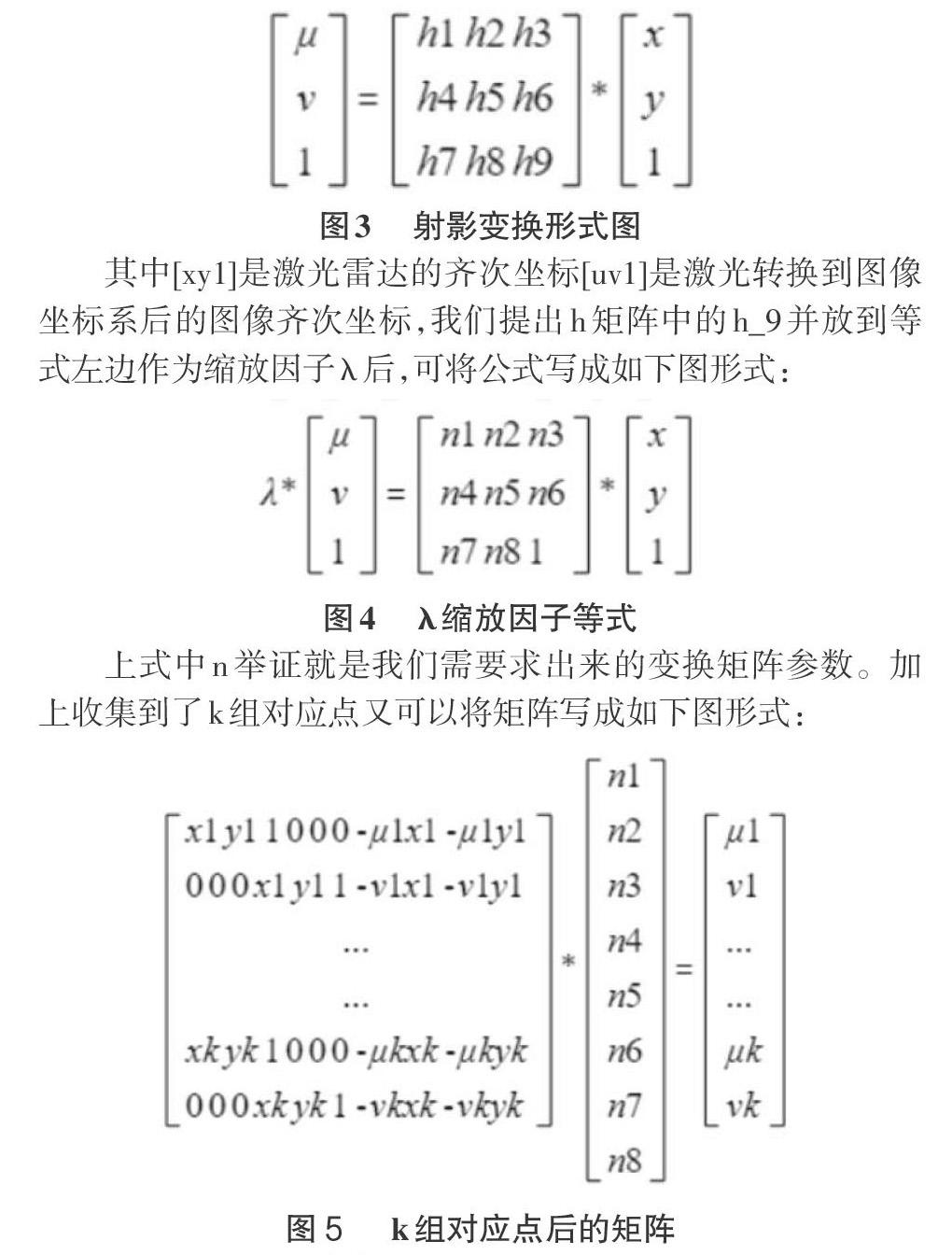
理论上激光雷达点要先从世界坐标系经过旋转、平移、缩放等变换转换到相机坐标,再乘以相机内参举证转换到图像坐标。但其实二维激光雷达坐标到图像坐标的变换可以更简洁地看成一个射影变换,二位激光的激光点就相当于俯视图,摄像头拍到的图像可以想象为主视图,而俯视图通过乘以一个单应居正变换到主视图的过程就是射影变换。转换的一般形式下图所示:
其中[xy1]是激光雷达的齐次坐标[uv1]是激光转换到图像坐标系后的图像齐次坐标,我们提出h矩阵中的h_9并放到等式左边作为缩放因子λ后,可将公式写成如下图形式:
上式中n举证就是我们需要求出来的变换矩阵参数。加上收集到了k组对应点又可以将矩阵写成如下图形式:
至此基于压力传感器下的分拣机器人的设计中的两个核心功能部分得以实现,他们保证了分拣机器人在物流分拣入库这样的环境下工作。
4 结语
本文介绍的是一种基于压力传感器下的分拣机器人,所设计的分拣机器人的核心功能分为两部分第一部分为压力的模拟量输入然后通过压力值来给机器人的机械机构部分做出相应的动作,第二部分是雷达循迹功能的实现。目前市场上的物流分拣的场合也是迫切地需要用到分拣装置,所以通过此基于压力传感器的智能分拣机器人对物流行业的工作人员是有帮助的。
参考文献:
[1] 闫妍,陶美春.基于A*算法的搬运机器人路径规划——以菜鸟智能仓为例[J].物流科技,2020,43(11):160-166.
[2] 李欢.快递入库智能分拣机器人系统[J].科技创新与应用,2020(5):39-41.
[3] 吴蓬勃,姚美菱,王拓,等.基于TensorFlow的垃圾分拣机器人設计[J].实验室研究与探索,2020,39(6):117-122.
【通联编辑:梁书】
猜你喜欢
军事文摘(2022年19期)2022-10-18
印刷工业(2020年4期)2020-10-27
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
中国交通信息化(2017年4期)2017-06-06
电子设计工程(2015年15期)2015-02-27
