
基于ZigBee的智能滴灌控制系统
2021-05-24 10:34刘悦沆熊瑞平陈贵全徐毅松
物联网技术 2021年5期
刘悦沆,熊瑞平,陈贵全,彭 博,徐毅松
(四川大学 机械工程学院,四川 成都 610065)
0 引 言
近年来“精准农业”的概念在全国范围内大力推广,精准农业的有效实现取决于农业灌溉技术的发展,其中农业滴灌的方式日趋流行,实现智能化滴灌是主要研究内容[1]。国内外大部分农业地区仍采用传统滴灌模式,不仅布线复杂,往往还会因为电力传输的损耗或电缆接触不良等问题导致滴灌无法正常进行[2],同时传统滴灌模式的滴灌水量依赖于人工控制,导致水资源利用率低下,浪费较大,运行成本高。
现如今,无线传感技术ZigBee发展迅速,它具有功耗低、成本低、网络节点容量大、组网方便快捷等优点[3],数据能够通过ZigBee协议进行无线传输,解决了因环境复杂而导致的布线困难问题;模糊控制智能算法参考了专家经验建立了模糊控制规则[4],系统能够自动决定滴灌水量和滴灌时间,智能化程度较高,减少了人工干预,适用于类似滴灌系统的控制系统;上位机软件LabVIEW具有可视化的图形式编程语言[5],能够在较短时间内开发出一套简洁、明了、易操作的上位机软件,方便相关人员学习上位机软件的操作。
1 系统总体设计
智能滴灌控制系统主要由现场ZigBee网络、监控中心、远程用户组成,系统结构示意图如图1所示。

图1 智能滴灌控制系统结构
系统分为三层结构。
底层的现场ZigBee网络是由若干个ZigBee现场节点组成,ZigBee现场节点能够采集现场的土壤湿度、大气温湿度、光照强度等信息,接收控制命令控制各区域电磁阀的开闭,以此实现各区域滴灌功能的开启与关闭。
系统的第二层为监控中心,监控中心能够实时监控温湿度、光照强度、电磁阀状态等现场数据,并将现场数据存入数据库,同时还能够通过智能算法自动发送控制指令,控制各区域滴灌功能的开启或关闭。
第三层的远程用户能够在各地使用不同设备登录监控软件服务器查看监控中心实时数据。
现场ZigBee网络通过ZigBee协议使得各节点能够通信,进行数据交流,并能同时与监控中心上位机接入的ZigBee模块通信,从而进行现场与监控中心的数据交流。上位机软件通过互联网接入云服务器,远程用户可以在不同设备上通过监控软件接入云服务器查看现场实时数据。
1.1 ZigBee现场节点
ZigeBee模块相比WiFi和蓝牙模块能够容纳更多的组网节点,功耗与后期维护成本低,且能够通过AT命令自组网,自动选择最优路径传输数据[6],使得ZigBee模块成为智能滴灌控制系统的最优选择。ZigBee网络节点结构如图2所示。

图2 ZigBee网络节点结构
ZigBee网络节点的主控芯片选择AT89S51的8位MCU,通过TTL转串口的方式与ZigBee模块CC2530通信。
节点供电采用多晶5 V太阳能电池板,可提供的峰值电流达60 mA,能够满足ZigBee网络节点正常工作的需求。
土壤湿度检测采用TELESKY 5 V土壤湿度传感器,该传感器的叉型设计能方便插入土壤,其表面采用镀镍处理,加宽了感应面积,提高了导电性,能够防止传感器接触土壤而生锈,延长了仪器的使用寿命。传感器输出和单片机的A/D模块相连,通过A/D转换可以精确检测土壤湿度。
大气温湿度采用DHT12数字式温湿度传感检测,此传感器是一款含有已校准数字信号输出的温湿度复合型传感器,通过I2C与单片机通信。
光照强度传感器选择BH1750FVI光照小球传感器,它能够直接进行数字输出,省略了复杂的计算过程,模块内部包含电平转换,与单片机I/O口连接就能获取准确的光照强度数值。
系统采用能够进行自保持的ZCZ58-50B电磁阀,这种电磁阀只在需要开启或关闭时消耗一点电能,工作电压为12 V,供电采用2个6 V的多晶太阳能板串联为其供电。
1.2 监控中心
监控中心主要由上位机软件、数据库、PC机组成。监控中心的上位机软件采用LabVIEW图形式编程语言开发,用户可以在监控中心上位机软件中对现场各滴灌区域的土壤湿度、大气温湿度、光照强度、电磁阀状态、滴灌时间等数据进行实时监控与管理,监控中心也可以通过模糊控制智能算法自动或手动向现场电磁阀发送控制命令。以上数据均按日期编号,存入ACESS数据库,用户可以通过上位机软件访问查询历史数据,掌握植物生长的整体情况。监控中心的功能如图3所示。
1.3 远程用户
监控中心的上位机软件接入云服务器,将现场数据同步到云服务器中,基于Windows和Android系统将监控软件安装在远程用户的电脑或智能手机上,用户登录接入云服务器的监控软件便可以获取现场数据,对现场进行实时监控。
2 模糊控制智能算法
2.1 模糊控制的结构设计
在传统的滴灌系统中,都是人为控制电磁阀的开启与关闭,对滴灌的用水量缺少精确把控。在智能控制系统中,需实时监控现场数据,系统根据反馈的数据进行智能算法分析,从而对系统的输出做精确调整,达到高效的滴灌状态。但目前大多数算法均通过已知的数学模型建立,一旦系统运用在农业滴灌中,不确定性、波动性、滞后性较大,因此建立精确的数学模型难度较大[7]。模糊控制智能算法无需建立精确的数学模型,它是基于专家经验和相关知识建立起来的控制器,能够模仿人的思维方式决策[8]。目前在关于滴灌的模糊控制之中,大多只将当前土壤湿度作为模糊控制的输入量,但作物的生长需水情况不仅仅要考虑当前土壤湿度,还包括土壤自身水分的蒸腾量、渗漏量、降雨量等,这些因素都直接或间接影响土壤湿度,从而影响植物从土壤之中能够获取的水分。外界因素对土壤湿度的影响可以用土壤湿度的变化率表示,所以将模糊控制器的输入量设置为土壤湿度和土壤湿度的变化率。
建立二维输入单输出模式的模糊控制器,二维输入量分别为土壤当前湿度En与土壤湿度的变化率H,输出变量则为滴灌电磁阀开启的时间T。模糊控制器为相关专家经验建立起模糊控制规则以及模糊推理结果的解模糊化。模糊控制大致结构如图4所示。

图4 模糊控制结构
2.2 模糊控制的实现
MATLAB 2018中的Fuzzy Logic Toolbox提供了丰富的模糊控制相关函数与组件,通过相关函数与组件向导式编程,可建立智能滴灌的模糊控制智能算法。
借助MATLAB部署工具(Deployment Tool)将模糊控制智能算法打包成库文件,生成.NET Framework程序集。上位机软件LabVIEW提供丰富的API接口,支持.NET外部互联功能。LabVIEW编写的上位机软件借助现场传感器检测的数据与模糊控制智能算法便可计算出最终的滴灌时间,发出准确的滴灌命令。
3 系统程序实现
基于ZigBee的智能滴灌系统中的监控中心能够实时监测ZigBee现场网络的数据并向ZigBee现场网络自动或手动发送滴灌控制命令。系统控制分为自动滴灌模式和手动滴灌模式,自动滴灌模式下系统每5 min对数据进行一次采集整合计算,刷新滴灌时间;手动模式是指由操作人员手动控制各区域电磁阀。系统程序流程如图5所示。

图5 系统程序流程
为方便相关人员操作该智能系统,设计的监控中心上位机界面简洁、易操作。
用户可随意切换自动滴灌模式和手动滴灌模式,界面上的4个区域分别代表实际农田中划分的4个滴灌区域,每个区域可分别监控其传感器数据和滴灌功能的开闭。
自动滴灌模式界面如图6所示。
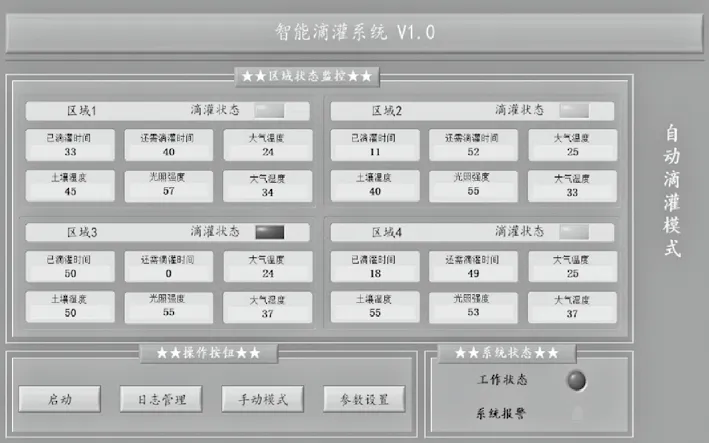
图6 自动滴灌模式界面
手动滴灌模式界面如图7所示。

图7 手动滴灌模式界面
4 结 语
通过对基于ZigBee的智能滴灌系统的设计与研究,可以得到以下结论:
(1)通过ZigBee协议进行现场与监控中心的无线数据传输与控制命令发送,减少了系统布线,能使系统运行更加稳定,提高了滴灌系统的灌溉效率;
(2)模糊控制智能算法结合专家经验能够自动决策田间的滴灌时间,减少了人为干预,极大程度减少了农业水资源的浪费;
(3)智能滴灌系统的现场数据均可在监控中心或远程用户智能设备上的监控软件中实时监控与查看,实现了数据在线监测,符合智能农业的理念。
猜你喜欢
大电机技术(2022年1期)2022-03-16
中国海上油气(2021年2期)2021-06-09
天津农林科技(2020年3期)2020-08-13
电子制作(2019年15期)2019-08-27
数码世界(2017年5期)2017-12-29
价值工程(2016年32期)2016-12-20
铁道通信信号(2016年12期)2016-06-01
测绘科学与工程(2016年5期)2016-04-17
高原山地气象研究(2016年4期)2016-02-28
高原山地气象研究(2016年4期)2016-02-28
