
基于STM32智能轮椅的控制系统研究
2021-05-24 10:34蒋欣雨赵博洋王曼瑶
物联网技术 2021年5期
蒋欣雨,赵博洋,王曼瑶,何 杰
(安徽理工大学 电气与信息工程学院,安徽 淮南 232001)
0 引 言
随着物联网技术和医疗技术的快速发展,为了更好地服务老年人和体弱病残者,帮助他们回归正常生活,减少心理压力和家庭负担,也为最大限度节约制造成本,各国都在积极研发智能轮椅。目前,智能轮椅代替了手摇式轮椅,很大程度解决了活动范围小、自主性低等问题,在日常生活中扮演着越来越重要的角色。然而,国内对电动轮椅的研究技术依然远远落后于国外,这导致市场上智能轮椅售价昂贵,普通家庭难以承受。因此,积极研究实惠可靠的智能轮椅,对于代替进口和引领国内技术研发具有重要作用。
本文设计的智能轮椅控制系统以STM32为控制核心,集合物联网和自动化技术,实现轮椅的可操控性、自动感知、可靠控制、无线通信等功能,使轮椅具备较好的自主性、适应性。根据智能轮椅自身的特点,使多种人机交互方式在同一控制系统中共存,达到灵活便捷的操作目的。系统加入了紧急刹车和紧急避障功能,优化控制方式,实现智能轮椅在复杂环境中的避障控制[1-2]。
1 系统结构
智能轮椅有关控制系统方面的结构如图1所示。
图1所示的系统主要由驱动控制器、故障检测模块、手操器模块、双陪护控制器、人机交互模块、微控制器、通信模块等组成。

图1 智能轮椅控制系统结构
人机交互方式包括操纵摇杆、按键控制、语音控制、肌电控制等,多种人机交互方式在同一控制系统中共存,操作灵活、便捷。
主控芯片从性价比、性能、成本、设计需求、推广性等方面综合考虑后,选择STM32系列和M68HC12系列微控制器,其集成度高、性能稳定、成本低廉。
通信方式采用有线CAN和无线WiFi相互配合,保证信息传输的可靠性和便捷性。系统还加入了紧急刹车和紧急避障功能,进一步避免了使用者因环境因素、操作不当、意外情况等不可控因素而造成意外碰撞跌落事故[3-5]。
2 硬件电路设计
结合智能轮椅关于控制系统的硬件需要,选择可进行大量运算,功耗低,具备完整硬件性能的控制芯片系统,经查询,筛选后选择STM32F103RBT6和MC9S12DG128作为主控芯片。这两款芯片具备高效处理信息的能力,拥有充足的存储空间。所有外围电路均与主控芯片相连,主控芯片对其进行数据处理和控制[6-7]。
2.1 手操器
手操器的主要按键包括电源开关按键、速度加减按键、喇叭按键、紧急制动按键等,具有按键锁定指示、陪护指示、故障指示等功能,模块主要分为摄像头模块与CAN通信模块。
2.1.1 摄像头模块电路
为确保轮椅使用者的安全,需要确保实现智能轮椅的紧急刹车功能。本文设计中借助手操器的摄像头模块作为图像传感器,辅以相应的软件控制算法,从而保证在紧急情况下智能轮椅能够紧急刹车。在这个模块中,摄像头采集道路上的信息,一旦检测到障碍物,则立即传递信息给微控制器,再通过相应的控制算法实现相关功能[9-10]。摄像头采样电路如图2所示。
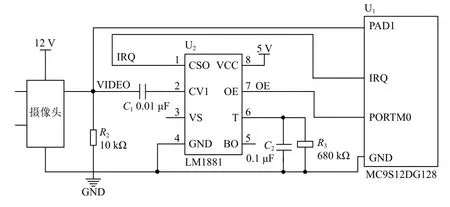
图2 摄像头采样电路
摄像头视频信号端与LM1881的视频信号输入端相连,同时也与MC9S12DG128 A/D转换器的PAD1相连。LM1881的引脚1与MC9S12DG128的外部中断IRQ端口相连,LM1881的引脚7作为奇-偶场同步信号输出端与MC9S12DG128的普通I/O端口(选择PORTM0)相连。
2.1.2 CAN通信模块
为提高芯片的集成度并降低功耗,此次设计中用于有线传输数据的CAN总线控制器采用LVTTL逻辑电平,为了达到优化系统的效果,选择需要3.3 V电压供电的8脚CAN收发器SN65HVD230。CAN 通信模块的接口电路如图3所示。
图3中,R3和R4具有限流电阻的作用,上拉电阻R1和下拉电阻R5协作搭配使用,可以一定程度上起到抑制反射波干扰的作用,通过这种方式可以增大信号的幅值,提高信噪比,降低误码风险。
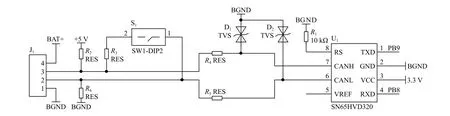
图3 CAN通信模块的接口电路
2.2 电机驱动模块
通过调查发现,目前市场中销售的智能轮椅超过一半为直流有刷电机,因此将直流无刷电机用作执行器的智能轮椅具有广阔的发展前景。本设计采用的直流无刷电机具有效率高、寿命长、电磁干扰小和结构简单小巧等优点,可满足市场需要。
已知驱动控制器是在接收信息且控制算法运算完成后输出PWM波,以此达到对左右2个电机进行控制的目的,故驱动控制器的电机驱动电路需使IR2184驱动芯片和IR1404相互配合,搭建合适的驱动电路实现对左右电机的驱动,如图4所示。
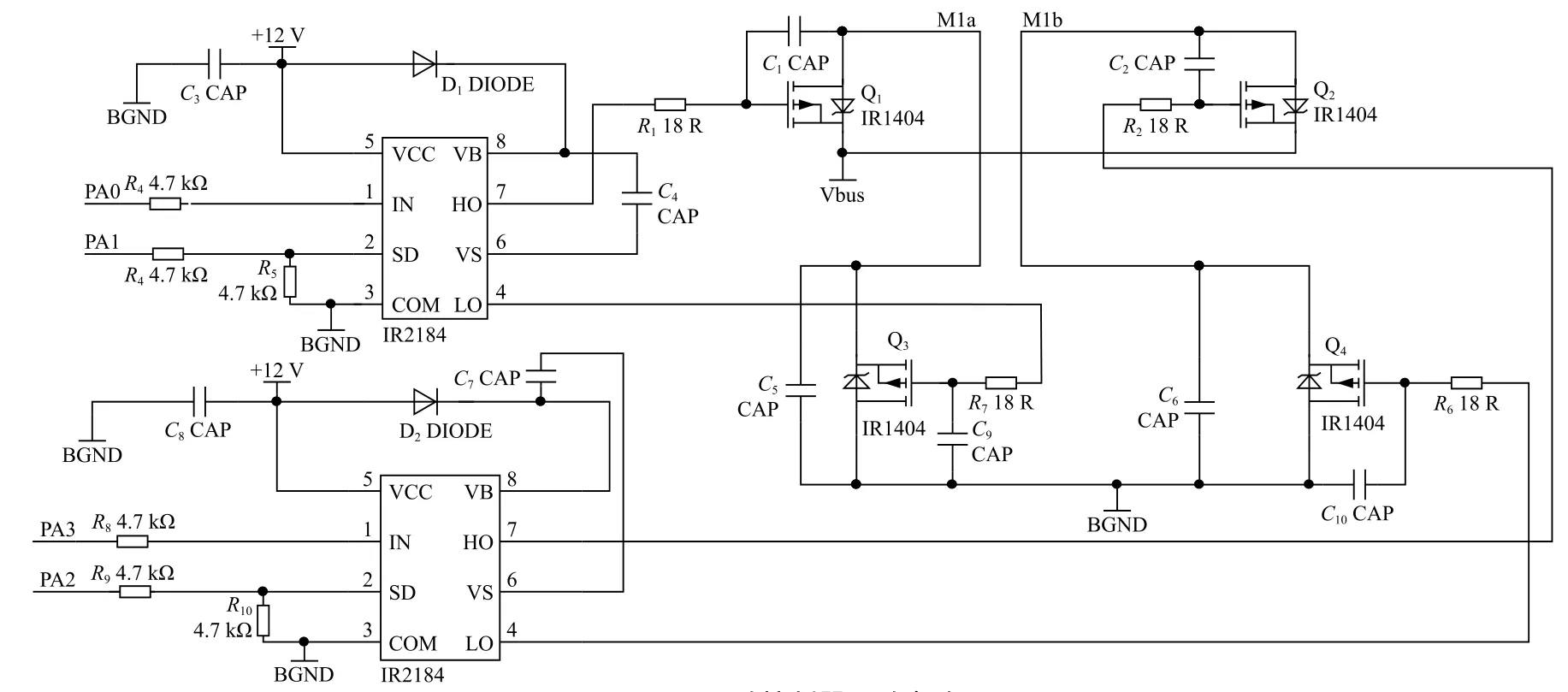
图4 驱动控制器驱动电路
3 双陪护模块
双陪护模块作为一个独立且需要对电机驱动控制器进行实时准确控制的模块,它选定并采用的主控芯片必须满足以下条件:
(1)为双陪护控制器与电机驱动控制器之间的信息传递提供硬件支持;
(2)具有一定数量的普通GPIO口。
经过考虑,采用STM32F103RBT6(36引脚)作为该控制器的主控芯片,电路如图5所示。

图5 显示电路
图5中,电路采用共阳极接法,将7个LED灯连接到主控芯片的PA4~PA10引脚,放弃芯片级联以获取更多I/O端口。利用按键K1~K4控制发光二极管,其中,K1为增速按键,K2为减速按键,K3为速度固定按键,K4为轮椅控制权转换按键。
4 软件设计
控制系统的主程序流程如图6所示。主程序,别名主函数。此函数是程序运作的开端,也是系统运行的程序基础。系统主要完成硬件初始化、循环接收控制命令、控制电机运行、执行相应的紧急刹车中断程序等任务。

图6 系统主程序流程
5 结 语
本文所设计的智能轮椅控制系统以STM32为控制核心,集合物联网和自动化技术实现轮椅的自动感知、可靠控制、无线通信等功能,使轮椅具备较好的可操控性、自主性、适应性。本文给出了系统的整体结构及部分硬件电路和软件设计流程图。该控制系统以STM32F103RBT6为主控芯片,采用模块化设计思想,具有清晰度高、逻辑性强等特点,打造了一个低损耗的控制环境,可实现轮椅功能的多样化,同时满足轮椅使用者的不同需求。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
电子制作(2021年3期)2021-06-16
数学小灵通·3-4年级(2020年3期)2020-06-24
新世纪智能(高一语文)(2019年10期)2020-01-13
电子测试(2018年13期)2018-09-26
天津诗人(2017年2期)2017-11-29
电子制作(2016年1期)2016-11-07
爆笑show(2015年5期)2015-07-09
家电科技(2013年4期)2013-07-09
