新型双体式海洋清理平台设计
2021-05-23 13:12曹文鹏金星刘灿李阳阳李伟嘉郭怀睦
科学与生活 2021年5期
关键词:单片机
曹文鹏 金星 刘灿 李阳阳 李伟嘉 郭怀睦

摘要:新型双体式海洋清理平台是为了改进人工打捞的不足而设计的,可以在很大程度上提高固体垃圾的收集效率、扩大收集范围,减少人工成本,降低人员的工作强度。能够实现寻找、识别各种漂浮于水面的垃圾,锁定目标并收集、粉碎。有多种工作模式适用不同的海域。这款设备将大大提高海洋垃圾清理的安全性和高效率性。节约大量的人力和物力资源,切实解决海域垃圾打捞难题。
关键词:新型双体式海洋清理平台;单片机;收集装置;
1引言:
当前海洋污染给人们的生产生活、社会生态环境都带来了非常严重的影响,越来越受到社会的普遍关注。目前清理海洋垃圾主要靠人工进行打捞,人力物力耗费巨大。海洋环境多变,清理过程中非常容易发生事故。人工清理垃圾的效率比较低,一个熟练的工人一天只能清理300平方米的海域,劳动强度大,较危险。本文设计新型双体式海洋清理平台来解决此问题。
2新型双体式海洋清理平台工作原理:
基于工作环境的复杂性,本设计采用双体式船体结构,用单片机作为核心控制,利用两个螺旋桨的正反转,转向舵机的配合控制,实现新型双体式海洋清理平台的前进后退、左移右移等功能。结合收集装置、传送装置、粉碎装置对海面进行全方位清理。结合外部传感器实现场合有向运动,实现清理有序工作。
当需要清理海洋垃圾的时候,该机器人可以通过装在电路箱11中的无线控制系统远程操控机器人或预先设定范围自动清理,将动力推进装置9启动,带动螺旋桨15旋转,机器人在水面上行走,通过转动平台10调整方向。到达清理区域后将气压缸8启动带动两侧挡板5向两侧展开,两侧挡板5完全展开后气压缸8停止。将前粉碎滚轮3和后粉碎滚轮12启动,将履带式辅助收集装置4、前置传送带13、后置传送带14、侧传送带7启动。船体5前侧的履带式辅助收集装置4、船体5两侧的挡板6将水面上的塑料袋、饮料瓶、烂渔网等海洋垃圾分别集中在前置传送带13和侧传送带7前。海洋垃圾通过前置传送带13和后置传送带14进入储存箱2的进料口,对其进行粉碎,即方便该机器人上岸后储存箱2的清理又节省了储存箱2的储存空间延长了该机器人单次工作时间。动力推进装置9向前推进,不断清理海洋垃圾。当该清理区域清理完成或储存箱2储存空间不足时,将履带式辅助收集装置4、前置传送带13、后置传送带14、侧传送带7停止,将前粉碎滚轮3和后粉碎滚轮12停止。将气压缸8启动带动两侧挡板5向内侧关闭,两侧挡板5完全关闭后气压缸8停止。该机器人通过无线控制系统远程操控或预先设定地址返回。顶部的太阳能电池板1为该机器人提供能源,多余的电能储存到电路箱11内的锂电池中。从而达到安全、快速、高效清理海洋垃圾的目的。
3新型双体式海洋清理平台系统设计方案:
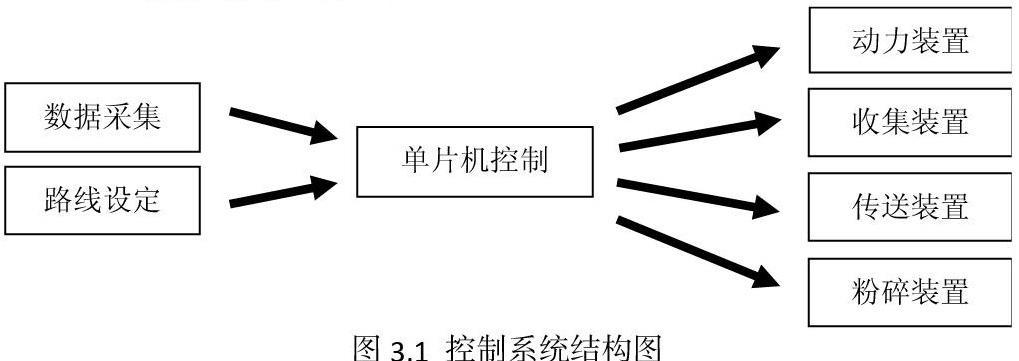
3.1控制系统整体结构图
由图3.1可知当操作人员通过摄像采集到需要清理的海域后通过控制遥控器给单片机发送信号,单片机接收到信号后控制电动机工作,通过红外光电传感器控制调节整机的位置。控制新型双体式海洋清理平台的动力装置、收集装置、传送装置、粉碎装置实现海洋清理工作。
3.2机械结构设计图
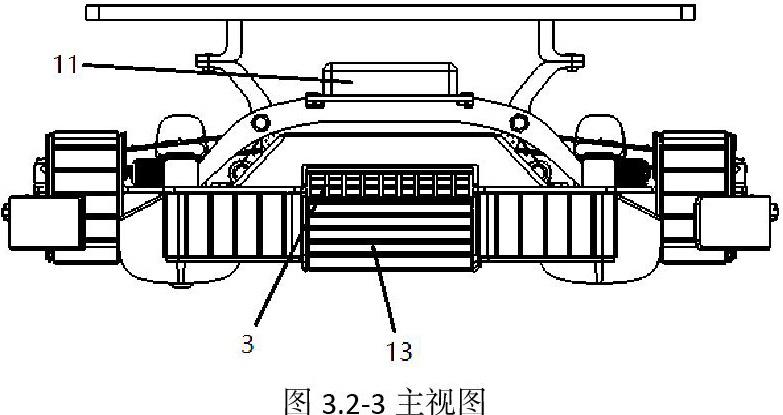
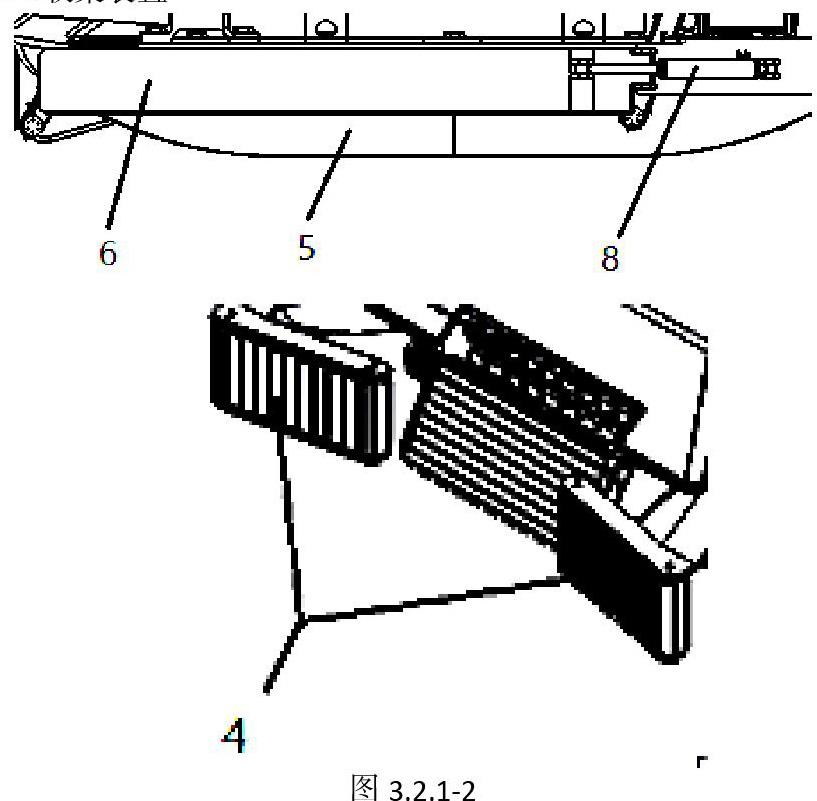
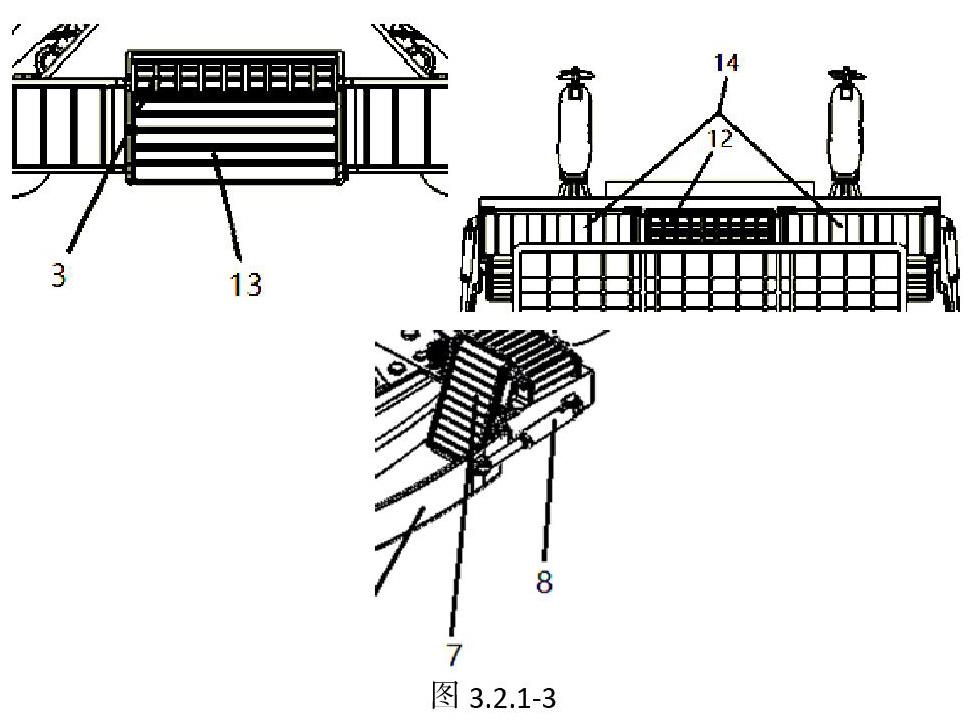
图中1太阳能电池板,2储存箱,3前粉碎滚轮,4履带式辅助收集装置,5船体,6挡板,7侧传送带,8气压缸,9动力推进装置,10转向舵机,11电路箱,12后粉碎滚轮,13前置传送带,14后置传送带,15螺旋桨。
3.2.1动力装置
如图3.2.1-1所示動力装置由动力推进装置9、转向舵机10、螺旋桨15组成,利用两个螺旋桨的正反转,转向舵机的配合控制,实现新型双体式海洋清理平台的前进后退、左移右移。
3.2.2收集装置
如图3.2.1-2所示收集装置由履带式辅助收集装置4、挡板6、气压缸8组成,当设备先前行驶时,前方的辅助收集装置4启动向内侧传动,使海洋垃圾集中到前置传送带13前;气压缸8启动两侧挡板6展开使海洋垃圾集中到侧传送带前;从而实现收集功能。
3.2.3传送装置
如图3.2.1-3所示传送装置由前置传送带13、侧传送带7、后置传送带14组成,该装置将收集装置收集的海洋垃圾传送到指定位置。
3.2.4粉碎装置
如图3.2.1-3所示粉碎装置由前粉碎滚轮3,后粉碎滚轮12组成,将传动装置传送的海洋垃圾进行粉碎存入储存箱2内,从而实现粉碎功能。
3.3新型双体式海洋清理平台的功能及优点
新型双体式海洋清理平台可应用于近海大面积清理作业,也可应用于复杂海域。采用单片机来控制设备内部的多个装置实现多种功能,如收集功能,粉碎功能等。新型双体式海洋清理平台结构强度高,实现功能可靠、抗干扰能力强,工作环境相对恶劣。
4结语:
新型双体式海洋清理平台采用单片机控制多个电机实现智能、高效、清理海洋垃圾的目的,同时采用双体式船体提高了航行稳定性。该设备即节省了人力、物力资源,又提高了清理工作效率与质量。
参考文献:
[1]水上垃圾清理机器人.陈华勇.兵工自动化2018-11 37(11)
[2]基于arm的水上垃圾清理机器人设计方法.华洵.电脑知识与技术2018-11-10
山东协和学院 济南 250000
猜你喜欢
计算机应用文摘·触控(2022年8期)2022-05-25
锦绣·中旬刊(2019年8期)2019-09-10
科学与财富(2019年21期)2019-08-06
中国机械(2014年23期)2014-10-21
科技致富向导(2013年10期)2013-06-04
现代电子技术(2009年14期)2009-09-05
电子世界(2004年4期)2004-07-26
电子世界(2004年4期)2004-07-26
电子世界(2004年4期)2004-07-26
电子世界(2004年5期)2004-07-26