双轮平衡车设计
2021-05-21 08:42:10西北民族大学电气工程学院王元琪李远航
电子世界 2021年8期
西北民族大学电气工程学院 王元琪 李远航
进入新世纪后,我国人工智能行业逐渐崭露头角,智能机器人、智能安装机器人、无人驾驶等新型科技产业飞速发展。在双轮平衡车领域,科技人员通过对陀螺仪的研究,也将其纳入发展行列。当今世界绿色主题发展越来越明显,随着科技的进步,清洁能源的大量投入使用使得电动汽车的数量在不断增加。为解决交通拥挤等问题,研究者以简洁、小型化为出发点,开发出了一款两轮电动平衡车。
1 系统框架
在设计中本装置的硬件电路主要包含:提供工作的电压并各个电路模块降压电路的设计、转向、STM32F103ZET6控制系统电路、光耦隔离电路的设计等。由于系统各部分电路所需的电压不同,因此需要特殊的电压转换电路来保证系统中各电路的正常工作。平衡数据、转向数据采集由集成处理模块MPU6050中的六轴运动和倾斜信号传感器处理,主控制系统以数据为基础进行判断,数据处理,通过高级定时器TIM1(TIM8)输出不同占空比的PWM波绕两个电机转速,使平衡车一直处于平衡状态。
2 电机驱动模块
2.1 无刷直流电机
无刷直流电动机的结构与普通直流电动机的结构非常相似。无刷直流电动机的三相绕组均匀分布在120°空间内,使用该绕组分布方法可以最大程度的节约空间,为转子提供稳定的控制回路。一般来说有三个绕组连接,一个用于Y连接,另一个用于星形连接。本文采用的连接方法是星形连接,电动机驱动电路中有六个功率晶体管分别为VT1、VT3、VT4、VT5、VT6,两个DC控制端分别为DC+、DC-。转子的实时位置数据,判断控制电路的功率晶体管的开闭情况。通过控制上臂和下臂六个功率晶体管的导通顺序,实现了电动机线圈的通电顺序的变化。该电机具有转矩和速度特性好、动态响应速度快、效率高、使用寿命长、转向过程无火花、运行平稳、维护方便等优点。
2.2 门极驱动电路设计
平衡车的控制系统中电机的控制是至关重要的。由于STM32输出的PWM信号振幅为3.3V,因此如果要驱动功率管,就需要对该信号进行放大。栅极驱动电路负责输出STM32,脉宽调制信号被放大。在门驱动电路中,6个通道的PWM波依次连接到IR2130的2-7针。驱动器放大后将脉宽调制波的幅度放大到约15V,芯片的14、15、16、19、23、27号脚的输出依次连接到6根电源管的栅极上。ITRIP引脚通过电流测量电路采集总线电流,当被测电流值大于0.5A时,触发故障引脚输出各低电平信号,此时所有输出信号将被切断以保护电路。C4、C5、C6采用漏电流小的陶瓷电容器,主要用于存储上桥臂动力管驱动的悬挂电源中的能量。d4、d5、d6为自举二极管,其具有防止上桥臂导通时直流母线电压进入IR2130电源输入端的功能,以防止器件损坏。因此,用于自举二极管的二极管应具有足够的反向电压电阻和快速恢复的优点。
2.3 三相桥式逆变电路设计
在三相桥式驱动电路中,Q1、Q2、Q3、Q4、Q5、Q6全是N型MOSFET,三相桥式驱动电路的原理是通过栅电压控制漏极电流完成对MOSFET的有效控制。MOSFET模型为P75NF75的控制电路市一种单极电压控制装置,其额定工作参数为75V、75A的配置,可以在很短的时间内完成开关状态,其耐高温性也很好。三相桥式逆变器的工作原理是通过控制六个功率晶体管的开、关状态,将直流母线电压转换成频率和幅值可控的三相对称电压信号,为电机的正常运行提供驱动信号。
3 电源模块设计
3.1 电源电量检测电路设计
本设计以12V型锂电池为动力,锂电池是一种高效节能的能源,其采用高聚合的封装方式可以留存住更多的电量,其特点是在充放电的过程中可以延长电池寿命。锂电池在生活中应用极为广泛,其具有供电耐久性强、尺寸灵活、体积小、动力充足、电压高、稳定性好等优点;其不足之处是当所使用的电机功率过大时,短时间内的放电量比较大,会造成电池内部化学试剂的老化亏损,如果不能及时为电池充电维持其正常的化学反应,极有可能对锂电池内部的试剂造成永久性损坏。因此,在本装置的设计安装中,既需要维持能够随时测量模型锂电池的功率,还需要定时对电池进行充电以维持正常的化学反应;该电池采用DS2788专业锂离子电池测量芯片能实时测量锂电池电压和放电电流的高精度性能。12V电池电压过低报警,实时功率LED显示,能够随时了解电池的实时电压变化并能执行硅简单的功率剩余持续时间估计,并随时将数据提供给主控芯片,主控芯片将信号传输给反馈机制使得STM32F103C8T6电压输入控制器芯片插脚,用于AD采样ADC采样模块,通过计算该锂电池的实时电压可获得12V,有利于12V模型软件的编制,完成对电池保护(如图1所示)。
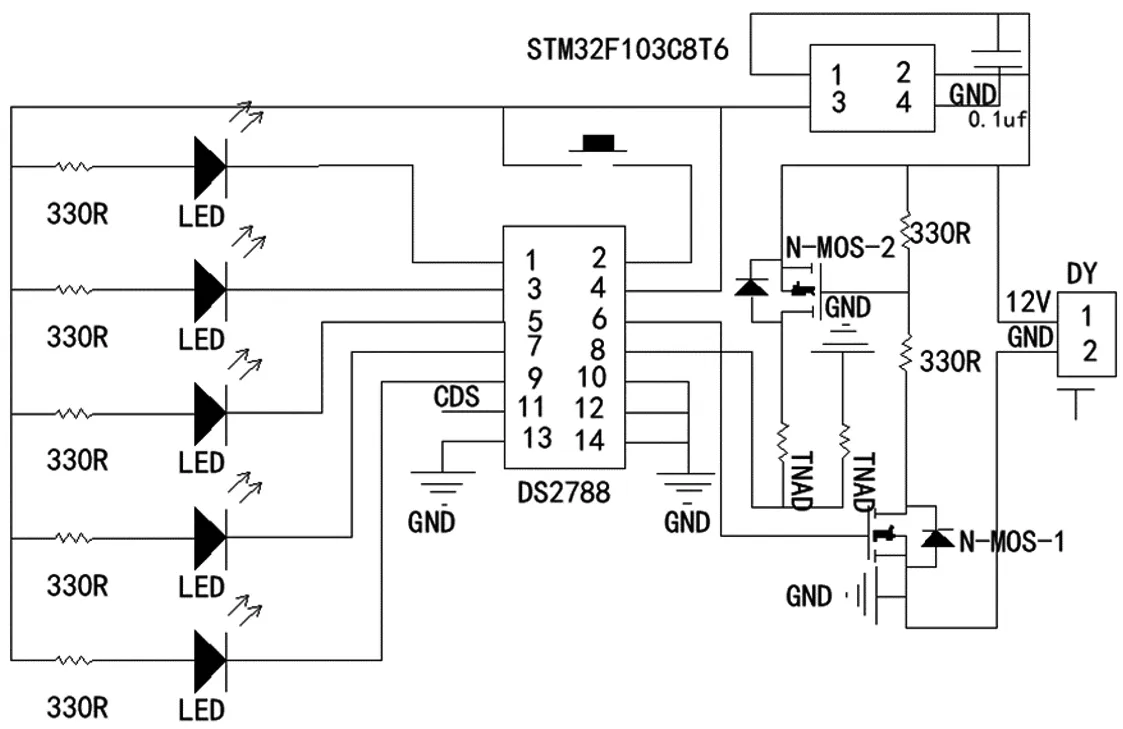
图1 电池电量检测模块原理图
3.2 电源电路设计
在本装置的设计中,由于模块的额定数据并不一致,所以不同的模块需要不同的电压水平。为保证各个模块都能正常工作,预防在实验中由于电流过大对控制模块造成不可挽回的破坏,需要将12V型锂电池提供的电压进行划分。该方法在相当多的场合都有实验验证,尤其市在高度精密的仪器中,检测时的微小电流如果处理不当都会对设备的整体控制回路造成不可挽回的破坏。
检测模块的控制电路芯片STM32F103C8T6和MPU6065都需要3.3V电压供电。在3.3V的电压下会维持控制回路的稳定,提供足够的能源,减少模块之间的能源损失。本设计采用AMS117-3.3V稳压芯片,将从稳压芯片LM2596T-5获得的5V电压重新转换为3.3V电压,AMS117-3.3V电压芯片在转换时可达到1%的精度。在该精度下,装置内部的信号也会趋于稳定,当电压为3.3V时,电压精度可满足STM32F103C8T6等敏感芯片的功率要求。AMS117-3.3V电压芯片优点是适用范围广、体积小、占用空间小等。其具备流量过热自动断电功能,此功能可以在电流过大的情况下,电阻由于电流的增大导致热量增加,可能会对控制装置中的其他模块造成损伤,所以需要使用自动断电保护装置;其具备能在恶劣环境下工作、外围电路简单、功耗低等优点。
4 显示模块
双轮平衡车显示模块主要用于实时显示双轮平衡车车身内的各种数据,包括双轮平衡车的轮速、俯仰角和转向角数据,可以为操作者提供实时的数据,方便使用者对本装置的操作系统进行预判性。其中,该显示模块的主要部件是OLED显示屏,此屏在许多设备中都有使用,具有价格低廉、无背光、响应时间短、功耗低、体积小、重量轻、对比度高等优点。
双轮平衡车需要显示的数据不多,主要有双轮平衡车的轮速、俯仰角和转向角数据,使得操作者能够在行驶的过程中随时了解自己的行驶状态,避免发生意外。显示模块的电路采用3.3V的工作电压,在6个引脚处都有接线,可以保证数据的稳定传递。
结论:两轮平衡车是一款典型的轮式机器人,其设计涉及到传感器技术、电机控制技术、电力电子等多门科学的应用。其通过将传感器收集到的信息反馈到处理器,经过运算后将命令传达到车轮,从而实行平衡车的行动。这是由多门技术整合的结果,使交通工具和人的腿一样随着人的所想而做出行动,它作为一款代步交通工具,既方便又环保,为未来的个人交通工具的研发指明了方向。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20 11:45:04
房地产导刊(2020年11期)2020-12-28 01:32:30
铁道通信信号(2019年4期)2019-10-10 03:42:56
发明与创新(2016年23期)2016-10-13 02:16:14
通信电源技术(2016年1期)2016-04-16 04:57:31
湖北工业大学学报(2016年5期)2016-02-27 13:14:51
电源技术(2016年2期)2016-02-27 09:04:52
电源技术(2015年7期)2015-08-22 08:48:22
河南科技(2014年10期)2014-02-27 14:09:18
储能科学与技术(2014年5期)2014-02-27 07:16:12