
毫米波云雷达观测和反演云降水微物理及动力参数方法研究进展
2021-05-21 06:04:44刘黎平
暴雨灾害 2021年3期
刘黎平
(中国气象科学研究院灾害天气国家重点实验室,北京100081)
引 言
云降水微物理和动力特征的探测对于理解降水的形成和发展、降水系统和周边环境的相互作用、云系对大气辐射影响、检验和验证数值模式云降水参数化方案和云降水模拟能力有非常重要的作用。地面的雨滴谱可以通过雨滴谱仪进行直接观测,空中的云降水参数可以通过飞机进行直接观测,但飞机很难获取云降水参数的连续时空分布,特别是对流系统内的上升速度、滴谱等观测更加困难。气象雷达通过主动遥感方式,可以获取到云降水的回波强度、径向速度和速度谱宽等参数的三维分布的连续变化,在一定假设情况下,得到雨滴谱参数和风场等三维分布。通常雨滴谱反演分为两类,第一类是假定雨滴谱的分布特征来反演雨滴谱参数,如指数分布反演两个参数,Gamma分布反演三个参数,这包括双线偏振雷达反演雨滴谱参数、利用双波段云雷达回波强度差反演雨滴谱参数等方法;第二类是直接反演雨滴谱分布,这种方法必须基于垂直观测的多普勒功率谱数据。云和降水虽然是紧密联系的,但因粒子大小差别很大,而后向散射能力与粒子尺度的六次方成正比(瑞利散射条件下),所以云的回波强度要远远小于降水。探测云的云雷达(采用毫米波)与探测降水的天气雷达(采用厘米波)在雷达最小可测回波强度、波长、扫描方式等方面有很大的差别。最小可测回波强度是云雷达一个非常重要的指标,云雷达通常采用短波长和脉冲压缩等技术,以提高雷达灵敏度,减小最小可测回波强度。云雷达是观测云降水的重要手段,与天气雷达相比,云雷达采用了毫米波,增加了雷达的灵敏度,提高了探测能力。同时,云雷达常常以垂直观测为主,利用多普勒功率谱数据进行云降水的反演,提高空气垂直运动速度和雨滴谱精细结构的观测能力。
云降水微物理参数主要包括云降水的滴谱分布、相态及其含水量等参数,动力参数主要包括水平风场和垂直风场、湍流等。仅仅依靠雷达观测的回波强度、径向速度、速度谱宽这几个有限的物理量很难反演得到云降水的全部气象参数,必须增加相关的假设或者增加观测量。如回波强度与粒子数密度、大小和粒子相态有关,仅仅依靠回波强度本身,很难得到雨滴谱分布和相态,必须假设雨滴谱的分布模型和增加偏振功能。三维扫描的天气雷达观测的径向速度是风场和粒子下落速度在雷达径向上的分量,要反演实际风场的三个分量,需要进行风场的各种假设(如水平均匀、水平局地均匀等),还需要利用其他物理规律,如质量连续方程,或者增加另外一个方向的径向速度探测。垂直指向的雷达观测的径向速度是空气垂直运动速度和粒子下落速度的合成量,很难把它们分开,必须利用其他参数才能获取到空气垂直运动速度。速度谱宽同时受降水粒子下落速度的变化、风的切变、湍流和雷达波束宽度的综合影响,从中单独提取任何一个量均比较困难。
为此,学者们利用双偏振技术、双波段技术,利用不同大小和不同相态粒子的形状变化和下落速度变化,或者衰减和散射随波长的变化,提取与粒子大小和粒子数密度有关的有用信息,提高微物理参数的探测能力。同时,依靠先进的计算能力和雷达信号处理方法,使得云雷达可以实时探测到多普勒功率谱数据。多普勒功率谱数据是云雷达应用非常重要的参数,也是定量反演微物理和动力参数的关键。众所周知,各种气象雷达观测的是有一定空间大小的气象目标(散射体),在这个体积内,存在有不同大小、不同相态和不同下落速度的云降水粒子,而且湍流的存在使得散射体内粒子运动速度差别变得更大,这样雷达探测到的回波功率实际上是由具有不同径向速度的功率组成的。云雷达可以利用快速傅里叶变换(FFT)方法分辨出不同径向速度的功率大小,探测到不同径向速度对应的功率的变化,即多普勒功率谱。实际上回波强度与不同径向速度的功率的积分量成正比,径向速度就是多普勒功率谱的速度加权累计平均值。对于垂直指向云雷达,径向速度(在讨论功率谱时,常常假设径向速度方向向下为正)小的功率谱对应下落速度小的粒子散射的功率,径向速度大的功率谱对应下落速度大的粒子散射的功率,而粒子下落速度的大小与粒子大小有关,后向散射截面与粒子大小也有关系。这样,就可以利用功率谱反演得到雨滴谱分布和空气垂直运动速度。另外,云雷达观测的回波强度等还受到衰减的影响,而准确计算衰减系数又需要确定滴谱分布、温度等,这又给参数反演增加了困难。利用云雷达反演云降水微物理和动力参数的主要问题就是如何从有限的观测参数中,通过一定的合理假设,单独提取出气象参数。为此,学者们发展了很多云降水微物理和动力参数反演方法。
国内外有关云雷达观测和研究方面的内容非常广泛,我国除开展了多种雷达观测技术研究、质量控制方法研究、云降水微物理和动力参数反演方法研究外,还开展了云的宏观参数观测研究、不同云系的结构分析、云雷达与探空、微波辐射计等联合分析研究。鉴于篇幅所限和作者的研究工作,本文仅介绍云雷达观测模式、数据质量控制和融合方法、多种云雷达反演空气垂直运动速度和雨滴谱分布反演方法等进展。
1 云雷达观测方法和数据质量控制方法
目前应用的云雷达包括W(3 mm波长)、Ka(8 mm波长)和Ku(2 cm波长)波段云雷达,为了增加云降水微物理和动力参数探测能力,又发展了双波段云雷达技术。表1给出了国内外具有代表性的毫米波云雷达。图1给出了美国MMCR Ka波段云雷达和中国气象科学研究院的Ka/Ku双波段云雷达。这些雷达的发射机多种多样,有大功率的磁控管和行波管发射机,也有小功率但稳定性更好寿命更长的固态发射机。因观测目的不同,这些云雷达采用了不同波长、不同发射功率和不同观测策略。
1.1 云雷达观测模式设计和数据融合方法
毫米波云雷达目前主要有两种波段:Ka波段(雷达波长8 mm)和W波段(雷达波长3 mm),发射机通常采用磁控管、速调管和固态发射机。云雷达通常用于云垂直结构的定点长时间连续观测,它不仅能够有效观测各种云,同时对弱降水也有一定的探测能力。采用垂直指向观测的云雷达为了观测不同高度、不同强度的云和弱降水的垂直分布,既需要非常高的灵敏度、大的动态范围,同时需要很小的观测盲区。而云雷达为了达到连续长期观测的目的,常常采用发射功率比较小,但稳定和长寿命的固态发射机,这样采用常规的脉冲宽度就很难满足高灵敏度的要求,为此,云雷达通常采用相干积累和脉冲压缩的方式,以提高雷达的灵敏度。但相干积累在增加灵敏度的同时,也减小了最大不模糊径向速度,同时会对降雨回波产生低估(降水粒子下落速度比较大,信号相干时间变短);脉冲压缩能有效增加雷达灵敏度,但会产生距离旁瓣,并增大了盲区。这样,为了兼顾高灵敏度、大动态范围和小盲区,云雷达常常采用多种观测模式进行循环观测。如美国能源部发起的大气辐射观测计划(the Atmospheric Radiation Measurement(ARM)Program)的行波管发射机的Ka波段云雷达(MMCR)在1996年前采用了4种观测模式的循环观测方式,其中2种模式是脉冲压缩的高灵敏度的高云观测模式,另外2种没有脉冲压缩的探测低层云和降水模式,不同观测模式的距离分辨率(45 m、90 m)和探测的最大高度也不同(10 km、15 km),在5 km高度上最小可测回波强度达到-49 dBz(Moran et al.,1998)。1997年后的MMCR观测模式又增加了脉冲重复频率、相干和非相干积累数,将最小可测回波强度减小到-54 dBz(Clothiaux et al.,1999)。图2给出了不同观测模式的回波强度和融合后的回波强度的高度-时间图。

表1 国内外具有代表性的毫米波云雷达简介Table 1 Introduction to main cloud radar systems at home and abroad.
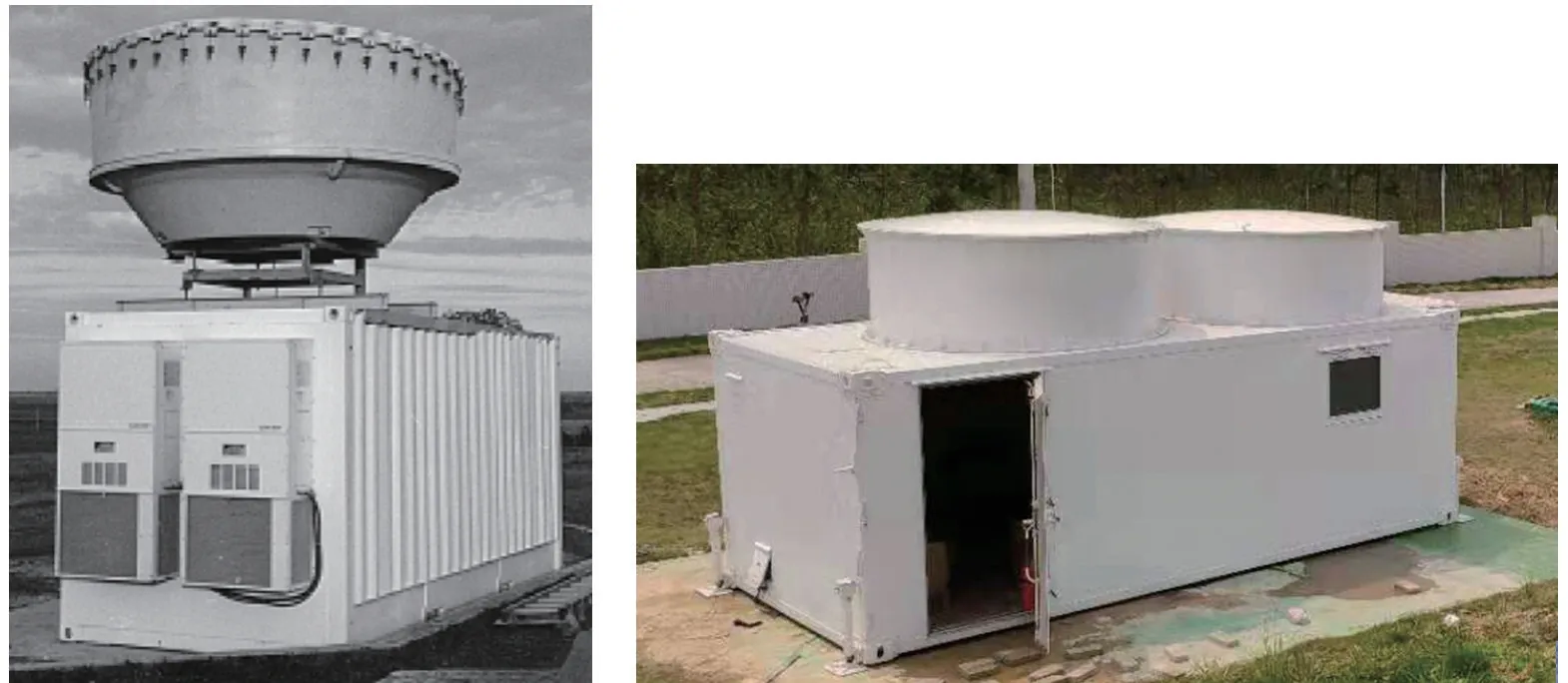
图1 美国MMCR Ka波段云雷达(a)和中国气象科学研究院的Ka/Ku双波段云雷达(b)Fig.1(a)MMCR Ka band radar in USA and(b)Ka/Ku band cloud radar in Chinese Academy of Meteorological Sciences,China.
Kollias等(2007)又进一步完善了观测模式,把观测模式增加到了5种,包括边界层模式、卷云模式、降水模式、普通模式和极化模式。多种观测模式的设计有效提高了整个雷达系统的探测能力,然而对于具体一个模式而言,其最小可测回波强度、探测高度范围、回波强度和多普勒速度范围、径向速度分辨率等雷达核心指标的设计是一个折衷的问题,如脉冲压缩处理虽然提高了灵敏度和探测威力但也会使得雷达近距离的盲区变大,相干积累提高了灵敏度但同时也降低了多普勒速度的最大不模糊速度范围等等。
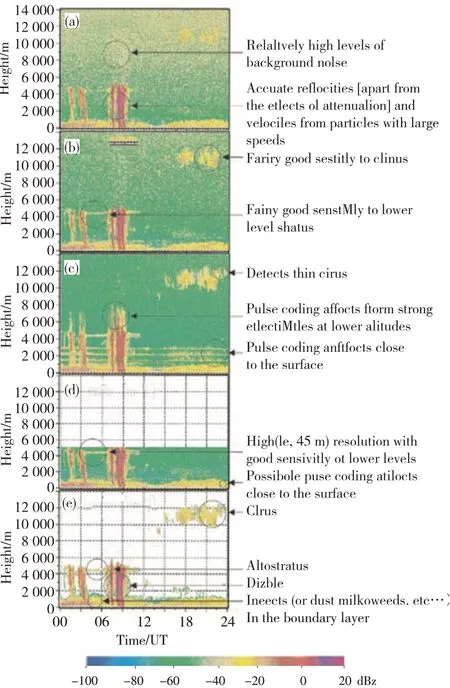
图2 云雷达4个观测模式观测的回波强度(a—d)和融合的回波强度(e)的高度-时间图(引自Clothiaux等,1999)Fig.2 The height-time cross section of raw and merged reflectivity data from MMCR’s four work models(Adopted from Clothiaux et al.,1999).
1985年,我国就探索了毫米波技术探测云结构设想,并进行了初步的研究(魏重等,1985)。20世纪后,我国早期研制的毫米波雷达研制多采用磁控管和行波管大功率器件作为发射机,如中国气象科学研究院与航天科工集团第23所研制的行波管作为发射机Ka波段云雷达,峰值功率为600 W,采用的脉冲宽度为0.3μs、1.5μs,在10 km距离上的最小可测回波强度分别为-25.7 dBz和-31.3 dBz。因发射机寿命问题,该雷达只能进行定时观测(Zhong et al.,2012;刘黎平等,2014)。为了实现云降水的连续稳定观测,2013年中国气象科学研究院与航天科工集体第23所联合研制了固态发射机体制的Ka波段毫米波云雷达,并应用于2014年、2015年第三次青藏高原大气科学试验和2016—2020年华南暴雨云参数中。该雷达采用了脉冲压缩、相干和非相干积累等技术,采用了三种观测模式的交替循环观测,分别探测降水、边界层云和高层卷云(Liu et al.,2015)。2019年,该云雷达被改造为Ka/Ku双波段云雷达,同时又增加了一种适合于中云探测的模式。安徽四创电子股份有限公司研发的固态发射机体制的Ka波段云雷达也采用了4种观测模式(Liu et al.,2019)。利用多模式的云雷达观测的回波强度、径向速度、速度谱宽和退偏振因子,可以定性分析云降水微物理参数的垂直变化特征,讨论空气垂直运动速度的变化(陈羿辰等,2018)。目前,最先进的云雷达通常采用偏振体制,并具有实时探测和采集多普勒功率谱的功能。我国用于各省人工影响天气观测的云雷达也采用了固态发射机的多模式观测方式,但为了节省经费,通常采用单偏振技术,多普勒功率谱也不一定实时采集。
目前,我国也开展了W波段云雷达研制、W、Ka和Ku等双波段或多波段云雷达研究,也进行了机载云雷达的技术探索。我国有气象专业的高校、中科院、气象局等均有多种云雷达在大气科学试验中应用,除此以外,在人工影响天气业务、大城市观测等业务中也使用了云雷达。
1.2 多模式云雷达基数据融合方法
云雷达因采用了多种观测模式的轮流观测,依次获取到不同雷达灵敏度、不同最大径向速度和不同盲区的雷达基数据。这些数据有些存在径向速度模糊问题;有些数据受距离旁瓣影响,有效数据发生了过饱和现象;有些数据因信噪比(SNR)比较小,数据的可靠性不高。为此需要对不同模式观测数据进行评估,根据不同情况选取最优的不同观测模式数据,以兼顾空间探测范围和强弱回波的探测范围,形成有机融合的基数据。数据融合需要考虑如下关键问题:(1)数据的可靠性,当信噪比SNR超过一定阈值后(如3 dB),云雷达观测的回波强度、径向速度和速度谱宽质量才比较高,相反SNR非常小时,雷达数据的估测偏差比较大;(2)过饱和问题,因为云雷达的动态范围是有限的,如在某一高度上,云雷达观测的最小可测回波强度为-40 dBz,在动态范围为70 dB时,云雷达在这一高度上能够观测的最大回波强度为30 dBz,如果实际回波强度超过30 dBz,云雷达实际观测的回波强度就会出现偏差,特别是退偏振因子LDR估计值会偏大;(3)径向速度的模糊问题,当大的粒子存在时或者有比较强的上升气流或者下沉气流时,因采用了相干累积的观测模式的最大不模糊径向速度就会成倍减小,径向速度就会出现径向速度模糊,速度谱宽也会出现误差;(4)径向速度的分辨率,采用相干积累后虽然最大不模糊径向速度变小,但径向速度分辨率提高了,在其它条件相同情况下,尽量采用分辨率高的数据;(5)因采用脉冲压缩出现的距离旁瓣等问题;(6)不同模式估测数据存在一定偏差,特别是对于下落速度比较大的液态降水回波。根据这些情况,数据融合的原则是:(1)在出现径向速度模糊时,尽量采用最大不模糊径向速度值的模式数据;(2)当回波强度出现饱和时,尽量采用低灵敏度的模式数据;(3)在其他情况相同的情况下,最好采用高径向速度分辨率的数据;(4)当其他模式数据的SNR足够大时,尽量避免采用使用了脉压压缩和相干积累模式的数据;(5)回波强度、径向速度和速度谱宽采用同一模式的结果;(6)LDR数据采用单独融合方法(Clothiaux et al.,2000;Liu et al.,2017)。
与天气雷达低仰角的扫描数据不同的是,云雷达径向速度模糊常常是部分模糊,即垂直观测的云雷达因不同降水粒子下降速度的差别,常常径向速度差别比较大,多普勒功率谱的宽度比较大,在发生模糊时,多普勒功率谱中径向速度大的功率谱发生了模糊,而径向速度比较小的并未发生模糊。这时,雷达探测的径向速度很难用常规退径向速度模糊方法进行订正,只能从多普勒功率谱数据的退模糊出发,利用退速度模糊的多普勒功率谱再计算径向速度和速度谱宽。而低仰角观测时,天气雷达散射体内不同降水粒子对应的径向速度的差别不大,如果发生速度模糊,也是整体模糊,这样利用整体平移的方式就能够消除径向速度模糊。
1.3 多普勒功率谱的质量控制和融合
对于垂直观测的云雷达来说,多普勒功率谱是非常重要的数据,是退径向速度模糊、进行衰减订正,从而形成高质量的再分析基数据,反演空气垂直运动速度、雨滴谱必需的。虽然存储该数据需要非常大的空间,如一个时刻一个距离库的多普勒功率谱就有256个功率谱谱点数据,以描述不同速度对应的功率谱的分布(采用256处理点数),但一个空间点只有一个回波强度数据、一个径向速度和一个速度谱宽。多普勒功率谱的质量控制和融合主要包括:非气象回波(生物回波、浮尘等)识别,多普勒功率谱的退速度模糊、二次回波识别和消除,多普勒功率谱的融合和回波强度、径向速度、速度谱宽等重新计算等。Kollias等(2007)利用FFT方法实现了多普勒功率谱的实时采集,并提出了多普勒功率谱的质量控制方法,包括:生物回波与云回波的识别,多普勒功率谱的退模糊、距离旁瓣识别等,并优化了回波强度、径向速度和速度谱宽的后处理方法。云雷达处理径向速度退模糊与天气雷达完全不同,它是利用多普勒功率谱数据,而天气雷达速度模糊处理是基于径向速度本身数据的。云雷达速度模糊处理首先判断多普勒功率谱是不是存在模糊问题和哪些功率谱是模糊的,对模糊的功率谱进行退模糊处理,形成退模糊后的功率谱数据,然后再计算径向速度和速度谱宽。Tridon等(2011)也采用类似的方法设计一套自动检测微降水雷达回波强度谱密度数据中的速度模糊问题的方法。云雷达的衰减订正往往采用雨滴谱直接计算衰减系数的方法,首先反演下层的雨滴谱,计算衰减系数,进行远端回波强度和回波强度谱密度衰减订正,然后再逐库往上一一计算雨滴谱和进行衰减订正(Peters et al.,2010;Tridon and Battaglia,2015)。Liu等(2019)比较了安徽四创电子股份有限公司研发的固态发射机体制的Ka波段云雷达4个观测模式的回波强度、径向速度、速度谱宽、退偏振因子和功率谱参数的一致性,评估了相干积累和脉冲压缩对回波强度谱密度和回波强度等影响,提出了多模式观测的多普勒功率谱的质量控制方法,融合方法和回波强度谱密度的回波强度、径向速度、速度谱宽的再计算方法,通过与原始数据的比较,初步分析了质量控制效果和数据融合效果,结果表明相干积累明显影响液体降水估测效果,但对固态降水影响不大,在弱降水观测的云雷达中谨慎使用。长脉冲观测模式距离旁瓣对零度层亮带上方功率谱有明显影响,同时影响径向速度观测结果。功率谱质量控制方法很好地解决了功率谱的速度模糊和距离旁瓣影响,重新计算的径向速度和速度谱宽更加合理,而这种距离旁瓣仅仅利用回波强度和径向速度很难判。融合后的基数据集成了多种观测模式的优势,满足了云和弱降水的同时观测的需求。融合后的回波强度谱密度数据和再计算得到的回波强度、径向速度和速度谱宽将用于云降水微物理和动力参数分析中。图3给出了该雷达降水模式和卷云模式观测的回波强度和径向速度的比较以及质量控制的效果。
2 云内空气垂直运动速度反演方法
2.1 回波强度与粒子下落速度关系方法
垂直指向云雷达观测的径向速度是空气垂直运动速度和粒子下落速度的合成,如果知道了粒子下落速度,就可以利用径向速度反演得到空气垂直运动速度。因为雨滴的下落速度与粒子大小和海拔高度的关系通过实验室测量可以确定(Atlas,1973;Frisch et al.,1995),在一定滴谱假设情况下,就可以计算回波强度Z和粒子群的下落速度Vt的关系,即在忽略空气垂直运动速度条件下雷达观测的径向速度。利用雷达观测的回波强度和Z-Vt关系,可以估测出降水粒子的下落速度,这样就可以得到空气垂直运动速度(Hauser and Amayene,1981)。阮悦等(2018)也利用C波段垂直观测连续波雷达在青藏高原那曲地区观测的对流云回波强度与粒子下落速度的关系,从径向速度中分离出流云内空气上升速度。这一方法主要问题是,雨滴谱的变化能够引起Z-Vt关系的显著变化,即雨滴谱不同,一个回波强度可以对应不同的Vt,从而引起Vt计算误差,进一步导致空气垂直运动速度的误差。另外,回波强度的系统偏差和因衰减引起的回波强度偏差也会引起Vt计算结果的变化,也能造成空气垂直运动速度的误差,而衰减误差的订正公式与雨滴谱的选择有关(王振会等,2011)。

图3 2018年5月21日09∶26—11∶12(北京时,下同)云雷达观测的和重新计算的回波强度、径向速度和速度谱宽的高度-时间图(a)和(b)为降水模式观测的回波强度和径向速度,(c)和(d)为卷云模式观测结果,(e)和(f)为退速度模糊后再计算的径向速度和速度谱宽,(g)和(h)为退模糊和消除距离旁瓣后的计算结果(引自Liu等,2019)Fig.3 Height-time cross sections of raw reflectivity and radial velocity measurements obtained using(a,b)precipitation Mode and(c,d)cirrus mode,(e,f)recalculated radial velocity and spectrum width after dealiasing only and(g,h)after dealiasing and artifact removal from cirrus mode from 09∶26 BT to 11∶12 BT on 21 May 2018(Adopted from Liu et al.,2019).
2.2 小粒子跟踪方法
因多普勒功率谱中含有小粒子对应的径向速度和相应的功率谱,单波段多普勒功率谱数据是反演空气上升速度和雨滴谱的重要数据来源,学者通常采用小粒子示踪方法,来反演空气垂直运动速度。小粒子示踪法是利用云雷达多普勒功率谱反演雨滴谱和上升速度的一个重要的方法。由于毫米波的雷达灵敏度很高,对小粒子的探测能力更强,可以探测到很小的云粒子对应的径向速度,它自身的下落末速度与相对大气的垂直速度是可以忽略的,可以作为示踪物来反演大气的垂直速度。如Gossard等(1997)年利用Ka波段云雷达观测的多普勒功率谱,分析得到云粒子对应的功率谱位置,从而反演空气垂直运动速度。Shupe等(2008)假设云中存在小的粒子,在考虑了湍流、空气水平风速等对空气垂直运动速度影响情况下,利用小粒子跟踪方法反演空气垂直运动速度。刘黎平等(2014)也利用小粒子示踪法反演了云南腾冲层状云内的大气垂直运动速度,并对湍流影响进行了敏感性讨论。彭亮等(2012)先利用小粒子示踪法计算了云内空气垂直速度,然后选取结果中受湍流影响较小的数据结合回波强度以及Doppler平均速度建立Z-Vt关系,根据此关系再次反演垂直速度,并对比分析两种反演的结果。Zheng等(2017)详细讨论了多普勒功率谱的数据处理方法,对青藏高原及云内的大气垂直速度进行了反演。图4为青藏高原一次对流过程的空气垂直运动速度的结果。基于多普勒功率谱的小粒子示踪方法主要问题是,如何确定小粒子对应的多普勒功率谱谱点的位置,湍流对功率谱拓宽的影响,雷达灵敏度对小粒子对应谱点位置的影响等。
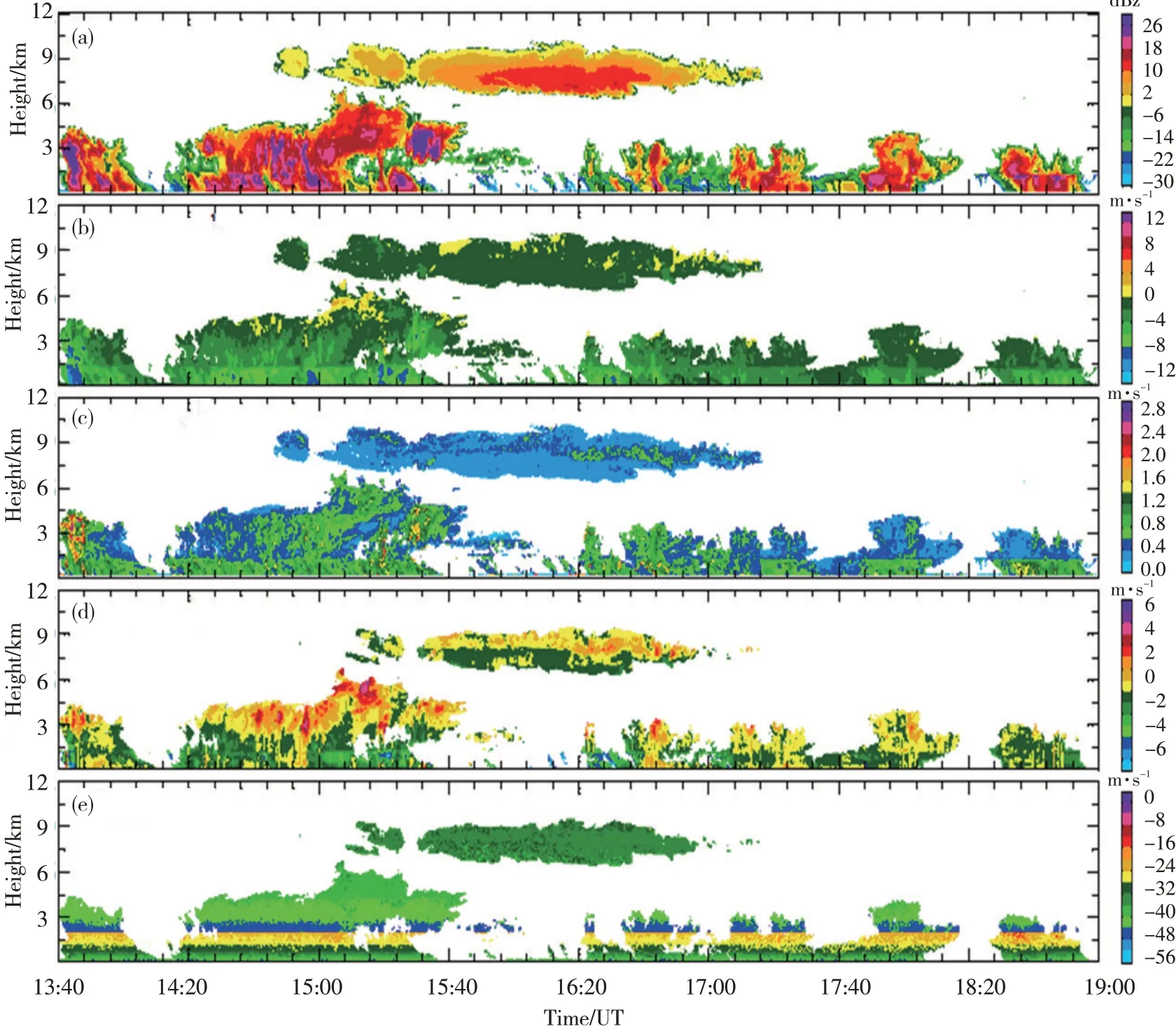
图4 2015年8月18日13:40—19:00云雷达观测的青藏高原一次对流过程的回波强度Z(a,单位:dBz)、径向速度MV(b,单位:m·s-1)、速度谱宽σV(c,单位:m·s-1)、反演的空气垂直速度ɷ(d,单位:m·s-1)和左侧第一个有效谱点回波强度谱密度的大小Ztraced(e,单位:dBz)(引自Zheng等,2017)Fig.4 Cloud radar measurements and retrieval results of a light convective precipitation process collected from 13:40 BT to 19:00 BT on 18 August 2015.(a)the reflectivity(unit:dBz),(b)the mean Doppler velocity(unit:m·s-1),(c)the spectrum width(unit:m·s-1),(d)the vertical air velocity(unit:m·s-1)and(e)the reflectivity of tracedspectral bin(unit:dBz)(Adopted from Zheng et al.,2017).
对于风廓线雷达,可利用风廓线雷达垂直波束探测降水云时返回信号功率谱中同时出现的大气垂直运动谱和降水粒子谱的双峰谱现象,进行双峰谱识别来探测空气垂直运动速度,并拟合得到Z-Vt关系,为降水时垂直指向的多普勒雷达获取降水中大气垂直平均运动速度提供有效的方法(马建立等,2015;王晓蕾等,2010)。
2.3 W波段云雷达Mie散射效应方法
为了克服湍流等因素对多普勒功率谱拓宽的影响,Lhermitte(1988)提出了利用W波段独特的散射特性来反演空气垂直运动速度,Kollias等(2002,2003)利用W波段云雷达米散射的震荡特性研究空气上升速度。当利用W波段毫米波雷达探测层状云中的雨滴时,比较大的粒子会发生Mie散射,Mie散射引起的后向散射截面的谐振特性反映在多普勒功率谱的分布中,就会出多普勒功率谱的有规律的震荡,而这种震荡的波峰和波谷对应的雨滴大小是固定的,在一定高度上,波峰和波谷对应的径向速度也是固定的,云雷达实际探测的这些波峰波谷的径向速度与其理论值差就是空气垂直云底速度。这种方法主要应用在有比较大的粒子存在的云内空气垂直运动速度的反演上。
2.4 双波段云雷达功率谱方法
双波段云雷达多普勒功率谱的应用主要集中在W波段、Ka波段和Ku波段,如W和Ka波段、Ka和Ku波段组成的双波段云雷达。这种方法的原理是:因Mie散射效应,使得两个波段功率谱的比值在固定的粒子直径上出现极大值或者极小值,这些极值点在一定高度上对应一定的粒子下落速度(理论值)。在空气垂直运动为零时,云雷达探测到的这些极值点的径向速度应对应这些理论值。如果存在空气垂直运动时,雷达观测值和理论值就存在差异,这个差异就是空气垂直运动速度。Firda等(2009)提出了一种基于W和Ka波段云雷达多普勒功率谱密度数据比值的空气垂直运动速度反演方法,并利用迭代方法进一步反演雨滴谱分布。Tridon和Battaglia(2015)提出了一种正演方法,利用W和Ka波段多普勒功率谱数据反演空气上升速度和雨滴谱分布。基于W和Ka波段云雷达探测非降水云的能力比较强,而且Mie散射的特征比较明显,能够比较准确确定空气垂直运动速度,主要问题是降水云对W波段雷达衰减比较厉害,探测高度和探测降水云的能力有限。
我国也开展了Ka/Ku双波段云雷达和多波段云雷达的设备研制和观测试验。郑晨雨和刘黎平(2020)通过数值模拟方法,证明了温度、湍流等对Ka、Ku两个波段功率谱比值极大值(Ka/Ku)位置的影响非常小,并利用在华南观测数据,使用这种方法分析了空气垂直运动速度,且与单波段小粒子跟踪方法反演的空气垂直运动速度进行了比较,表明Ka/Ku双波段云雷达获取的功率谱可以进行空气垂直运动速度的反演,得到的结果更加合理,减小了因雷达灵敏度变化产生的反演偏差。这种方法只能应用于液态降水空气垂直运动速度的反演,而且必须有足够大的粒子存在。
3 云降水微物理参数反演方法
3.1 基于回波强度的含水量反演方法
在一定的滴谱假设情况下,液态含水量LWC和固态含水量IWC与回波强度往往存在一定的统计关系,在只有回波强度情况下,可以利用这种关系反演含水量。Atlas(1954)首先提出单独用回波强度对LWC进行反演,采用的Z-LWC经验关系可表达为

利用雷达对非降水层云进行观测,结合飞机观测数据,弱强度非降水层云的系数a=0.048,b=2.0。但这种关系对云内滴谱的变化非常敏感,不同云系对应不同的关系,云和弱降水的关系差别就更大了。如Sau⁃vageot和Omar(1987)利用云雷达和机载微波辐射计,联合其他设备进行层积云的观测实验,进行大量数据的统计拟合得出a=14.54,b=0.76,并首次提出将回波强度-15 dBz作为降水粒子与非降水粒子的界限;Fox等(1997)用地基雷达联合飞机观测,利用北大西洋层积云数据得到a=45.277,b=0.86;Miles等(2000)将层云分为海洋性层云和大陆性层云并分别做了研究,并得到海洋层云的a=2.4,b=0.5,大陆性层云的a=4.6,b=0.5;Baedi等(2000)在CLARE98(激光雷达与天气雷达联合观测实验)实验中,利用地基雷达和激光雷达,联合飞机观测数据,得出了云中存在少量毛毛雨情况下的a=0.457,b=0.19;Krasnov和Russchenberg(2002)在第三次对流降雨云外场实验中,结合CLARE98等实验的结果,得到了云中存在明显降雨粒子情况下a=0.258,b=0.633。
同样,对于冰云也存在类型的关系。Liu和Illing⁃worth(2000)结合多次外场试验数据得到了冰云IWC观测公式系数:a=0.092,b=0.59;Protat等(2007)得到的适应于全球冰云、中高纬冰云和热带冰云的IWC估测系数分别为:a=0.09,b=0.58;a=0.082,b=0.54;a=0.103,b=0.6,而Zhao等(2016)使用a=0.097,b=0.59来反演青藏高原夏季云的冰水含量。
从以上研究结果可以看到,不同地区、不同类型的云和降水的反演公式差别非常大,特别是云和存在大粒子的降水的反演结果可能差几十倍,甚至百倍。其主要原因是:含水量与粒子大小的三次方成正比,而回波强度在瑞利散射条件下与粒子尺度的六次方成正比,如果存在大的降水粒子,回波强度会增加非常大,而降水粒子对含水量的贡献相对来说比较小。采用不恰当的公式,会得到误差很大的含水量计算结果,这样看来,仅仅依靠回波强度本身来反演含水量存在一定的问题。这样,学者们就想到了利用微波辐射计与云雷达联合反演LWC的方法。
3.2 微波辐射计和云雷达联合反演含水量方法
微波辐射计能够比较准确探测液态水总含量,而云雷达能否探测到云的垂直变化,能否把微波辐射计与云雷达结合起来进行液态水含量反演,以减小Z-LWC关系对反演结果的影响呢?Frisch等(1995)在大西洋层积云演变试验(ASTEX)中提出了综合利用毫米波雷达和微波辐射计反演暖云LWC垂直廓线的方法。在假设云滴谱满足对数正态分布和GAMMA分布基础上,利用统计方法得到了Z与LWC之间的关系,然后假设云滴数浓度在垂直高度上是一个常量,利用微波辐射计得到的云液态水路径LWP作为约束条件,在确定Z-LWC关系系数b的情况下,得到新的系数a值,从而反演各个雷达距离库上的LWC值,得到更准确的LWC垂直廓线(Frisch et al.,19951;1998)。Frisch等(2000)把用此方法反演出的LWC廓线和飞机数据作对比,结果十分理想。谢晓林和刘黎平(2016)把这种方法推广到冷云的液态水含量廓线反演上,在假设液体云和冰云对应的回波强度比例随温度线性变化基础上,得到零度层以上的液体云对应的回波强度,从而利用微波辐射计探测的LWP和云雷达探测的液态云对应的回波强度廓线,确定系数a,最后计算LWC廓线。另外,在云滴谱假设等条件下,利用微波辐射计获得的云液水路径和毫米波云雷达获得的回波强度与云滴含水量、云滴有效半径之间的关系,计算出含水量和云滴有效半径,由含水量与云滴数浓度的关系计算出云粒子数浓度(韦凯华等,2015)。
3.3 双波段云雷达含水量廓线和滴谱反演方法
首先讨论双波段云雷达回波强度差(DWR)方法。降水粒子的衰减截面与粒子质量基本成正比关系,这样就可以得到衰减系数K与含水量LWC也是基本成正比,在这种情况下,这种K-LWC关系受滴谱变化的影响就非常小,只与波长、温度和粒子相态有关。这样,探测到衰减系数就可以比较好地反演含水量。但利用单波段云雷达技术很难探测得到衰减系数,因为云雷达探测的回波强度垂直变化受回波强度本身的变化和衰减共同影响,很难把两者分开。为此,学者试图使用双波段雷达方式解决这一问题。
在忽略Mie散射影响的情况下,双波段云雷达探测到的两个波段回波强度的差(DWR)主要与云和降水对两个波段的衰减大小有关,与不同高度上回波强度本身的变化没有关系;而DWR随距离变化的梯度就与两个波段衰减系数的差成正比,也与含水量成正比,这样就可以利用DWR随距离变化的梯度探测含水量了。国外学者提出了多种波长配对的方案,包括X/S、X/Ka、Ka/Ku、S/Ka等(X波段波长为3 cm,S波段波长为10 cm),利用DWR随距离变化的梯度可以反演得到微观物理参数,主要包括:水云的液水含量和中值半径、混合云的液水含量和冰水含量、雨滴谱及其廓线(强降雨除外),雪花的中值半径、数浓度、降雪率等。液水含量的反演主要采用差分衰减的方法,雨滴谱参数的反演主要采用后向反演算法,雪花微物理参数及降雪率的反演主要采用模拟的方法。这些方法的反演结果也存在一定的偏差,在一定程度上要受到回波强度测量噪声、双频雷达波束的不匹配、瑞利散射假设、温度误差等的影响。如NOAA的ETL(Environmental Tech⁃nology Laboratory)发展的地基双波段雷达工作波长为X和Ka波段,应用于1991年在美国科罗拉多东北部进行的WISP(Winter Icing and Storms Project)试验项目,采用差分衰减的方法反演了水云的液水含量和云滴中值半径,降雪的中值直径和降雪强度(Matrosov,1998)。Ka波段雷达的衰减被用作反演液水含量,联合Ka波段雷达的衰减和X波段雷达反射率来反演冰水含量(Vive⁃Kanandan et al.,1999;2001)。Hogan等(2005)设计了一套完整的用Ka和W波长对反演层积云的液态水含量的方案,反演精度可达到0.04 g·m-3,相较于之前3.2 cm(X)和0.86 cm(Ka)波长组合的0.34 g·m-3的反演精度有了很大提高。2004年在美国加勒比海的RICO(Rain In Cumulus over the Ocean)试验中,有学者采用NCAR(National Center for Atmospheric Research)发展的S/Ka频段地基双频雷达观测数据,反演了液水含量、粒子中值半径及其垂直廓线(Ellis and Vivekanan⁃dan,2011)。Szyrmer和Zawadzki(2014a,2014b)利用2011年在加拿大魁北克的蒙特利尔McGill雷达观测站地基X/W频段双频垂直指向雷达的观测数据,反演了雪的微物理参数。刘胜男(2020)利用中国气象科学研究院的Ka/ku双波段云雷达数据,分析两个波段回波强度的一致性,研究了DWR反演LWP的结果与微波辐射计观测结果的差异,讨论了温度和滴谱变化等对反演的雨滴谱参数的影响。Wang等(2020)讨论了利用地基双波段云雷达反演降水量廓线的两种迭代方法的效果。
随着卫星技术进步,星载双频雷达技术也走向成熟。2014年GPM卫星发射携载双波段测雨雷达(DPR)发射升空,针对全球降水观测卫星(GPM)核心观测平台的主要仪器设备星载双频雷达(DPR),由于探测距离的影响,虽然采用了短波长但距离比较远,该雷达的最小可测回波强度还是比较高(13~17 dBz),探测云的能力非常有限,主要用于降水廓线的探测。Hogan和Illingworth(1999)提出了双波段云雷达技术反演降水微物理参数的设想;AdhiKari等(2007)发展了基于GPM双频降水雷达的差分衰减(DA)修订方法来反演降水粒子的滴谱分布;Liao和Meneghini(2005)提出一套利用机载和星载双波长雷达反演降水廓线的方案,并讨论了雨滴谱变化引起的反演量的不确定性提出了优化的雨强廓线反演方法(Liao et al.,2014;Liao and Meneghini,2019)。Meneghini等(2015)、Gorgucci和Baldi⁃ni(2016)均对GPM核心观测平台上搭载的双波段降水雷达资料及反演的雨滴谱参数进行了初步评估,定量对比分析表明:用雷达料反演的雨滴谱参数与自适应数值方法模拟的结果一致性较好。吴琼等(2018)使用星载雷达模拟器输出的模拟数据,为星载波段云雷达选择了最佳的频点组合,并开展了双波段云雷达联合反演云微物理参数的算法研究。
3.4 单波段云雷达多普勒功率谱的雨滴谱反演方法
考虑到空气垂直运动速度、雨滴谱和湍流均会造成雷达观测的多普勒功率谱的变化,如空气垂直运动速度使多普勒功率谱发生平移,湍流会拓宽多普勒功率谱。利用单波段云雷达多普勒功率谱反演雨滴谱分布和含水量等微物理特征,首先要利用小粒子跟踪方法或者其他方法等确定空气垂直运动速度,通过平移方法消除空气运动对多普勒功率谱的影响,然后在忽略湍流影响或者假定湍流强度情况下,利用反卷积等方法消除湍流对功率谱的影响,得到雨滴谱本身产生的多普勒功率谱,最后利用后向散射截面、雨滴下落速度与直径的关系,从功率谱中直接计算得到雨滴谱分布。利用雨滴谱分布可直接计算衰减系数,对上部的多普勒功率谱进行订正。如Giangrande等(2010)利用W波段多普勒功率谱非瑞利散射特征方法得到空气垂直运动速度,然后反演雨滴谱分布。以小粒子作为示踪物来反演大气的垂直速度,然后根据多普勒功率谱与雨滴谱的关系,直接计算雨滴谱分布(Gos⁃sard,1994;Kollias et al.,2003;Shupe et al.,2008)。刘黎平等(2014)也利用小粒子示踪法反演了云南腾冲层状云内的大气垂直运动速度,并对反演结果受湍流的影响进行了敏感性讨论。
3.5 双波段云雷达多普勒功率谱方法
双波段功率谱方法反演雨滴谱分布、空气垂直运动速度和湍流,通常是在考虑衰减影响的情况下,利用雨滴谱、空气垂直运动速度和湍流强度与双波段云雷达观测的多普勒功率谱的关系,直接计算得到正演的双波段云雷达的多普勒功率谱,然后建立价值函数来描述反演的多普勒功率谱与雷达实际观测的功率谱的差别,最后利用三维变化方法计算价值函数的极小值来最后确定反演量,或者是通过循环的方式确定反演量。其中,衰减系数可根据雨滴谱分布直接计算得到。如Firda等(2009)提出了一种基于W和Ka波段云雷达多普勒功率谱密度数据和两个频段回波强度比值的迭代方法,反演雨滴谱分布和上升速度。主要方法是考虑了雨滴对W波段Mie散射,使得多普勒功率谱产生几个位置固定粒子直径的极大值和极小值,据此来确定空气上升速度;并利用后向散射截面和衰减截面,模拟出两个波段的多普勒功率谱,通过迭代使模拟的多普勒功率谱与雷达实测的多普勒功率谱到达最为接近,从而得到雨滴谱分布;然后在通过多普勒功率谱计算衰减系数,并订正上面的多普勒功率谱和回波强度等。Tridon和Battaglia(2015)提出了一种基于三维变化的空气垂直运动速度、雨滴谱分布和湍流强度的反演方法,利用这些量的观测算子直接计算两个波段的功率谱,然后通过极小化雷达实际观测的W和Ka波段功率谱与计算的功率谱的差,反演空气上升速度、雨滴谱分布和湍流方法。图5给出了双波段云雷达回波强度谱密度观测结果和雨滴谱分布反演结果。
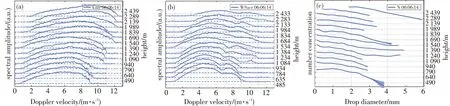
图5 不同高度的Ka(a)和W(b)波段云雷达回波强度谱密度和反演的雨滴谱分布(c)(经过归一化处理,引自Tridon和Battaglia,2015)Fig.5 Reflectivity density data from(a)Ka band,(b)W band and(c)retrieved rain drop size distribution at different levels(Normalized,adopted from Tridon et al.,2015).
双波段云雷达的主要问题是两个波段的一致性。影响两个波段数据一致性的因素主要包括:两个波段天线参数、指向等一致性,发射机、接收机和信号处理的一致性、稳定性,脉冲压缩和相干积累的影响,回波强度、多普勒功率谱的脉动和取样误差等。如Ka和Ku波段云雷达,因衰减对Ka波段回波强度影响更大,Ku和Ka波段的回波强度的差应该随着高度的增加而单调增加,但因波束宽度的差异、相干积累等影响,实际观测结果却与之不同。
4 讨论
云雷达弥补和改进了天气雷达(测雨雷达)对云的探测能力,能提供更准确、分辨率更高的多种云参数的垂直廓线及其变化数据。与天气雷达相比,垂直指向的云雷达获取的多普勒功率谱的应用是非常有特点的。云雷达在云降水物理、人工影响天气等领域越来越受到重视,我国的W、Ka、Ku波段脉冲云雷达得到了长足发展,同时,连续波体制的云雷达也得到广泛的应用,它克服了盲区和多模式观测引起的突变等问题。双波段甚至多波段云雷达也投入到外场试验中,以获取更多的探测影响,改进微物理和动力参数探测能力,同时拓展云雷达对降水系统的观测能力。机载云雷达和星载云雷达也会在不久的将来得到应用。
猜你喜欢
ELLE世界时装之苑(2024年5期)2024-05-14 09:45:39
草原歌声(2020年3期)2020-12-08 22:22:28
学生天地(2020年24期)2020-06-09 03:08:56
小学生导刊(2018年19期)2018-08-21 01:44:50
航空兵器(2017年6期)2018-01-24 15:00:10
农业与技术(2016年24期)2017-04-20 10:20:18
高师理科学刊(2016年8期)2016-06-15 20:27:45
西藏科技(2015年4期)2015-09-26 12:12:58
儿童绘本(2015年7期)2015-05-25 17:55:30
西安电子科技大学学报(2014年5期)2014-07-25 11:29:09
