
MLS接收机精度测试系统的设计
2021-05-20 06:55乌轶聪
现代导航 2021年2期
乌轶聪
(中国电子科技集团公司第二十研究所,西安 710068)
0 引言
微波着陆系统(Microwave Landing System,MLS)是一种精密的进近和着陆引导系统,它由机载设备和地面设备组成,其工作原理是机载设备收到地面设备发射的引导信号后,经过处理计算出飞机相对于着陆跑道的方位、下滑和距离数据,以此来引导飞机进近着陆。某型MLS 接收机(以下简称MLS 接收机)是MLS 机载设备中的测角设备,它主要为飞机提供方位、下滑的角度偏差和地面数据信息。MLS 接收机的精度指标是衡量其性能的重要指标,它直接反映了MLS 接收机在引导准确性方面的能力,MLS 接收机的检测设备二线检测仪没有测量MLS 接收机精度的功能,MLS 内场模拟器虽能测量MLS 接收机精度指标,但无结果判决,存在指标超差显示不直观的缺陷。为有效解决以上问题,本文给出了一种基于虚拟仪器技术开发的MLS 接收机精度测试系统的设计方案。
1 精度的定义和计算方法
按照国际民航组织(International Civil Aviation Organization,ICAO)在《国际民用航空公约》附件10 中对微波着陆系统精度标准的规定,使用航道跟随误差(Path Following Error,PFE)和控制运动噪声(Control Motion Noise,CMN)两个指标来衡量系统的精度。PFE 是指预定飞行航线与飞机跟随制导信号而形成的实际飞行航线之间的误差,这种误差会使飞机偏离航向道或下滑道。CMN 是由较高的角频率信号产生的误差,这种误差影响飞机的舵面和操纵杆的抖动,并有可能影响飞机姿态的摆动[1]。ICAO 规定PFE 和CMN 分别用PFE 滤波器和CMN 滤波器来测量,模拟滤波器的系统函数[2]为:
将模拟滤波器离散化转变为数字滤波器,可推导出PFE 和CMN 数字滤波器的差分方程[1]为:

PFE 和CMN 的评估原理如图1所示。根据以上理论得到PFE 和CMN 的算法后,将MLS 接收机输出的角度数据按照PFE 和CMN 的相关算法进行运算,就可以得到MLS 接收机的精度数据。
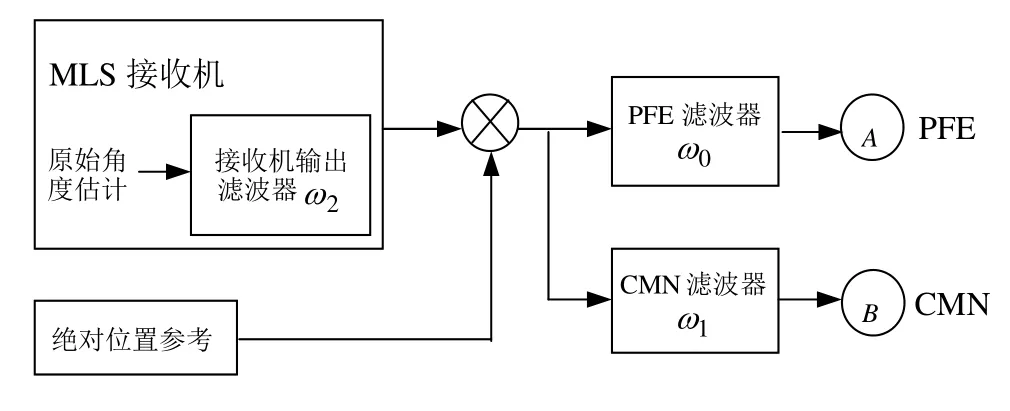
图1 MLS 接收机PFE 和CMN 的评估原理
2 总体设计
2.1 需求分析
根据GJB2598-96《微波着陆系统机载设备通用规范》的要求,MLS 接收机精度测试需要完成以下任务:
(1)给MLS 接收机加电并进行参数设置,设置通道号、进场方位角度和下滑角度,使其进入工作状态;
(2)观察接收机状态,即接收机返回的通道号、进场方位角度和下滑角度是否与设置一致,使用MLS 信号源给接收机输入MLS 信号,使其开始正常工作,观察其是否告警,启动自检,观察接收机是否存在无故障;
(3)在接收机无故障且不告警的正常工作状态下,读取接收机精度指标PFE 和CMN 值;读取接收机返回的方位和下滑的实际角度;观察ARINC429 信号波形并读取其幅度与频率值,最后观察以上指标是否超差。
基于以上任务,MLS 接收机精度测试系统需要完成的功能是:
(1)给MLS 接收机加电并设置工作参数;
(2)显示MLS 接收机状态;
(3)根据MLS 接收机的输出数据,计算和显示出MLS 接收机的精度指标PFE 和CMN 值并判决是否超差;
结果显示,随着三棱、莪术提取物质量浓度的增加,其对SW620细胞的抑制率也相应升高。不同质量浓度三棱、莪术提取物作用后的细胞增殖抑制曲线见图1。根据该曲线求算得三棱提取物IC30为3.24 μg/mL,IC50为4.69 μg/mL;莪术提取物IC30为11.27 μg/mL,IC50为16.81 μg/mL。
(4)显示ARINC429 信号波形,并测量出其幅度与频率值。
MLS接收机精度测试的设备连接图如图2所示。
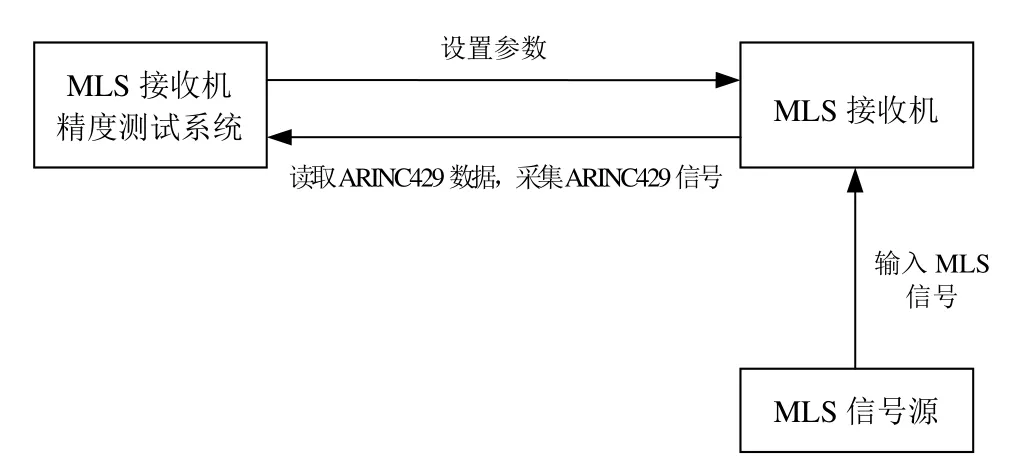
图2 MLS 接收机精度测试设备连接图
2.2 设计原理
根据以上需求分析,MLS 接收机精度测试系统可以采用虚拟仪器的原理来设计。虚拟仪器是用软件将计算机硬件和仪器硬件有机地结合起来,以计算机和仪器为载体,通过应用软件实现数据的处理、存储和显示,最终完成测试和控制功能的仪器开发模式。本系统采用虚拟仪器的开发模式具有以下优点:
(1)开发周期短。设备硬件一般采用计算机和数据板卡,具有通用性,采购方便的特点;软件开发平台成熟,流程系统化,编程易上手。
(2)可拓展性强。设备不论硬件还是软件,都采用模块化,如需拓展设备功能,硬件只需增加数据板卡,软件添加相应的程序模块即可。
(3)设备性能强大,可靠性高。依靠先进的PC 技术,设备有强大的数据处理能力,稳定的操作系统也为系统的可靠性提供了有力的支撑。
MLS 接收机精度测试系统的具体设计方案是:使用一台计算机作为精度测试系统的硬件平台,根据MLS 接收机输出信号的特性,给计算机加装相应的数据板卡,在应用软件的控制下板卡与MLS接收机进行数据交换,完成向接收机发送数据和采集接收机输出数据的任务,同时应用软件对得到的数据进行处理,最终使系统实现如接收机设置、精度指标的计算、判决和数据的显示等功能。
3 详细设计
MLS 接收机精度测试系统的总体设计思路就是通过应用软件控制计算机和数据板卡来完成其测控功能,以下从系统的硬件和软件两方面来具体介绍其详细设计。
3.1 硬件设计
计算机主机采用主流PC机配置,使用Windows操作系统,内部提供 PCI 插槽以方便安装ARINC429 总线接口板和图形处理板,并配置USB接口,外部安装键盘和鼠标等标准输入输出设备,显示器使用液晶显示器。MLS 接收机的参数设置数据和输出数据都采用ARINC429 总线格式,所以必须使用一个ARINC429 总线接口板来完成系统与接收机的数据交换,ARINC429 总线接口板可以选用EP-H6272 型ARINC429 总线开发应用板。该板采用PCI 总线接口,板上有四个ARINC429 收发芯片,每个收发芯片包含一个发送通道和两个接收通道,可作为ARINC429 数据总线上的数据源或者接收和分析ARINC429 总线数据。当接收数据时,收发芯片将接收来的数据交给板上专用的FPGA 加DSP电路进行处理,而后将数据通过PCI 总线传送给计算机。由于要显示ARINC429 信号波形并测量其幅度和频率,可以选用EP-H6024A 型高速高精度并行数据采集卡来完成信号的采集。EP-H6024A 是并行方式8 通道A/D 采集卡,最高采样率1 MHz,具有8 路模拟信号输入、外触发和外时钟信号输入。A/D 转换分辨率为12 位,采用单端/差分可选输入方式,每通道8 个量程档可独立选择。采样长度为每通道1M 个采样点,供存储A/D 转换数据用。MLS接收机供电电源使用明纬LRS-350-24型电源,电源输入使用计算机的220 V 交流电,将输出调节为直流28 V 为接收机供电。电源设置开关,开关与电源输出连接器一并安装于PCI 位挡板上,与其他板卡接口并列于机箱上,方便电缆连接。连接电缆一端连接MLS 接收机,另一端分出三个连接器,分别和ARINC429 总线接口板、图形处理板与接收机供电电源连接,电缆中供电电源线直接连接接收机电源输入端,接收机ARINC429 信号输入端连接ARINC429 总线接口板,接收机ARINC429 信号输出端分别连接ARINC429 总线接口板和图形处理板。
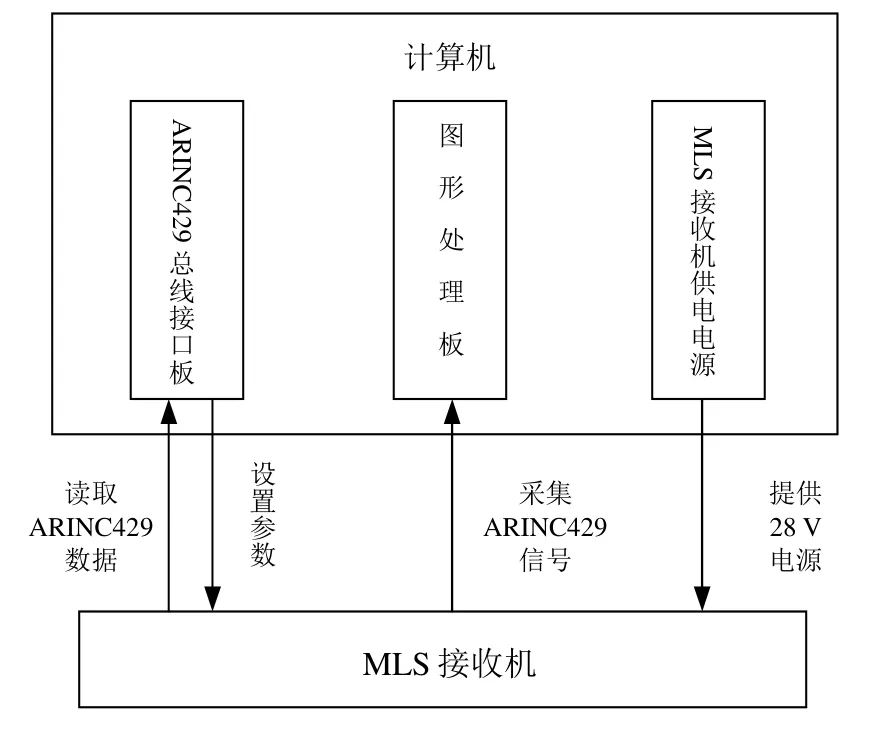
图3 MLS 接收机精度测试系统结构组成图
3.2 软件设计
按照虚拟仪器中软件就是仪器的思想,软件是虚拟仪器系统的关键。虚拟仪器软件系统主要分为四层结构:系统管理层、测控程序层、仪器驱动层和I/O 接口层[3]。MLS 接收机精度测试系统以计算机为硬件平台,使用Windows 操作系统,用到的板卡ARINC429 总线接口板和图形处理板都是专业公司的货架产品,均提供Windows 操作系统下的驱动程序,所以只需要开发出测控软件即可完成精度测试系统的软件开发。MLS 接收机精度测试系统的测控软件可以使用Lab Windows/CVI 来完成开发。Lab Windows/CVI 是一款基于ANSI C 的集成开发环境,它将C语言与虚拟仪器软件工具库结合起来,使用交互式编程方法,提供多样的功能面板,不但提高了用户的编程效率,而且提升了软件效果,是测控应用软件的理想编程环境。
根据总体设计中MLS 接收机精度测试系统需要完成的功能,系统测控软件可分为四个模块:接收机设置模块、接收机状态模块、接收机精度模块和ARINC429 信号波形显示模块。接收机设置模块完成设置接收机的通道号、进场方位角度和下滑角度功能,还包括接收机的启动自检与停检功能。接收机状态模块显示接收机返回的通道号、进场方位角度、下滑角度和告警状态。接收机精度模块显示接收机精度指标PFE、CMN 值和接收机返回的方位和下滑的实际角度值,并显示指标的判决结果。ARINC429 信号波形显示模块显示ARINC429 信号波形和其幅度与频率值。MLS 接收机精度测试系统测控软件的用户界面如图4所示。
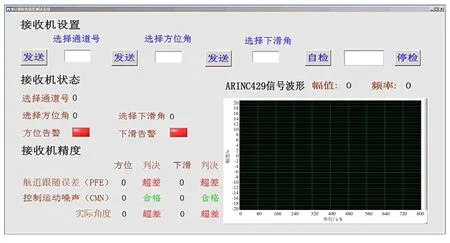
图4 MLS 接收机精度测试系统测控软件的用户界面
按照Lab Windows/CVI 编程的基本步骤,测控软件的开发过程分为以下6 个阶段:
(1)创建工程文件:启动Lab Windows/CVI 后,新建一个工程目录并命名,开始软件制作。
(2)仪器面板的设计:进入工程文件编辑环境,建立仪器面板,按照功能需求添加各种控件,并设置其相关属性。
(3)源程序文件的生成:完成面板和控件的设计后,进入代码菜单,生成程序的主函数和各种回调函数,产生程序的主框架。
(4)添加程序代码:根据软件需要完成的功能,给主函数和各个回调函数中添加程序代码,来完成编程。
(5)编译调试:完成整个程序的头文件、用户界面文件和源代码文件的编制后,进行程序的编译、调试和运行。
(6)生成执行文件和安装文件:当程序编译、调试完毕后,创建一个可执行文件,设置测控软件的图标和标题等,最后将软件打包成安装文件,完成测控软件的制作。
4 总结和展望
MLS 接收机精度测试系统是MLS 接收机专用内场检测设备,它可以完成MLS 接收机工作状态设置、显示接收机状态、测量接收机精度和监测接收机输出信号等功能,较之前测试方式不仅操作更加简单,而且增加了测试功能,极大提高了MLS接收机的测试效率。该系统测控软件使用 Lab Windows/CVI 平台开发,软件界面友好,系统运行稳定,可靠性强。MLS 接收机精度测试系统目前仍采用人工操作的半自动化测试方式,随着虚拟仪器技术的日新月异,今后该测试系统可以向着自动测试、自动记录和自动输出测试结果等全自动化测试方向发展。
猜你喜欢
测控技术(2018年2期)2018-12-09
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
电子制作(2017年13期)2017-12-15
电子制作(2017年1期)2017-05-17
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
太空探索(2016年12期)2016-07-18
