
研究侧扫雷达测流系统功能与应用
——以允景洪水文站为例
2021-05-17 07:02:46赵正军
水利科学与寒区工程 2021年2期
赵正军
(云南省水文水资源局西双版纳分局,云南 景洪 666100)
1 侧扫雷达测流系统功能
侧扫雷达对网络点流速的监测,是借助非接触式雷达技术进行连续性监测,以实现对河流表面流场的监测,通过互联网技术提供数据服务。侧扫雷达在工作时每5 min完成1次自动测量(时间依据需求设置),河流流量数据的合成依据流速比的数据交互来完成。
侧扫雷达系统主要由天线系统和雷达系统两部分组成,采用天线共址、收发分开的模式,并兼容调频连续与脉冲多普勒体制[1]。
侧扫雷达工作时,先发射电磁波信号,由于水的流动会产生波浪,所以当信号投射到水面时则与波浪相互作用,如果电磁波波长达到波浪长度的一倍,则形成最强的后向散射电磁波信号,而河水的回波信号以Bragg散射为主。水的波浪有前进波与后退波两种,后退波处理时可以独立进行,因为能量能够分离[2]。当水面流速不为零时需要再叠加一个频率偏移量,频偏大小与水面流速大小及方向有关,频偏正、负数均可。
2 侧扫雷达测流系统设计和组成
2.1 雷达测流仪设计
设计时首先要确定发射信号波长,由于测流仪的体积由波长确定,波长越短体积越小,所以尽可能选择短波长。河流表面所产生的波浪其波长能满足布拉格散射条件,要想使散射信号强则确定选择较长波长,电磁波波长选取0.72 m。其次,工作方式。采用天线共址,收发分开,信号采用直接射频采样,运用多重信号超分辨处理算法,提高测向分辨率,采用DDS技术间接频率合成,运用多普勒软件处理,以太网通信技术进行传输。再次,设计信号波束。须充分考虑河流中过往船只,在上、下游和前方分别设置3个独立且指向这三个方向的波束。处理原始数据时,内河剔除船只信号采用三取二的滤波法,设计2个对称波束,基于内河过往船只通常产生1个波束。雷达比测试验选用Ridar-200型测流仪,探测距离大于200 m。
2.2 其他设备设计
采用水文专用RTU设备,但该设备必须支持4G通信移动网络,同步兼容2G、3G、4G联通与移动网络,对电信网络只兼容4G。测流系统设计Wi-Fi网络。供电设备有200W光伏组件一块,80A·h锂电池,供电控制箱。
2.3 安装位置设计
在充分考虑电磁环境、干扰防护的前提下,安装时应与干扰源如电站、工业等设施保持安全距离,允许接收机灵敏度损失在1 dB范围内。单台雷达测流仪安装的位置应距离河水5 m以上,依据探测的距离确定安装架高度。假设B为河道宽度,H为天线安装高度,夹角α要在1.5°以上。α是波束与探测最远点间的夹角,H与B的比可求出α的正切。对于800型测流仪,需考虑与安装架的最近距离,β角(近端视角)在45°以下,安装架要高于26 m。雷达测流仪安装位置固定后,对水平补偿距离进行设置,即设置测流仪与断面起点之间的距离,使雷达测流仪测量断面上水平位置、测量垂线位置相一致[3]。雷达测流仪应安装在平直的河道上,平直长度在200 m以上(上下游),要远离水坝、水库。天线与河面间必须是开阔的区域,以安装点为基准到河对岸区域保持左右60°视角,在此范围内不能有建筑物、植物、桥梁等。
3 侧扫雷达测流系统数据处理
3.1 侧扫雷达表面流速比测
因允景洪水文站自2012年后已将走航式ADCP作为常规测流方式,故仅采用M9型走航式ADCP与侧扫雷达进行表面流速同步比测。由于走航式M9具有输出全剖面流速功能,则可以将M9 测流成果的第一层流速数据(换能器入水深度0.1 m)近似当作该断面不同位置的表面流速。受上游电站控制影响,比测期间允景洪水文站水位变幅较小,通过在比测断面分别进行低水位、中低水位流量测验,每次施测2个测回,分别提取4个测次的表层流速,分析侧扫雷达表面流速数据的准确性[4]。
比测期间水文情势:允景洪水文站水位级划分为低水位(<535.04 m)、中低水位(535.04~536.60 m)、中水位(536.60~539.63 m)、高水位(≥539.63 m)。为了验证侧扫雷达表面流速的准确性,允景洪水文站按水位分布分别于8月14日、10月22日进行了2次侧扫雷达表面流速比测。其中,8月14日比测期间水位变化为535.00~535.03 m,属于低水水位级;10月22日比测期间水位维持为536.09 m,属中低水水位级。
3.2 侧扫雷达表面流速与断面平均流速关系率定
比测期间采用走航式ADCP 施测不少于30 份流量(因受上游景洪电站控制影响,允景洪水文站水位处于中低水期,无法控制高中低水,水位变幅仅为535.02~536.09 m),利用实测流量计算侧扫雷达测流断面的平均流速,与侧扫雷达获取的河流表面流速计算的指标流速建立相关关系,通过符号检验、偏离检验和适线检验对相关关系进行验证[5]。
采用水文缆道牵引M9型走航式ADCP在测流断面进行1次流量测验,施测2个测回,分别提取4个半测回的表层流速平均,与侧扫雷达流速(同步施测时段内平均)叠加到横断面流速分布图进行对比。各测次比测分析情况如下:
(1)比测次数。自8月8日安装完成后,开始比测工作,至10月31日,一共完成43次比测。
(2)低水比测成果。2019年8月14日比测期间水位变化535.00~535.03 m,属于低水水位级,水面宽238 m,侧扫雷达水面测速单元26个(单元间距10 m),有效流速单元24个(起点距71.1~301.1 m,有效流速单元指的是置信度高于80%的流速单元,置信度分布参见图1)。比测分析图见图2。
从图2可以看出,低水水位级侧扫雷达表面流速相较ADCP表层流速分布右岸偏小,其余部分均以偏大为主,且从右向左偏大程度递增,比测结果见表1。

图1 侧扫雷达各单元流速及置信度分布图
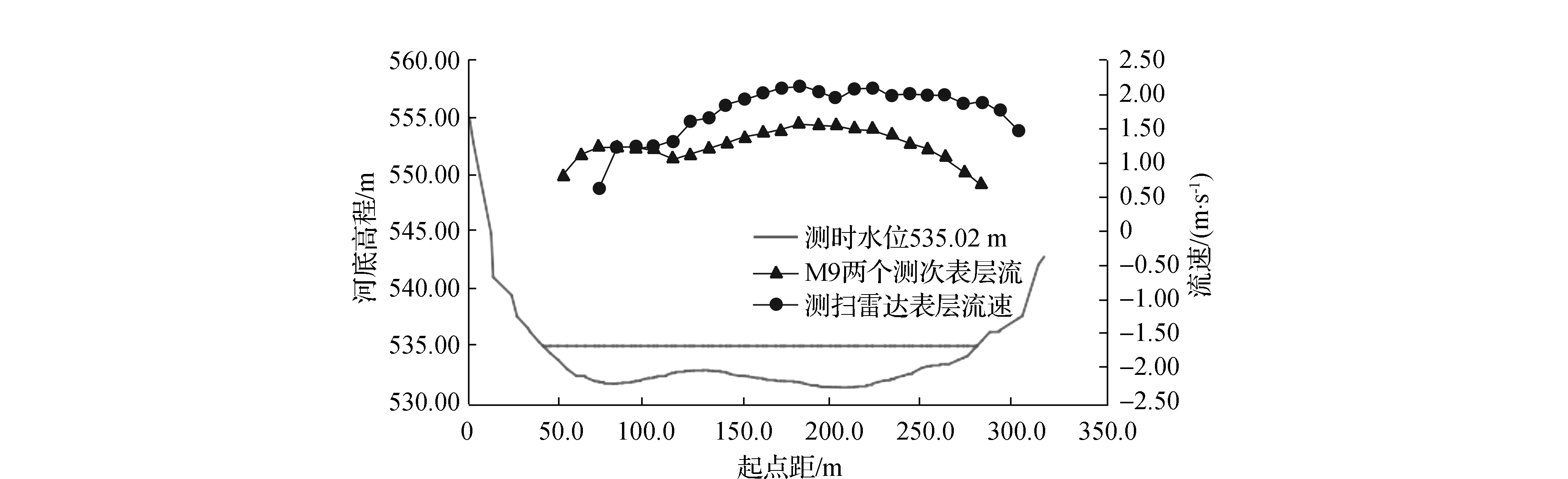
图2 低水水位级侧扫雷达表面流速与走航式ADCP表层流速比测分析图
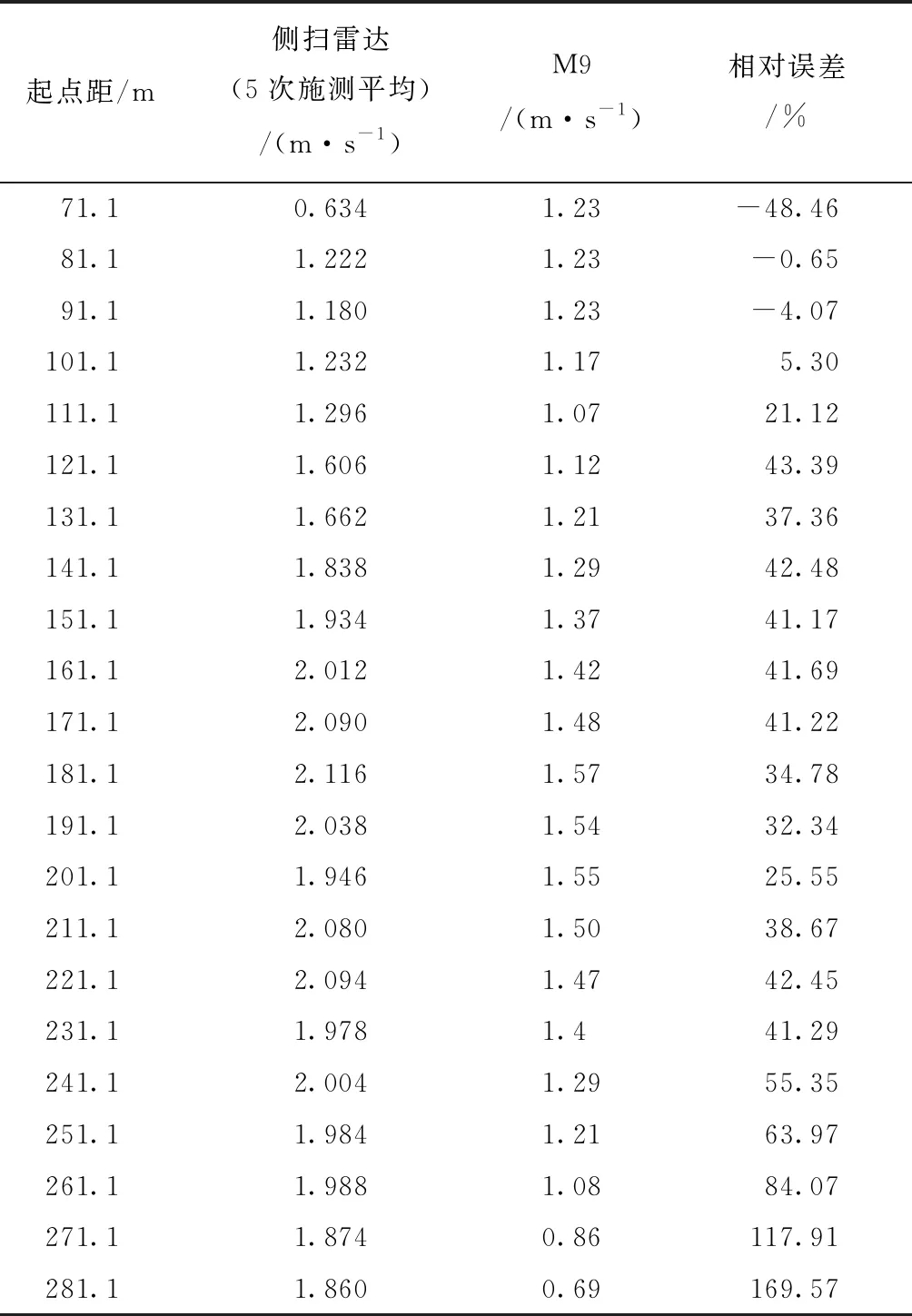
表1 低水水位级侧扫雷达与M9型走航式ADCP表层流速平均值对比
从表1可以看出,低水水位级ADCP表层流速与侧扫雷达表面流速相比,相对系统误差较大。
(3)中低水比测成果
2019年10月22日比测期间水位为536.09 m,属于中低水水位级,水面宽250m,侧扫雷达水面测速单元26个,有效流速单元24个(起点距71.1~301.1 m)。
从图3可以看出,中低水位级侧扫雷达表面流速相较ADCP表层流速分布右岸波动幅度较大,中部一致,自中部向左岸侧扫雷达表面流速较ADCP表层流速偏大程度递增,比测结果见表2。
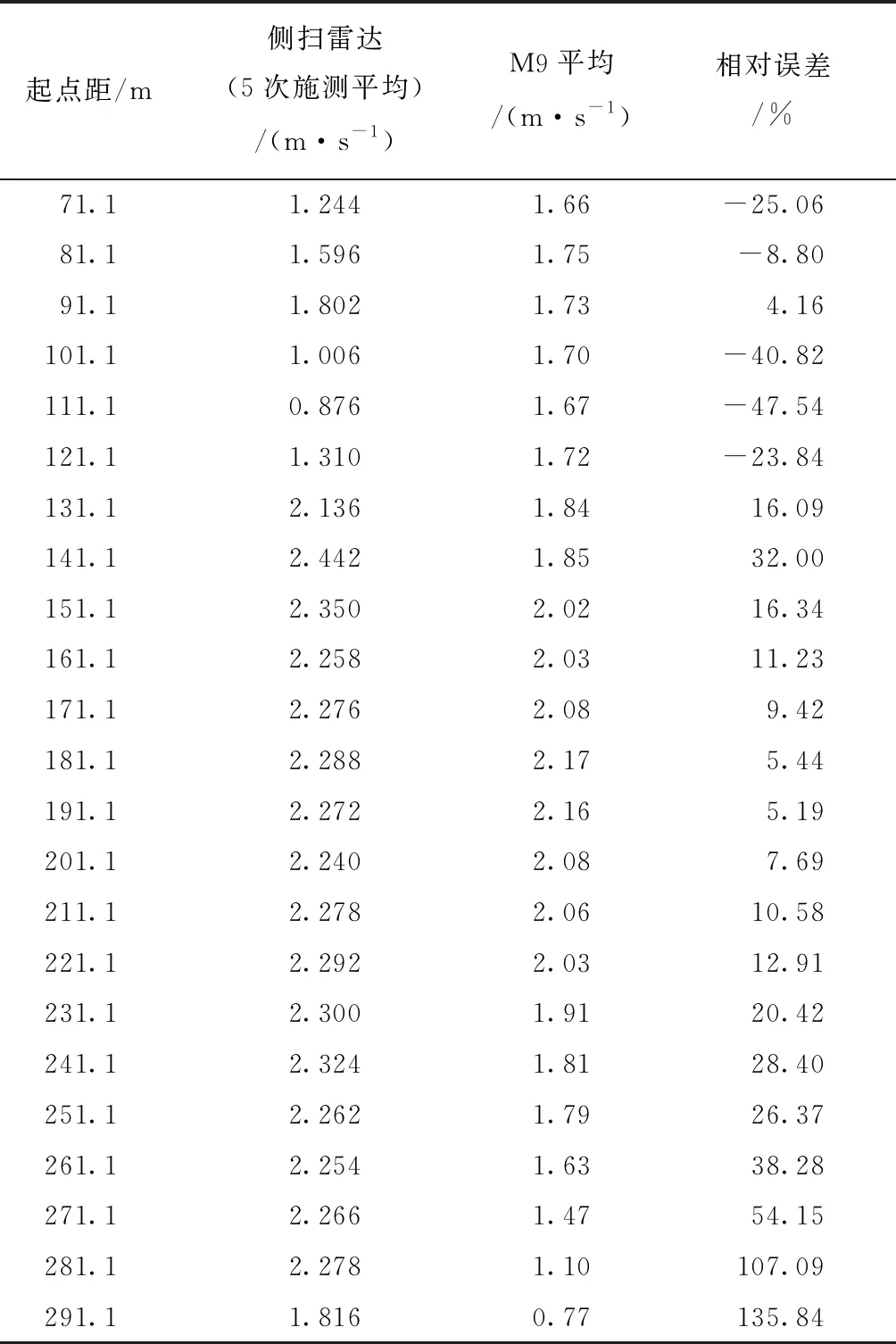
表2 中低水水位级侧扫雷达与M9型走航式ADCP表层流速平均值对比

图3 中低水水位级侧扫雷达表面流速与走航式ADCP表层流速比测分析图
4 结 语
综合上述分析,借助雷达获取水文站水域间的河流表面流速,有效开展比测分析工作,对各水位级流量能够实现在线监测,通过雷达测量的数据具有较高的准确性,系统误差、随机不确定度、流量测验均达到规范要求,侧扫雷达推算的流量基本上与整编值保持一致,达到推流定线的要求。研究结果表示,侧扫雷达测流系统可以用于大面积水域的流速测量,对河流、湖泊均可应用。
猜你喜欢
交通企业管理(2022年5期)2022-09-02 06:55:18
黑龙江水利科技(2022年4期)2022-05-25 13:30:48
石河子科技(2022年4期)2022-03-24 05:45:28
治淮(2021年6期)2021-08-05 08:55:56
航空动力(2020年6期)2021-01-05 09:02:50
山东水利(2018年6期)2018-03-24 13:00:35
现代工业经济和信息化(2016年2期)2016-05-17 05:34:28
现代工业经济和信息化(2016年2期)2016-05-17 05:34:15
水利科技与经济(2016年8期)2016-04-22 03:41:46
海洋科学(2011年5期)2011-01-11 14:41:58
