
集装箱船纵倾优化数值模拟
2021-05-17 07:18杨其雷朱鹏飞艾万政
舰船科学技术 2021年4期
杨其雷,朱鹏飞,艾万政
(1.浙江国际海运职业技术学院,浙江 舟山 316022;2.浙江海洋大学,浙江 舟山 316022;3.银川能源学院,宁夏 银川 750105)
0 引 言
国际海事组织IMO(International Maritime Organization)针对航运业温室气体排放制定了技术性国际海运GHG(Greenhouse Gas)条例[1-2]。同时,全球航运业市场低迷,竞争激烈,节能减排成为航运研究的重点。船舶纵倾优化是IMO推荐的船舶节能减排技术手段之一,可以在不改变船舶航速和载重量的情况下,通过调节船舶在航行中的纵倾角,减小其航行阻力。与其他节能减排的方法相比,具有成本低、易实现和效果佳等优点。由于受限于船型原因,很少有学者进行这方面的工作。
研究方法通常有模型试验和CFD(Computational Fluid Dynamics)数值计算,邵世明等[3]和邱斌彬等[4]通过对水池实验和实船试航数据证明了纵倾优化的有效性。宋磊等[5]、Coraddu等[6]和童骏等[7]以CFD方法和数据分析的方法,对于肥大型船舶纵倾优化进行了研究。集装箱船近年来大型化和快速化趋势日益明显,并且多以班轮运输方式运营,对纵倾优化的研究与应用有更多的需求。本文以标准船模KRISO Container Ship (KCS)集装箱船为对象,利用STARCCM+ RANS求解器对集装箱船纵倾优化进行数值研究,提出集装箱船经济航速时的最佳纵倾角,为集装箱船在实际营运中最佳纵倾操作提供建议。
1 船型尺度及特征
本文选取KCS标准集装箱船进行研究,此船型是由韩国海洋与海洋工程研究所提供的比较研究船型,此船型具有大量实验和模拟数据可供检验和验证,是ITTC推荐船型之一。KCS集装箱实船船垂线间长230 m,型宽32.2 m,设计吃水10.8 m,设计航速为24 kn。为与实验数据进行对比,本文采用缩尺比为λ=31.6的模型,模型如图1所示,具体参数如表1所示。本文所用实验数据来源于KRISO和东京CFD研讨会。
2 数值模型及网格划分
2.1 数值模型
采用RANS控制方程组,包括连续性方程和动量守恒方程,其不可压缩流体无量纲RANS方程的张量形式为:
式中:ui为雷诺平均速度分量;P为压强;为脉动速度。
湍流模型计算中采用Realizablek-ε湍流模型,自由液面采用VOF(Volume of fluids)方法进行捕捉。
2.2 计算域及边界条件
考虑到计算效率,计算时采用的是对称模型,以船模中纵剖面为对称面。为避免计算域边界对计算的影响,本文根据以往研究者的经验[8],计算域入口在船首上游1.5Lpp,出口在船尾下游2.5Lpp,侧面距离船侧2Lpp,顶部距离自由液面1.5Lpp,底部距离船底表面2Lpp处,计算域设置如图2所示。边界条件设置如表2所示。

图2 计算域设置Fig.2 Computational domain setting
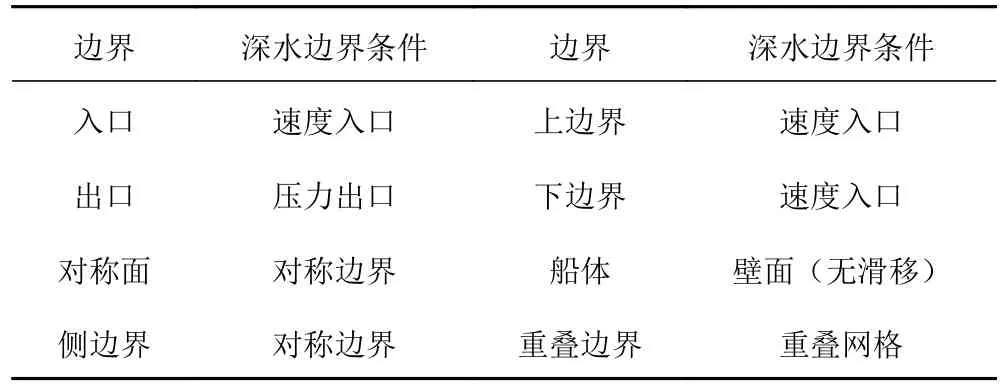
表2 边界条件设置Tab.2 Boundary condition setting
2.3 网格划分
为方便调整船舶纵倾,节省网格划分的工作量,对于船舶纵倾优化的研究采用重叠网格(Overset mesh)技术。计算域被分为背景区域和重叠区域。背景区域和重叠区域采用切割体网格进行网格划分,并为捕捉自由液面和准确的计算船舶周围流场,对自由液面和网格重叠的区域进行网格局部加密,船体周围的边界层网格采用棱柱层网格进行划分,并在船首和船尾流场的复杂区域进行局部网格加密,以捕获更多流动细节。
Realizablek-ε湍流模型对近壁面流场的处理采用壁面函数法,需要检查第1层网格节点布置y+,对于Realizablek-ε湍流模型,一般认为30~60为合理[9]。经过对近壁面边界层网格的多次调整,y+值处于30~60之间,网格量75万,网格如图3所示。
3 计算结果及分析
3.1 数值方法验证
计算域网格的划分与边界条件设置对计算求解精度与稳定性有很大影响[10],对初始状态为平吃水的KCS船模在不同傅汝德数下的船舶阻力进行计算,验证网格、边界条件和求解技术的准确性,并将总阻力、纵倾和下沉量的计算值与2015年东京研讨会[11]提供的实验结果进行对比。船舶总阻力系数Ct表达式为:
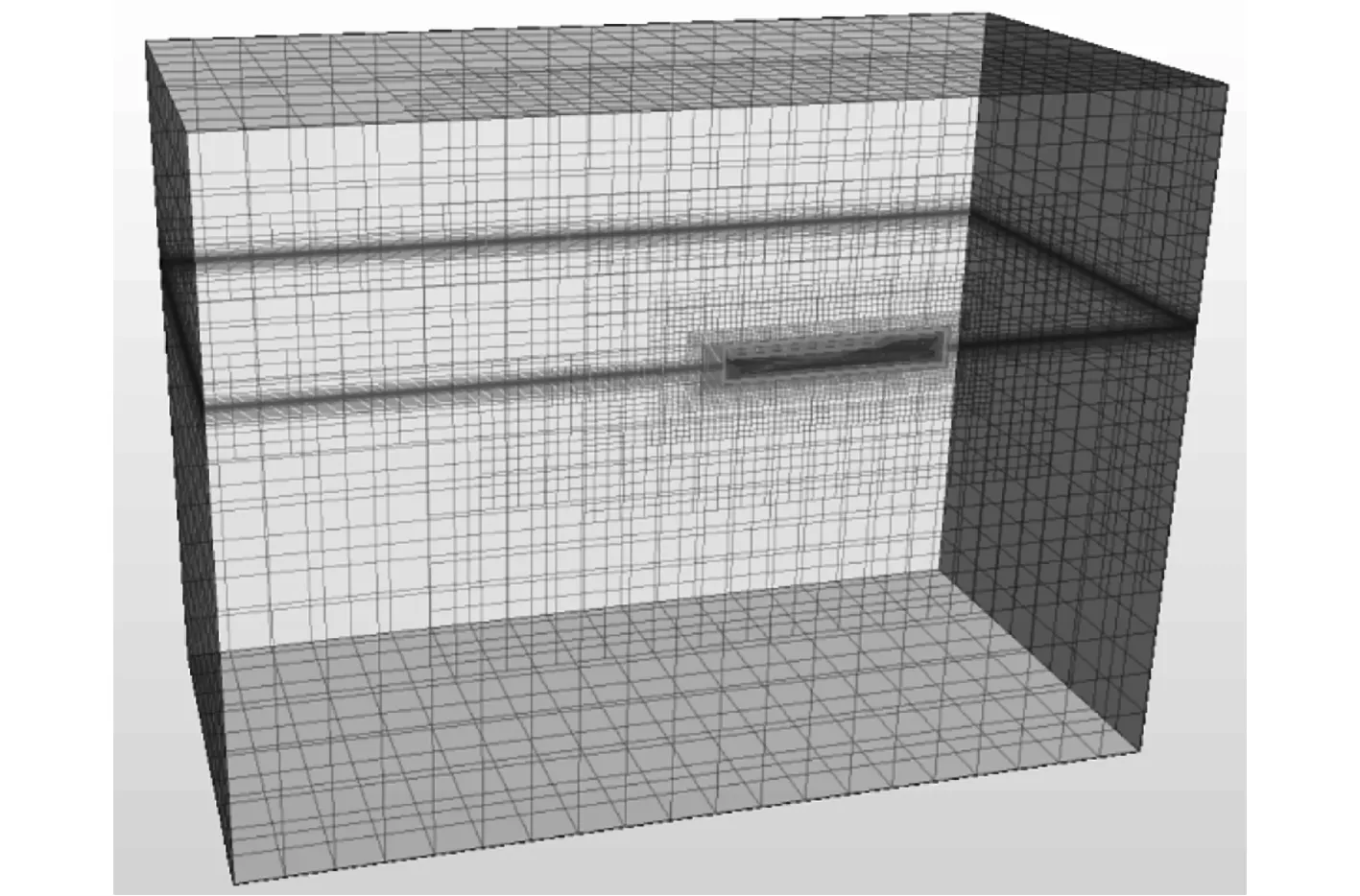
图3 计算域网格Fig.3 Computational domain grid
式中:Rt为船舶总阻力;U为船模速度;ρ为水密度;SW为船模的湿表面积。
总阻力、纵倾和下沉量的数值计算结果与实验数据对比如图4~图6所示,通过图中数据对比,总阻力、纵倾和下沉量的计算值与实验数据十分接近,证明本文方法可以进行纵倾优化的数值计算。
3.2 纵倾优化数值计算及分析
采用验证后的网格划分和数值方法,对不同纵倾条件下的KCS船模进行阻力计算,吃水状态为满载吃水0.34 m,纵倾值调节范围从0.02~0.1 m的尾倾和0.02~0.1 m的首倾,纵倾每次调节幅度为0.02 m,航速为Fn=0.227的经济航速。各纵倾状态下的船舶总阻力如图7所示,负值为首倾,正值为尾倾。
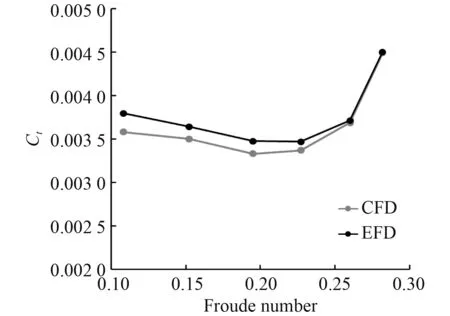
图4 总阻力系数对比Fig.4 Comparison of total drag coefficient
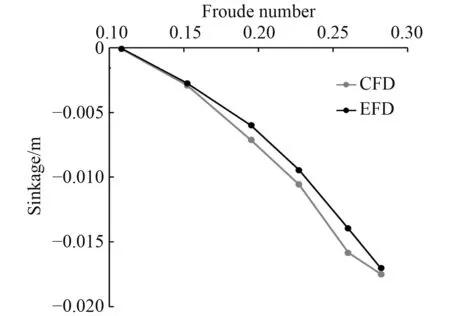
图5 下沉量对比Fig.5 Subsidence contrast
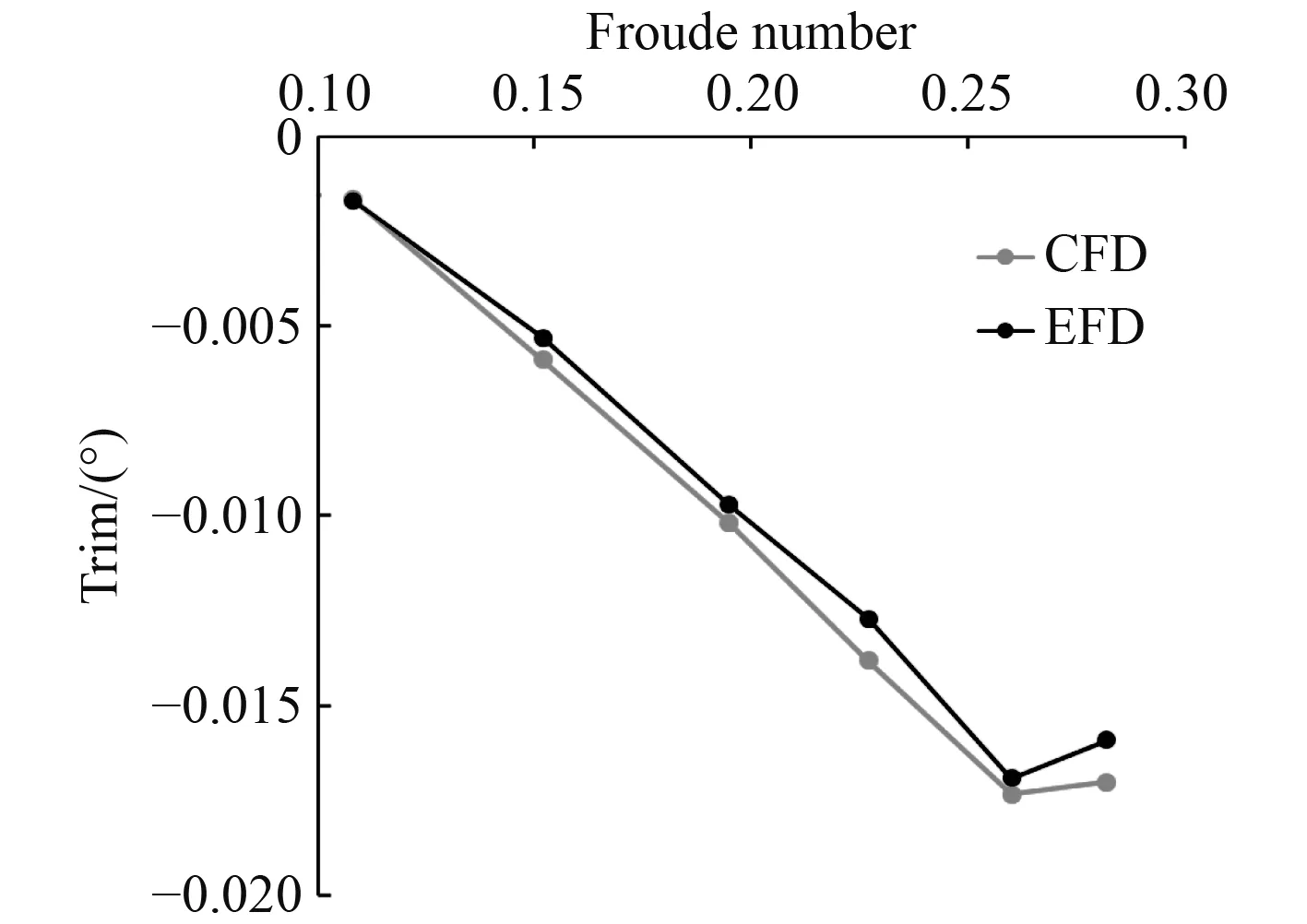
图6 纵倾对比Fig.6 Contrast of trim
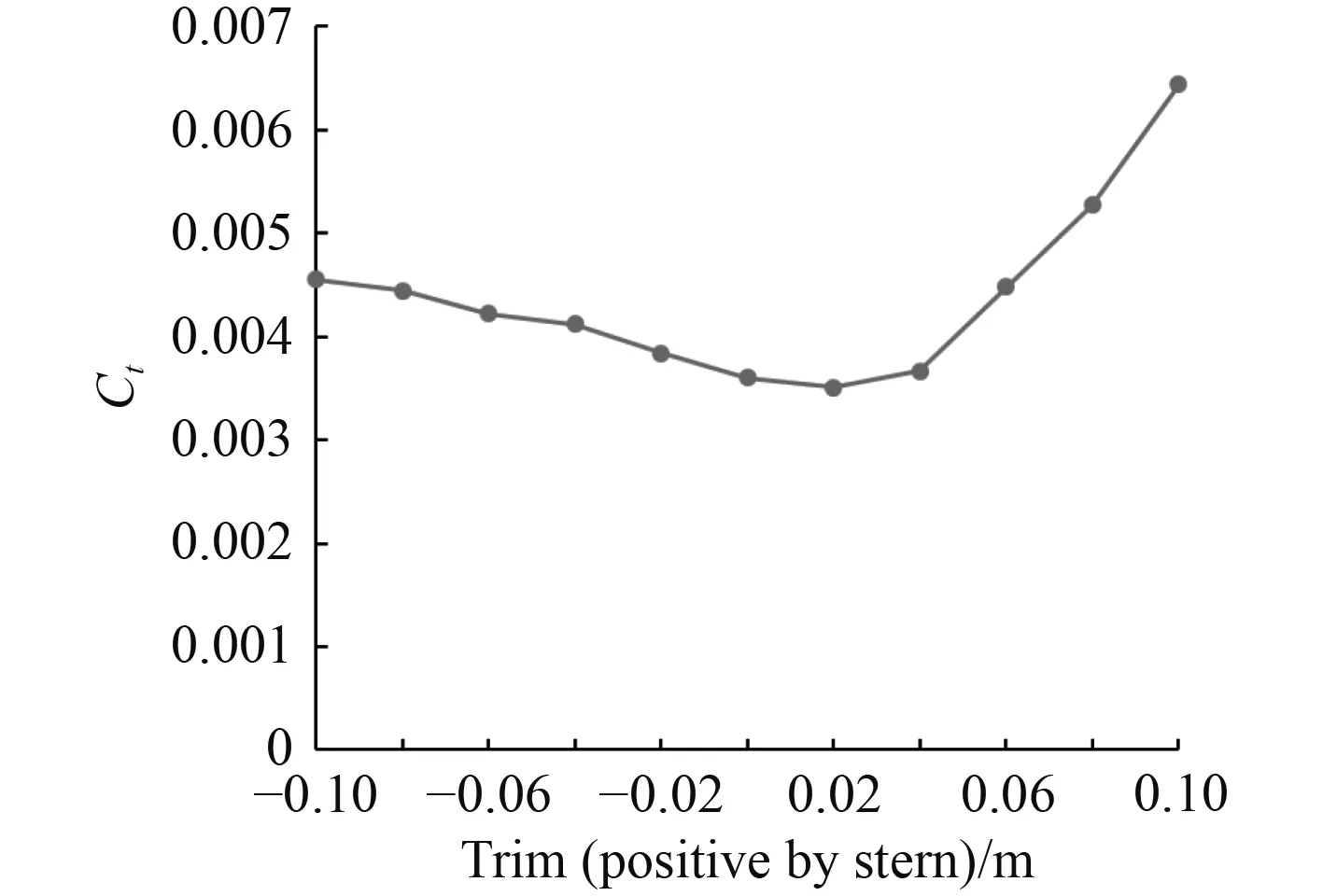
图7 各纵倾下总阻力系数Fig.7 Total drag coefficient at each trim
在经济航速时,以最大阻力值为基准,纵倾优化导致的阻力变化率如表3所示。
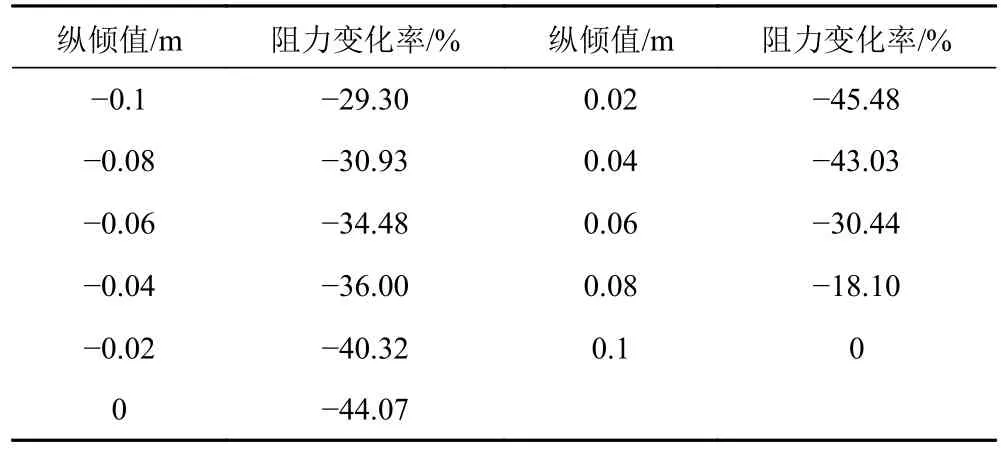
表3 阻力变化率Tab.3 Rate of resistance change
与平吃水状态相比,当船舶处于首倾状态时,船舶总阻力随着首倾的增加而增加,当船舶处于尾倾状态时,随着船舶尾倾状态的增加,船舶总阻力先减小,当尾倾超过0.02 m后,船舶总阻力开始明显增加。最佳纵倾值为尾倾0.02 m,其阻力与阻力最大时相比减少约45.48%,阻力减小非常明显。考虑到船舶尾倾时,其螺旋桨推进效率更高,其节能减排的效果更好。
为分析不同纵倾下总阻力发生变化的原因,将总阻力Rt分为摩擦阻力Rf和剩余阻力Rr[12],阻力及其系数表达式如下:
各部分阻力随纵倾变化如图8和图9所示。
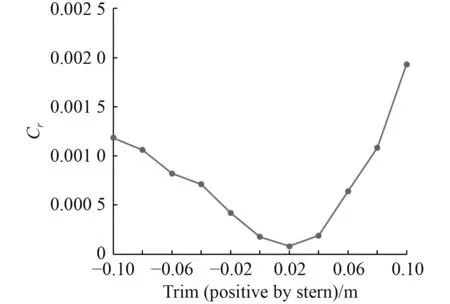
图8 各纵倾下剩余阻力系数Fig.8 Coefficient of residual resistance at each trim
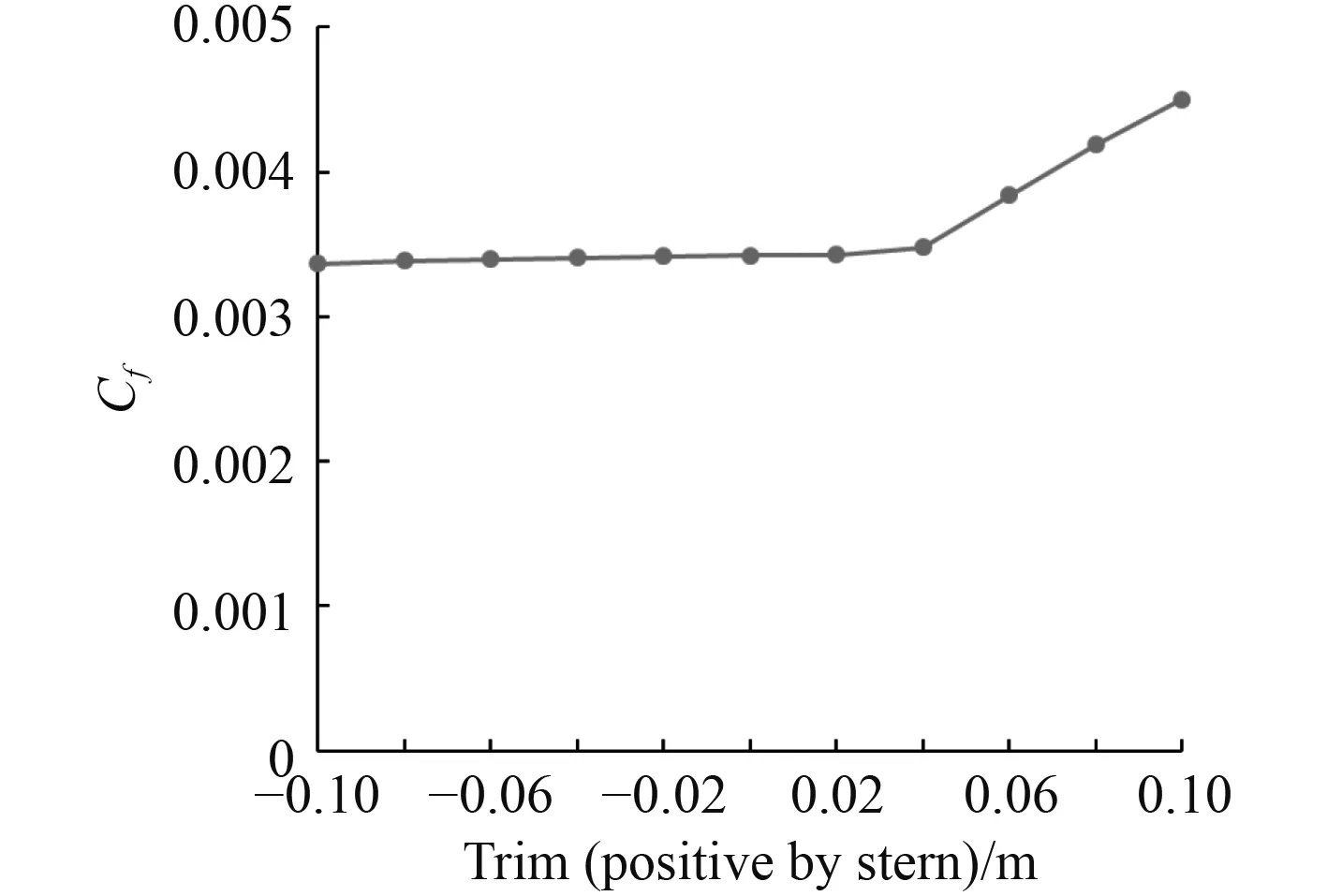
图9 各纵倾下摩擦阻力系数Fig.9 Coefficient of frictional resistance at each trim
通过图中数据,发现剩余阻力系数在船舶首倾和尾倾状态下,都随着纵倾值的增加,剩余阻力系数增加,尾倾状态比首倾状态剩余阻力增加明显。而摩擦阻力系数在船舶首倾状态时,随着首倾增加,摩擦阻力系数缓慢减少,当船舶尾倾时,随着尾倾的增加,摩擦阻力系数先平缓增加,后明显增加。可以看出,在首倾时,剩余阻力的变化决定了不同纵倾下总阻力的变化趋势,而在尾倾时,剩余阻力和摩擦阻力共同决定了不同纵倾下总阻力的变化趋势。这是由于船舶阻力与排水量、水深、船速和纵倾角有关。船舶在排水量一定的情况下,改变纵倾角,船舶水下部分几何形状发生改变,船体水线形状和水线长度、浮心位置、船首来流、船尾去流也相应改变,且尾倾时较首倾时变化更大,导致船舶航行时阻力发生改变。
4 结 语
本文通过对调节纵倾来改善船舶总阻力的原理进行分析,以标准船模KCS集装箱船为对象进行船模阻力实验,采用RANS方法和Realizablek-ε湍流模型对不同纵倾状态下的阻力进行了计算,得出如下结论:
1)采用RANS方法和Realizablek-ε湍流模型对集装箱船船舶阻力的数值计算与船模水池实验结果误差较小,结果可靠度高;
2)排除水深影响,KCS集装箱船在不改变船舶航速、载重量的前提下,仅通过纵倾调节可以使船舶阻力达到最小,节能减排的作用明显;
3)试验以及仿真计算中所得减阻数据和结论可以为KCS集装箱船舶以及类似船舶的实际运营提供指导,船舶纵倾优化是一种不需要改变船体构造、不附加安装设备的节能方式,不仅不降低船舶载货量、不降低航速、易于实施,并且效果显著。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
上海船舶运输科学研究所学报(2021年2期)2021-10-12
疯狂英语·读写版(2021年8期)2021-09-17
作文周刊·小学一年级版(2020年8期)2020-05-11
集装箱化(2014年12期)2015-01-06
集装箱化(2014年11期)2014-12-17
小学生时代·大嘴英语(2014年6期)2014-11-04
集装箱化(2014年8期)2014-09-17
航海(2014年4期)2014-08-28
中学科技(2009年5期)2009-12-17
