关于未知环境下多无人机协同搜索动态目标的研究
2021-05-16 02:03:58唐攀
科学与信息化 2021年12期
唐攀
四川大学 电子信息学院 四川 成都 610065
1 搜索环境描述与建模
1.1 场景描述
1.2 实验参数设置
根据环境大小和动态目标个数动态变化,但会保证每个算法都设置相同的最大迭代次数。假设目标环境的大小为100m×100m,无人机最大速度是1m/s,那么最大迭代次数就设置为200。对于存在续航能力有限的动态目标搜索问题,任务的主要目标则是在规定时间内找到尽可能多的目标。在下列所有算法中,都将无人机的通信半径设置为10m,最小的斥力半径设置为2m,最大排斥半径为5m,最大速度为1m/s。各个算法可以表示如下:
(1)SPB:群无人机行人行为算法,惯性系数w等于0.85,等于0.4,最大邻居数量等于4,最大碰撞系数等于0.7,等于0.55;
(2)PSO:粒子群优化算法,惯性系数w等于0.9,认知因子等于1,社会因子等于1;
(3)LFS:莱维飞行α等于1.5,b等于1.002;
(4)EPSO:无人机粒子群优化算法,惯性系数w等于0.95,认知因子等于1,社会因子等于1;
(6)GSO:人工萤火虫算法,提升因子r等于0.6,最大群组数量等于5,β等于0.08。
2 行人行为算法
在地铁站内,不存在外部的指令,但行人之间仍然能够按照某种规则形成一定的结构和功能,进而保持地铁站的高速运行。受启发于这种现象,发现地铁站中的行人和执行搜索任务的群体无人机有着许多相似之处。所以本文提出了以SPB算法来描述行人行为这种自组织行为,并且把算法应用于搜索动态目标场景。
2.1 SPB算法搜索过程
SPB算法的速度和位置迭代方程如下:

无人机机的数量设定为18,4个动态目标初始位置分别是P1(90,80),P2(20,15),P3(85,20),P4(25,90),并且四个动态目标均沿着不同方向做直线运动。如下图所示,其中目标轨迹由粗线表示,无人机由不同五角星代表,不同五角星身后对应的线条线为不同无人机的轨迹。图1给出了发现四个动态目标源的轨迹。
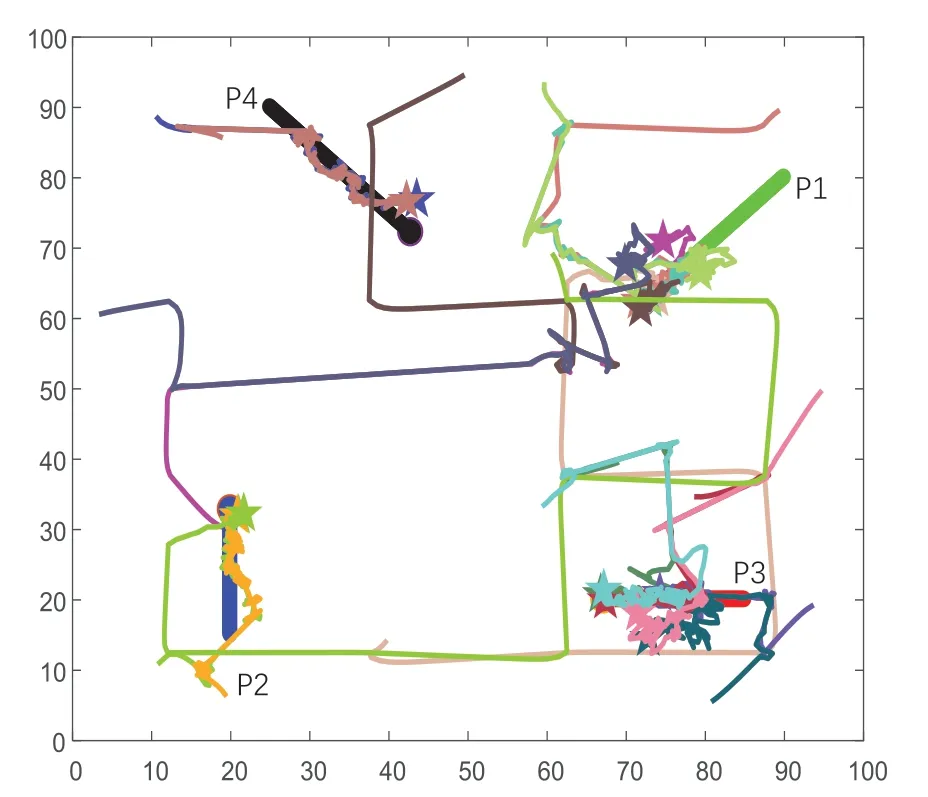
图1 18个无人机搜索4个动态目标
3 对比实验分析
本文通过碰撞率和发现目标个数等指标来与PSO、LFS、EPSO、GSO、FA算法进行比较。在实验场景为100m×100m的环境,4个动态目标,20架无人机,最大迭代次数为200的场景下,每个算法都进行200次实验,取平均结果。实验结果如图2所示,在平均碰撞率这一性能指标下和其他算法差距较小,但SPB算法的性能明显高于上述几个算法。在相同时间下,根据平均发现目标数量指标可以看出,SPB算法的目标发现个数远高于其他算法。

图2 随机无人机初始位置,200次实验性能比较
综合以上数据可以看出,在同一实验条件下,本文所提出的行人行为算法收敛速度更快,精度更高,可以发现更多目标的同时保持较低的碰撞率,充分体现了行人行为算法在动态目标搜索问题上的优势。
4 结束语
目前,市面上主要是针对静态目标进行群体无人机协同搜索方法的研究。如:覆盖搜索法、贪婪搜索法、动态规划法等;但在实际环境中,大多数目标一般都处于运动状态。所以本文提出了行人行为算法,能够在未知情况下对动态目标进行协同搜索。仿真实验结果表明,SPB算法表现出更强的稳定性,在发现更多目标的同时保持较低的碰撞率。
猜你喜欢
卫星应用(2022年7期)2022-09-05 02:36:02
卫星应用(2022年3期)2022-05-23 13:44:30
卫星应用(2022年1期)2022-03-09 06:22:20
意林(2021年5期)2021-04-18 12:21:17
环球慈善(2019年6期)2019-09-25 09:06:24
扬子江(2019年1期)2019-03-08 02:52:34
中学生数理化·七年级数学人教版(2018年11期)2019-01-31 02:39:26
娃娃乐园·综合智能(2018年23期)2018-12-26 09:10:20
娃娃乐园·综合智能(2018年3期)2018-03-22 06:13:46
小天使·一年级语数英综合(2017年6期)2017-06-07 23:51:16