TACS系统的全自动洗车方案研究
2021-05-16 17:25刘磊
现代信息科技 2021年22期
关键词:轨道交通


摘 要:轨道交通信号系统中基于车车通信的列车自主运行系统TACS的系统架构和接口有别于传统CBTC系统,TACS系统的自动洗车功能接口和信息流与传统CBTC系统也存在差异。文章结合传统CBTC系统阐述TACS系统自动洗车中的控制和管理,TACS系统自动洗车过程中与洗车机、车辆的信息交互,TACS各个子系统之间的信息交互,以及信息交互过程中的检查条件。
关键词:轨道交通;车车通信系统;全自动洗车
中图分类号:U284.48 文献标识码:A文章编号:2096-4706(2021)22-0114-04
Abstract: The system architecture and interface of the Train Autonomous Control System (TACS) based on vehicle-to-vehicle communication in the rail transit signal system are different from those of the traditional CBTC system, and the automatic vehicle washing function interface and information flow of the TACS system are also different from those of the traditional CBTC system. This paper combines the traditional CBTC system to explain the control and management of the automatic vehicle washing of the TACS system, the information interact between the TACS system and the vehicle washer and the vehicle during the automatic vehicle washing process, the information interaction between the various subsystems of the TACS, and the inspection conditions during the information interaction process.
Keywords: rail transit; vehicle-to-vehicle communication system; fully automatic vehicle washing
0 引 言
发改委发布的《产业结构调整指导目录(2019年本)》中将基于车车通信的列车自主运行系统(TACS)列为鼓励类项目,为车车通信技术在列车全自动运行系统中的发展和应用提供了政策指导。在传统城市轨道交通全自动运行控制系统(CBTC)功能需求的基础上,TACS系统的系统架构做了一些创新与优化,提升了系统性能和系统安全性,具有结构简单、成本低廉、工程较易实施、智能化程度高等特点。
近些年,随着社会的发展和科技的进步,CBTC全自动运行系统中的自动洗车控制功能设计日趋成熟,其中包括全自动洗车流程控制、各个洗车步骤中命令下达和信息发送的检查条件;全自动洗车过程中列车自动监督子系统(ATS)、区域控制器(ZC)、联锁(CI)、车载控制器(CC)、洗车机、车辆之间的信息交互;根据全自动洗车功能相关设备统计的列车运行里程数触发洗车任务,实现列车全自动主动洗车;洗车过程中聯锁系统对进入和退出洗车线的进路、信号机和道岔的控制;洗车过程中车载控制器对列车运行速度的防护;洗车过程中,根据电子地图在洗车请求停车点、洗车停车点和升降弓停车点控制列车停车等。本文基于TACS系统架构对全自动洗车过程中各个子系统间的信息交互进行探讨。
1 TACS系统自动洗车流程
当TACS系统在全自动无人驾驶模式下运行中需要进行洗车作业时,ATS将自动分配进入洗车区域的任务,车载控制器(CC)收到任务后自主申请通往洗车库的相关资源。轨旁资源管理器(WRC)从CC接收到进入洗车库的资源申请后,为列车分配进入洗车库的径路资源,并将资源可用授权发给CC。
进入和离开洗车区域的线路平面示意图如图1所示,WRC接收到CC的进入洗车区域的资源申请后,向OC发送道岔控制和信号机显示命令,OC控制道岔P6和P2移动到定位并锁闭在定位,控制信号机S6开放直向进路显示。列车离开洗车区域前由CC向WRC申请离开折返轨的资源。WRC向OC发送道岔控制和信号机显示命令,OC控制道岔P2移动到反位并锁闭在反位,控制信号机X2开放侧向进路显示。当道岔位置和锁闭状态以及信号机显示满足条件后,WRC将资源授权发送给CC。
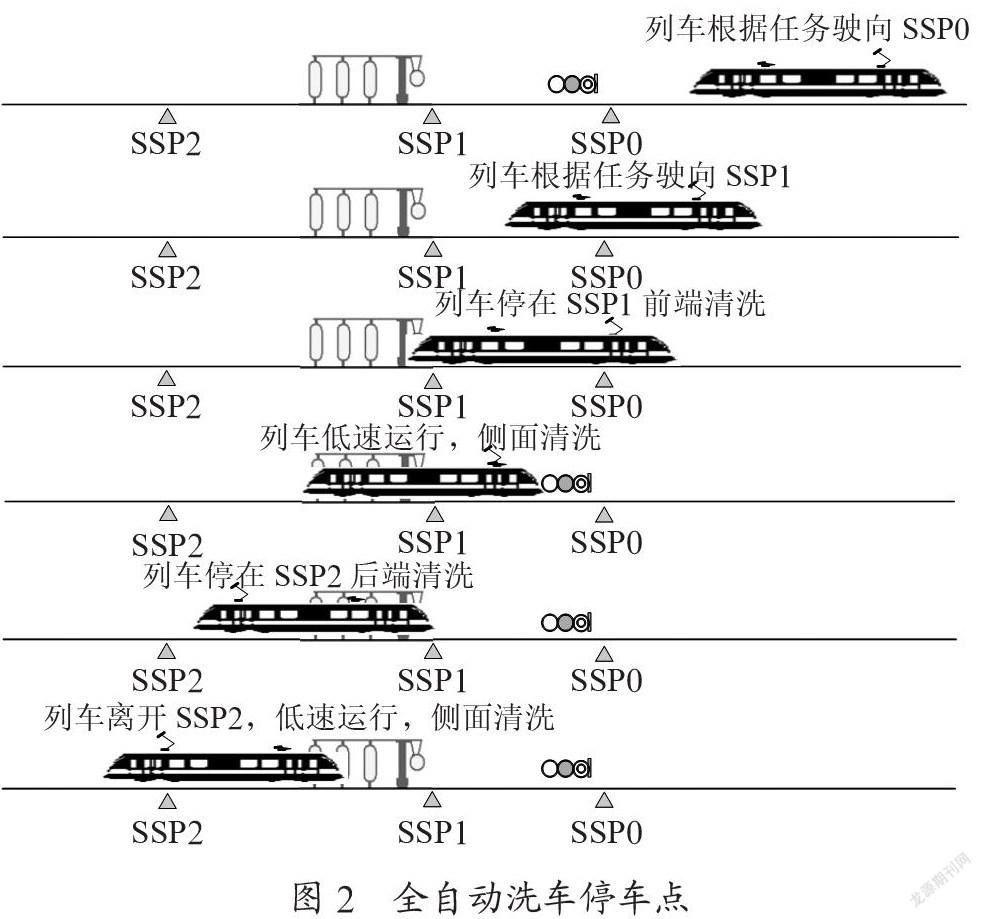
在列车进入洗车区域的过程中,CC收到资源授权后,检查前方是否有冲突列车占用,根据任务命令控制列车的进入,并在待洗车停车点SSP0停车,如图2所示。
列车在待洗车停车点停稳后,ATS通过WRC向洗车机发送“洗车请求”信息。洗车机系统在检测到列车进入洗车区域后,开始对洗车机进行预湿以准备洗车,并向TACS系统发送“洗车就绪”信息。WRC采集到洗车机的“洗车就绪”“允许通过”和“洗车故障”后将这些信息发送给ATS,ATS在收到洗车机已经准备就绪的信息,并且“允许通过”信息为允许,“洗车故障”信息为洗车机无故障后向CC下达洗车任务并设置洗车工况指令。CC根据工况设置命令控制车辆设置洗车工况,进入洗车区域的车辆设置洗车工况模式后,CC向ATS发送当前工况为洗车工况,然后根据洗车任务控制待洗列车运行到前端洗车停车点SSP1停车。
洗车机检测到列车处于前端清洗范围内后,向TACS系统发送“允许通过”信息为禁止状态。TACS系统在收到禁止通过且判断列车在前端洗车停车点停准后,向洗车机发送前端洗车请求命令。洗车机在收到前端洗车请求命令且检查洗车机工作正常后,开始清洗列车前端。在整个前端清洗过程中,车载系统不允许列车移动。
在列车前端清洗完成后,洗车机端刷机构回到原始位,并向TACS系统发送“允许通过”信息为允许状态。接收到允许通过信息后,ATS将洗车任务目标位置更新为后端洗停车点位置,CC控制列车根据新的运行任务以3 km/h~ 5km/h的速度运行,进行列车侧面清洗。CC控制列车运行到后端洗车停车点SSP2并停稳,以清洗列车尾部。
在洗车机检测到列车处于后端清洗范围内后,向TACS系统发送“允许通过”信息为禁止状态。TACS系统接收到禁止通过信息且判断列车在后端洗车停车点停准后,向洗车机发送后端洗车请求。洗车机收到后端洗车请求且检查洗车机工作正常后,开始清洗列车后端。在整个后端清洗过程中,车载系统不允许列车移动。
在列车后端清洗完成后,洗车机端刷机构回到后端原始位,洗车机向TACS系统发送“允许通过”信息为允许状态。收到允许通过信息后,ATS更新到下一个停车点的任务,列车根据新的停车点任务以3 km/h~5 km/h的速度运行,继续清洗列车侧面。
列车完全驶出洗车库后,洗车作业结束,洗车机向TACS系统发送“洗车就绪”禁止状态和“允许通过”禁止状态。TACS系统收到这些信息后命令车辆将列车工况从洗车工况转为车辆基地工况。
2 TACS系统自动洗车接口
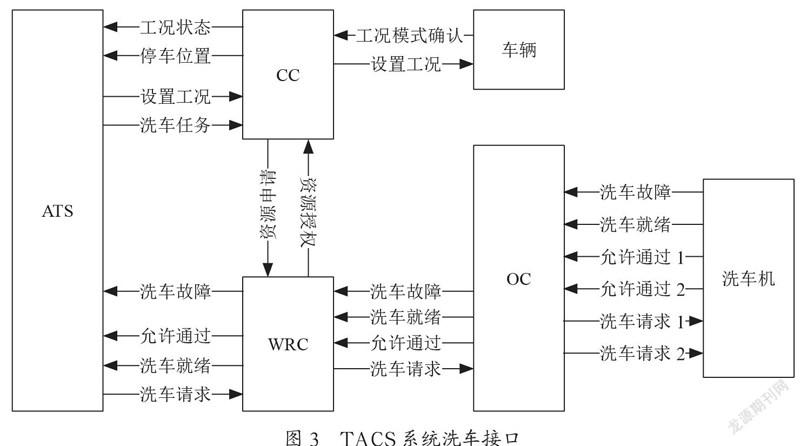
TACS系统通过目标控制器(OC)與洗车机进行硬线接口,交互TACS系统的“洗车请求”洗车机的“允许通过”“洗车故障”状态和准备洗车的“洗车就绪”信息。WRC与OC之间接口,交互“洗车请求”“允许通过”“洗车故障”和“洗车就绪”信息。ATS与WRC之间进行接口,交互“洗车请求”“允许通过”“洗车故障”和“洗车就绪”信息。ATS与CC接口,交互“洗车任务”“工况设置”“工况状态”和“停车位置”信息。CC与WRC接口,交互进出洗车库的“资源申请”和“资源授权”信息。CC与车辆接口,交互洗车工况和车辆基地工况的设置和状态信息,如图3所示。
ATS将“洗车请求”状态和接收到的来自洗车机的“允许通过”“洗车故障”状态和“洗车就绪”信息显示在ATS车辆段现地控制工作站上,供车辆段调度员查看。工作站显示布置示意图如图4所示,“洗车请求”灯显示黄色时,表示ATS向洗车机发送洗车请求,显示灰色时,表示ATS没有向洗车机发送洗车请求;“洗车就绪”灯显示绿色时,表示洗车机准备就绪,允许洗车,显示灰色时表示洗车机未准备就绪,禁止洗车;“允许通过”灯显示绿色时表示洗车机允许列车移动,显示灰色时表示洗车机禁止列车移动;“洗车故障”灯显示红色时表示洗车机故障,禁止洗车操作,显示灰色时表示洗车机工作正常,允许洗车。
3 传统CBTC系统自动洗车方案
对于传统CBTC系统,洗车机接口信息可由ATS通过联锁系统与洗车机进行洗车请求和状态信息的交互,也可由车载信号系统通过联锁系统与洗车机进行交互。
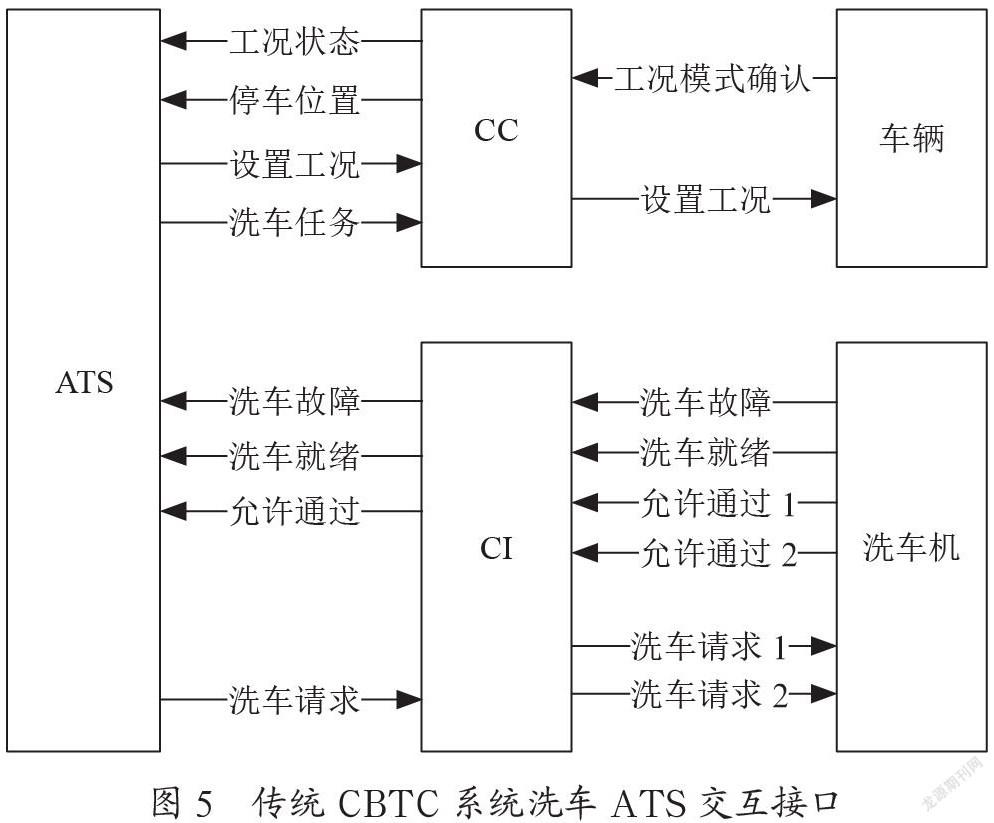
洗车机接口信息由ATS通过联锁系统与洗车机对洗车任务和状态信息进行交互的全自动洗车方案的接口信息流框图如图5所示。在该方案中,洗车任务的管理主要由ATS完成,当处于全自动驾驶模式的列车需要洗车时,ATS触发到达待洗车停车点的进路,车载控制器根据运行任务控制列车运行至待洗车停车点。列车在待洗车停车点停稳后,ATS向车载控制器发送进入“洗车工况”信息,车载控制器控制车辆进入洗车工况,同时ATS向联锁发送“洗车请求”信息。联锁与洗车机接口,将“洗车请求”发送给洗车机。洗车机检查其自身处于自动洗车模式,并将“洗车就绪”“允许通过”和“洗车故障”的状态信息发送给联锁,联锁经过处理后将这些信息发送给ATS。
ATS收到洗车就绪、允许通过且洗车机没有故障的信息后自动办理进入洗车区域的进路,联锁收到ATS的进路办理命令后建立并锁闭相应的进路,同时ATS向车载控制器下达列车进入洗车区的指令。在洗车库门打开的情况下,进入洗车库的防护信号机开放允许信号后,车载控制器获得移动授权并控制列车在前端洗车停车点停车。列车在前端洗车停车点停稳后,ATS通过联锁向洗车机发送“前端洗车请求”,洗车机可通过光传感器检测列车车头位置正确,将前端洗车的“允许通过”信息设置为限制态,并开始清洗列车前端。列车车头清洗完成后,洗车机将前端洗车的“允许通过”信息设置为允许态,ATS判断列车前端洗车的“允许通过”信息从限制态变为允许态后,向列车发送去往后端洗车停车点的任务。车载控制器根据ATS的指令,控制列车以低于洗车区域限速的速度运行到后端洗车停车点停车。在列车从前端洗车停车点向后端洗车停车点运行的过程中,洗车机可对列车进行侧面清洗。
列车在后端洗车停车点停稳后,ATS通过联锁向洗车机发送“后端洗车请求”,洗车机检测列车车尾位置正确,将后端洗车的“允许通过”信息设置为限制态,并开始清洗列车后端。列车车尾清洗完成后,洗车机将后端洗车的“允许通过”信息设置为允许态,ATS判断列车后端洗车的“允许通过”信息从限制态变为允许态后,向列车发送到达折返停车点或洗车结束停车点的任务。车载控制器根据ATS的指令,控制列车以低于洗车区域限速的速度运行到下一停车点停车。列车在下一停车点停稳后,ATS向车载控制器发送退出“洗车工况”指令,车载控制器控制车辆退出洗车工况,结束洗车。
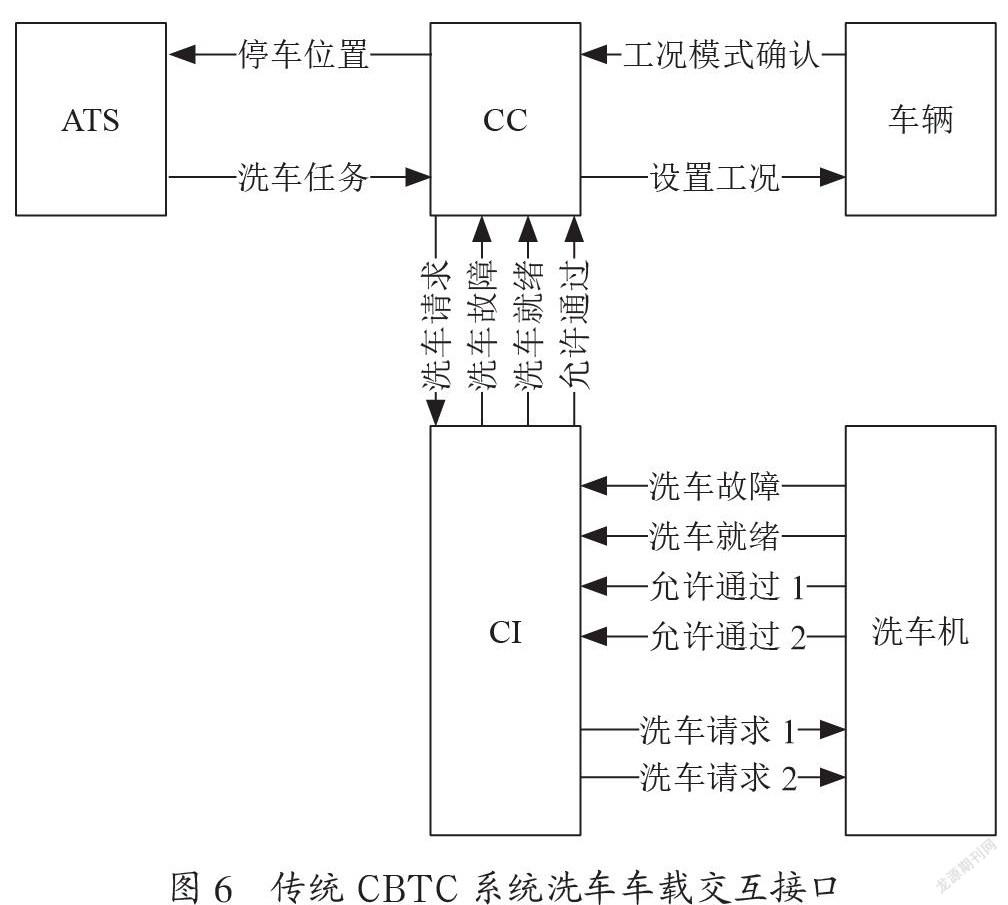
洗车机接口信息由车载控制器通过联锁系统与洗车机对洗车请求和状态信息进行交互的全自动洗车方案的接口信息流框图如图6所示。在该方案中洗车任务的管理主要由车载控制器完成,当处于全自动驾驶模式的列车需要洗车时,车载控制器根据运行任务控制列车运行至待洗车停车点后向联锁发送“洗车请求”信息。联锁与洗车机接口,将“洗车请求”发送给洗车机。洗车机检查其自身处于自动洗车模式,并将“洗车就绪”“允许通过”和“洗车故障”的状态信息发送给联锁,联锁经过处理后将这些信息发送给车载控制器。
进入洗车库的防护信号机开放允许信号后,车载控制器获得移动授权并判断洗车就绪、允许通过且洗车机没有故障后控制列车运行到前端洗车停车点停车。列车在前端洗车停车点停稳后,车载控制器通过联锁向洗车机发送“前端洗车请求”,洗车机检测列车车头位置正确,将前端洗车的“允许通过”信息设置为限制态,并开始清洗列车前端。列车车头清洗完成后,洗车机将前端洗车的“允许通过”信息设置为允许态,车载控制器判断列车前端洗车的“允许通过”信息从限制态变为允许态后,控制列车以低于洗车区域限速的速度运行到后端洗车停车点停车。后端洗的过程也是由车载控制器处理与洗车机的接口信息,进行洗车过程的管理。
4 结 论
在由ATS管理洗車任务的传统CBTC方案中,洗车过程由ATS、联锁和车载系统共同管理和执行,控制车辆运行,与洗车机进行信息交互。在TACS系统中,洗车过程由ATS、车载系统、资源管理器和目标控制器进行管理和执行,通过目标控制器与洗车机接口进行信息交互。
从信号系统架构的角度来看,传统CBTC系统中车辆段联锁与车载不进行接口,在基于ATS对全自动洗车进行管理的方案中联锁与车载之间无需增加接口设备,在通过车载系统与联锁交互洗车请求和洗车机状态信息的方案中则需要增加接口设备。TACS系统中车载与资源管理器之间有资源交互接口,该接口也可用于全自动洗车的信息交互,无论是否采用ATS管理洗车均无需增加接口设备,对洗车方案具有更高的适应性。
参考文献:
[1] 秦小虎,孙晓光.城市轨道交通全自动洗车方案研究 [J].铁路通信信号工程技术,2021,18(4):77-82.
[2]罗斌龙,赵晓峰,孙思南,等.全自动运行信号系统与洗车机接口分析研究 [J].现代城市轨道交通,2020(4):28-32.
[3] 寇若岚.全自动运行信号系统与洗车机的接口方案研究 [J].铁路通信信号工程技术,2018,15(10):68-72.
[4] 张强,张扬,刘波,等.城市轨道交通全自动驾驶列检库、洗车库的车库门安全防护方案 [J].城市轨道交通研究,2018,21(1):132-136.
[5] 夏季.全自动驾驶模式下地铁车辆段洗车机技术接口分析 [J].现代城市轨道交通,2018(5):21-24.
[6] 杜时勇,陈华银.地铁全自动洗车方案研究 [J].铁道通信信号,2017,53(8):62-65.
作者简介:刘磊(1980—),女,汉族,黑龙江庆安人,中级工程师,本科,研究方向:轨道交通信号系统需求分析和系统设计。
猜你喜欢
中国应急管理科学(2022年2期)2022-05-23
客联(2021年3期)2021-09-10
电子乐园·中旬刊(2021年6期)2021-05-16
科学与财富(2021年33期)2021-05-10
科学与财富(2021年33期)2021-05-10
科学家(2021年24期)2021-04-25
科学家(2021年24期)2021-04-25
科学与生活(2021年15期)2021-01-14
西部交通科技(2021年9期)2021-01-11
智富时代(2018年5期)2018-07-18