
引入相对控制的近景摄影轨道几何状态测量方法与实验
2021-05-13 07:47赵晶晶卢冬冬彭卫平刘丽瑶杨莹辉
铁道学报 2021年4期
陈 强,赵晶晶,卢冬冬,彭卫平,刘丽瑶,杨莹辉
(西南交通大学 测绘遥感信息系,四川 成都 610031)
铁路轨道直接承载由车轮传来的静动荷载,引导机车车辆快速运行[1]。保持运营轨道良好的几何状态是列车安全运营的重要前提。高速铁路行车速度快,对于轨道平顺性的要求高于普速铁路[2]。而列车长期的静动荷载、轨道周围温度或湿度的变化、地基下沉等因素都可能导致轨道几何形态发生变化,给列车的高速运行带来安全隐患。因此,在高速铁路建设阶段的铺轨精调和后期运营维护过程中,均需及时对轨道的几何状态进行检测,使其达到安全运营的技术标准[3-6]。
目前我国高速铁路轨道平顺性静态检测主要采用轨检小车系统,轨检小车一般内置倾斜传感器和轨距传感器,配合智能型全站仪进行检测。这种测量方式在我国高速铁路建设初期得以广泛应用。然而,该方法是基于逐点式的离散测量,劳动强度大,检测效率有待进一步提高和改进[7]。
将近景摄影测量与轨道平顺性检测结合的车载摄影轨道检测方法是一种快速发展的新方式。近景摄影测量是一种无接触式的测量方法,它可以瞬间获取轨道的大量影像数据,不触及轨道,信息容量大且易于存储[8]。因此,将近景摄影测量方法应用于轨道检测有望显著提高轨道测量的效率,它只需要通过少量外业影像获取工作,就可以获得轨面边缘点三维坐标,进而完成轨道平顺性检测。
在实际轨道检测中,高速铁路轨道控制网通常呈带状,检测区域跨度很大,容易出现误差积累;另一方面,以往近景摄影轨道检测依赖于高精度控制点,但实际应用中高精度控制点的分布往往较为稀疏。此外,钢轨间灰度变化不显著,纹理信息少,造成了轨面同名点提取困难,采集的轨道影像同名点往往分布不均匀。由于上述条件的限制,在实际应用中车载近景摄影轨道检测仍存在相关问题,表现为摄影中心高程或左右相机摄影基线长度呈现解算波动,这种与实际情况不符的异常波动严重影响外方位元素的计算,进而影响高速铁路轨道检测的精度。
上述现象主要是由于约束控制条件不足而引起的,因此增加控制条件而不增加外业工作量是一种较好的解决方案。本文提出引入相对控制的近景摄影轨道检测方法,在车载摄影轨道检测基础上引入相对控制条件,利用摄影测量数据处理中未知点间的某种已知几何关系作为约束控制[9-10],在近景摄影测量中可较为便捷地选用相对控制条件。本文引入轨道坡度平滑约束和左右相机摄影基线长度约束条件,期望通过引入轨道坡度平滑约束条件以抑制摄影中心高程的突变,引入摄影基线长度约束条件抑制摄影基线长度的波动。此外,引入相对控制条件可显著提高在地面控制点稀疏分布条件下的轨道区域网光束法平差精度。
1 引入相对控制的近景摄影轨道检测方法
1.1 车载近景摄影轨道测量
引入相对控制的近景摄影轨道检测方法是利用车载摄影轨道测量平台获取轨道影像后,在平差过程中引入相对控制条件。车载近景摄影轨道测量是指通过车载近景摄影装置同时采集左右轨道连续影像,经过影像匹配、轨道边缘提取等影像处理工作,进行区域网整体光束法平差,进而计算轨道平顺性参数的方法,具有操作简单、采集效率高、影像分辨率高、测量精度高等优点[11]。其摄影主光轴近似垂直于轨道面,摄影高度约为1.4 m,左右相机间隔约1.45 m,沿钢轨方向成像间隔约0.6 m,见图1。
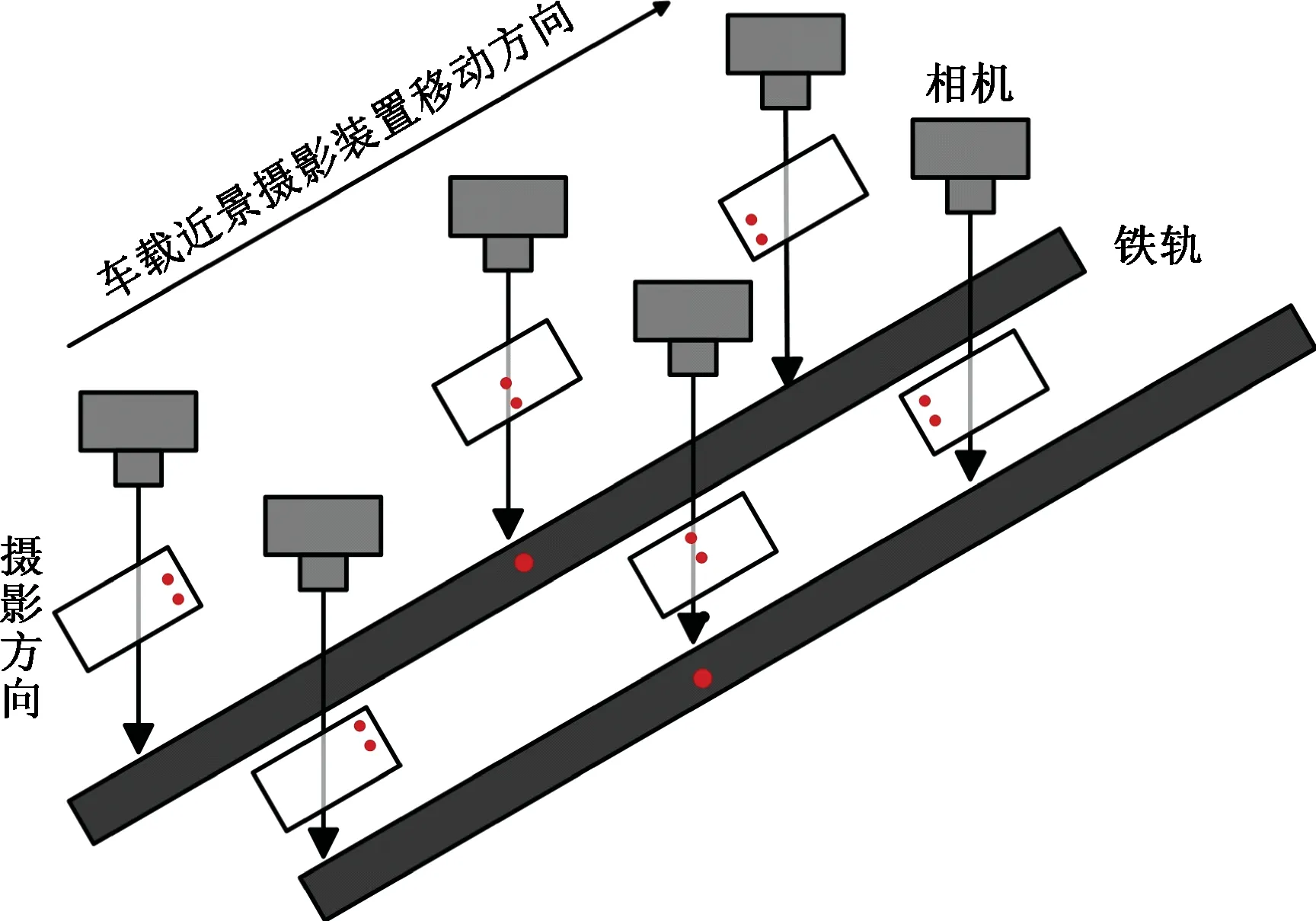
图1 车载近景摄影轨道测量示意
1.2 车载近景摄影测量装置
车载近景摄影测量装置如图2所示,整体采用稳定的三角形设计。相机承载平台可固定两台高分辨率数码相机,影像采集前可沿垂轨方向调整相机位置,使其位于钢轨正上方;计算机承载架用于放置便携式工业计算机,工业计算机通过数据线与两台相机连接,控制相机曝光时间、设计参数并存储轨道影像;计算机承载架上装有扶手,推动装置在轨道上平稳移动检测[12]。
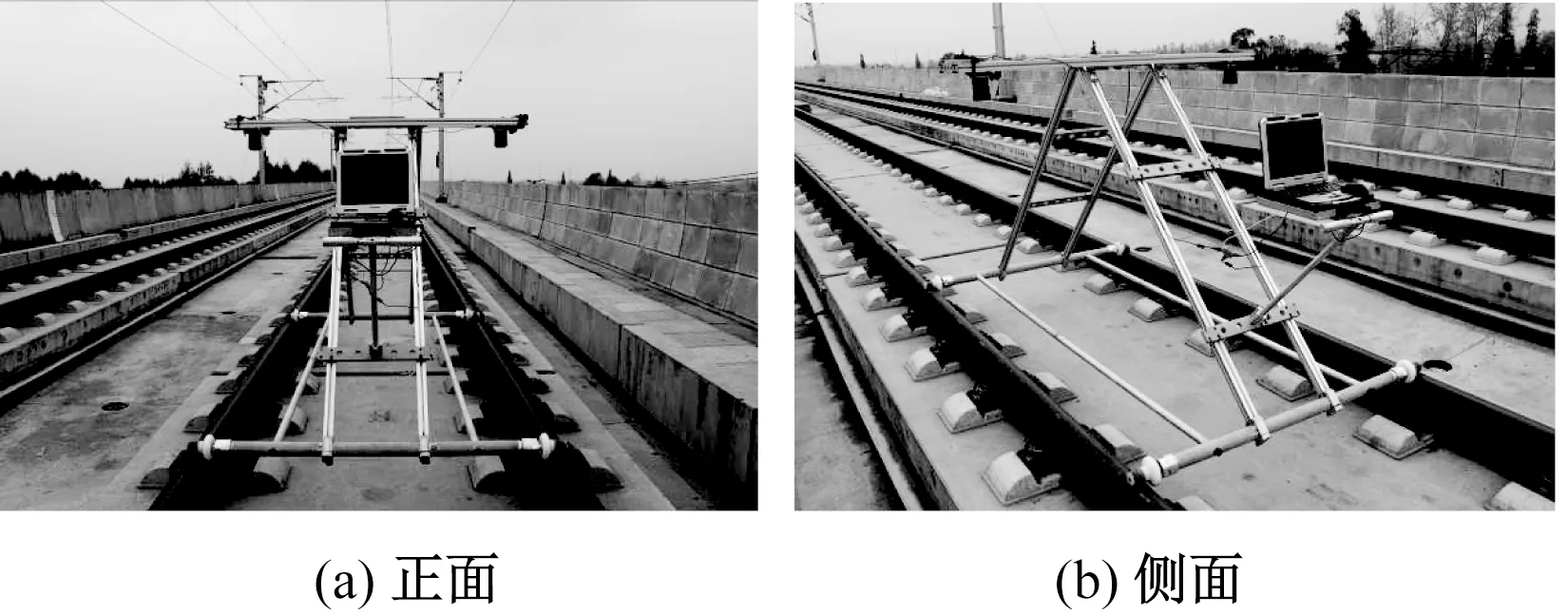
图2 车载近景摄影测量轨道检测装置
在成像过程中,车载近景摄影测量装置结构稳定,且高速铁路钢轨具有高强度和高韧性,故沿轨向摄影中心高程在短距离内平滑变化,这是引入的第一个相对控制条件;而对左右轨成像的两台相机均固定在车载近景摄影测量装置上,整个影像采集过程不产生相对位移,即左右两台相机摄影基线长度固定,作为引入的第二个相对控制条件。
1.3 轨道坡度平滑约束条件
高速铁路对钢轨的性能要求很高,钢轨的质量、材质、平直程度都有严格限制[13]。短距离内钢轨轨面高程变化往往比较平滑。而进行采集影像时,数码相机固定在车载近景摄影装置上,该装置结构稳定。因此,沿轨向摄影中心高程变化也应当与轨道轨面保持一致,即短距离内保持平缓变化。而在近景影像范围内(约2.4 m),摄影中心高程可近似认为是线性变化。
如图3所示,图3中Si代表摄影中心,短距离内摄影中心高程变化可近似为图3(a)正坡和图3(b)负坡两种情况,它们都满足轨道坡度平滑约束条件,即在一定的长度范围内(如一个轨枕的测量步距),摄影中心的高程变化相同。实验显示适当的增加步距,有利于提高控制效果,但步距过大会引入误差,控制效果反而减弱。选择步距适中的五张沿轨向影像,则其摄影中心高程应满足条件方程为
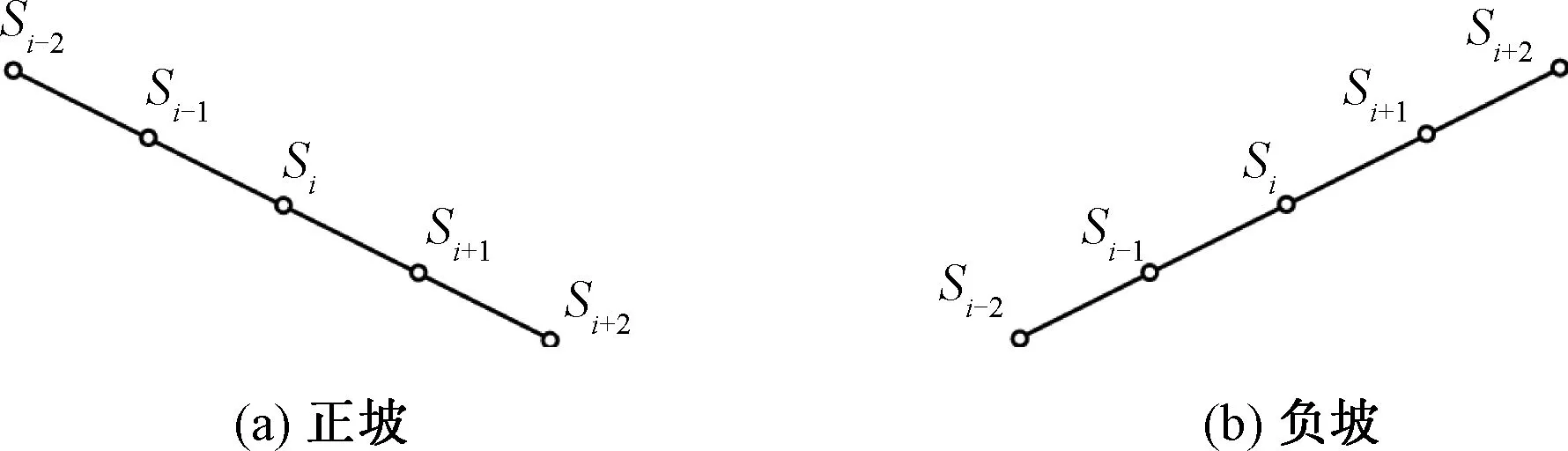
图3 轨道坡度平滑条件
(1)
式中:d是相邻摄站之间的距离(约0.6 m)。经过适当变换,消除摄站间距离参数d,则可得
2ZSi-ZSi-2-ZSi+2=0
(2)
1.4 摄影基线长度约束条件
在车载近景摄影设备采集轨道影像的过程中,两台数码相机通过承载装置与移动平台相连接,在轨道检测过程中相机不拆卸,因此,成像过程中两台相机之间的空间距离保持不变,即左右轨影像的摄影基线长度保持固定。
如图4所示,以S1为坐标原点,沿轨向(即S1S2方向)为Y轴,垂轨向(即S1S3方向)为X轴,高程方向为Z轴,建立右手系。设左影像摄影中心SL(XSL,YSL,ZSL)和右影像摄影中心SR(XSR,YSR,ZSR)之间的距离为摄影基线长度L,则左右影像满足如下条件方程为

图4 左右两台相机摄影基线长度约束
(XSL-XSR)2+(YSL-YSR)2+
(ZSL-ZSR)2-L2=0
(3)
实际检测过程中,对于左右轨影像的摄影基线长度可采用高精度的相机检校区控制数据进行解算获得。
1.5 引入相对控制的近景摄影轨道测量计算模型
在常规光束法轨道区域网平差的基础上引入上述两个相对控制条件,得到引入相对控制的车载摄影轨道平差计算模型为
(4)
式中:f为相机的主距;x、y为像点的像平面坐标;x0、y0为像主点的像平面坐标;Δx、Δy为像点的物镜畸变改正数;X、Y、Z为对应物点的地面摄影测量坐标;XS、YS、ZS为摄影中心的地面摄影测量坐标;XSL、YSL、ZSL为左影像摄影中心的地面摄影测量坐标;XSR、YSR、ZSR为右影像摄影中心的地面摄影测量坐标。
式(4)前两行是共线条件方程,后两行是引入的相对控制条件。相较于常规区域网光束法平差,该计算模型引入了两类新的约束条件,因此,该计算模型应具有更好的约束控制能力。
2 引入相对控制的车载摄影轨道检测实验
2.1 实验方案及技术流程
为了验证引入相对控制条件的有效性,并对引入相对控制的近景摄影轨道检测方法的实际精度予以评估,本文以成灌快速铁路彭州支线和成渝高速铁路简阳段进行实验。实验使用工业计算机控制两台高精度数码相机(型号:Canon EOS 5D Mark III,像素2 230万)同时对左右轨道近垂直成像。以影像外方位元素、影像内方位元素、影像畸变参数、轨道测点坐标作为未知量,根据引入相对控制的光束法平差理论和方法,进行平差解算。具体的技术流程见图5。
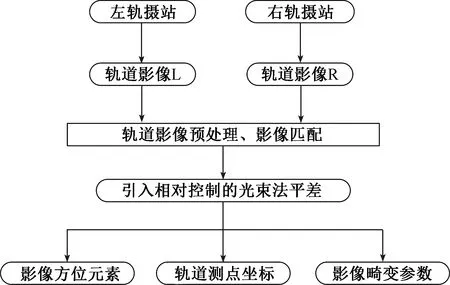
图5 轨道近景摄影测量技术流程
2.2 实验数据和数据处理
选取两个实验区段进行实验,具体情况如下。
实验区一:位于成灌快速铁路彭州支线,长约20 m,共布设10个地面点,首尾端各5个,选择其中6个点作为控制点(首端3个,尾端3个),4个点作为检核点(首端2个,尾端2个),见图6。
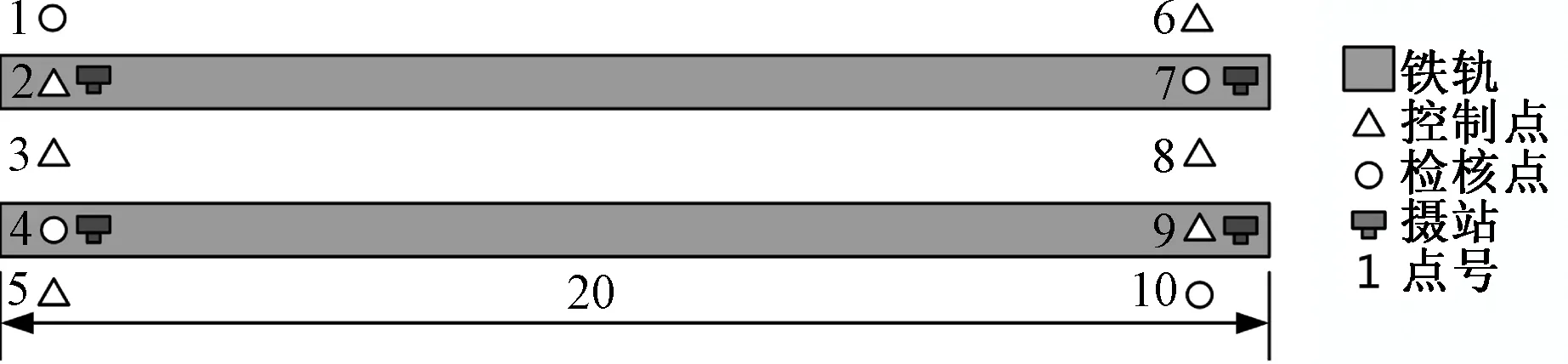
图6 实验区一分布示意(单位:m)
实验区二:位于成渝高速铁路简阳段,长约130 m,共布设20个地面点,选择10个点作为控制点(首端5个,尾端5个),10个点作为检核点(首端5个,尾端5个),见图7。
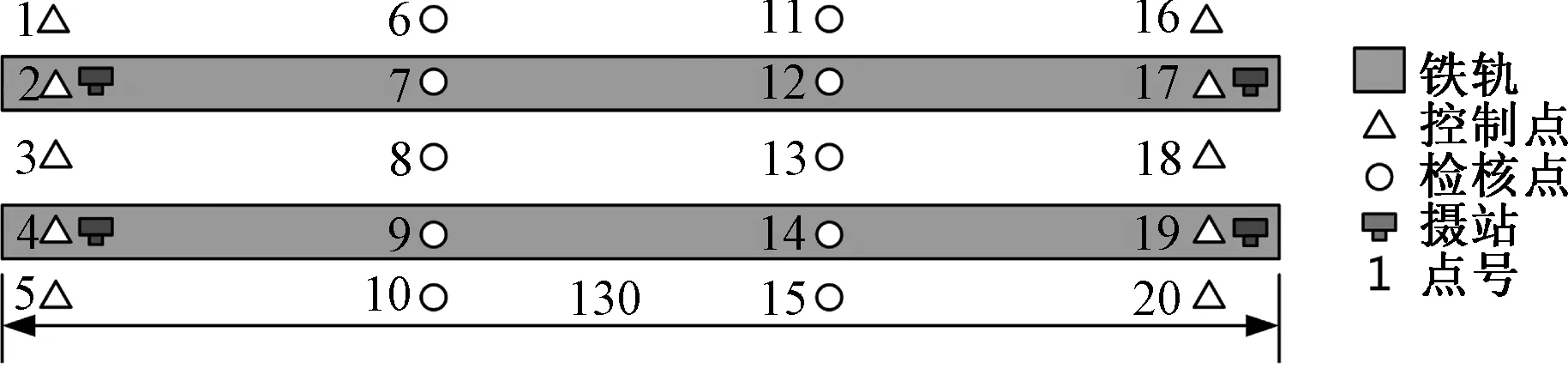
图7 实验区二分布示意(单位:m)
依据图6、图7所示的摄站位置对轨道近垂直成像,得到一系列重叠的左右轨影像对。采集到的轨道影像和布设的地面点见图8,图8(a)和图8(c)分布为采集到的左右轨影像,图8(b)为轨道影像中的地面像控点标志。像控点三维坐标采用智能型全站仪测量,见图9,使用多个CPIII控制点后方交会(黑色虚线)计算出全站仪站心的位置,然后依次在各像控标志点上安置棱镜测量出各个点的三维坐标(褐色实线)[14-15]。
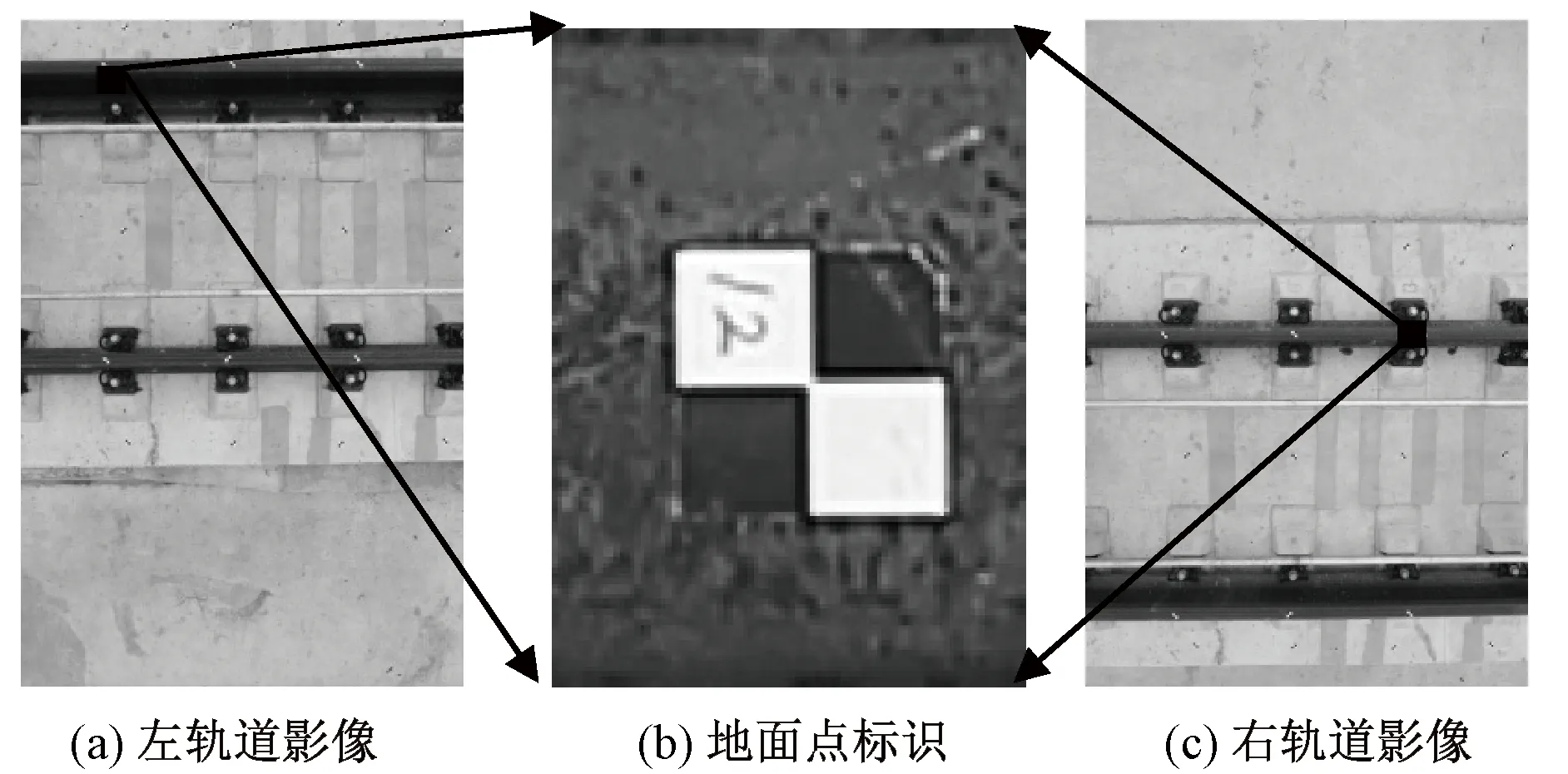
图8 实验区二 轨道影像及地面点标识
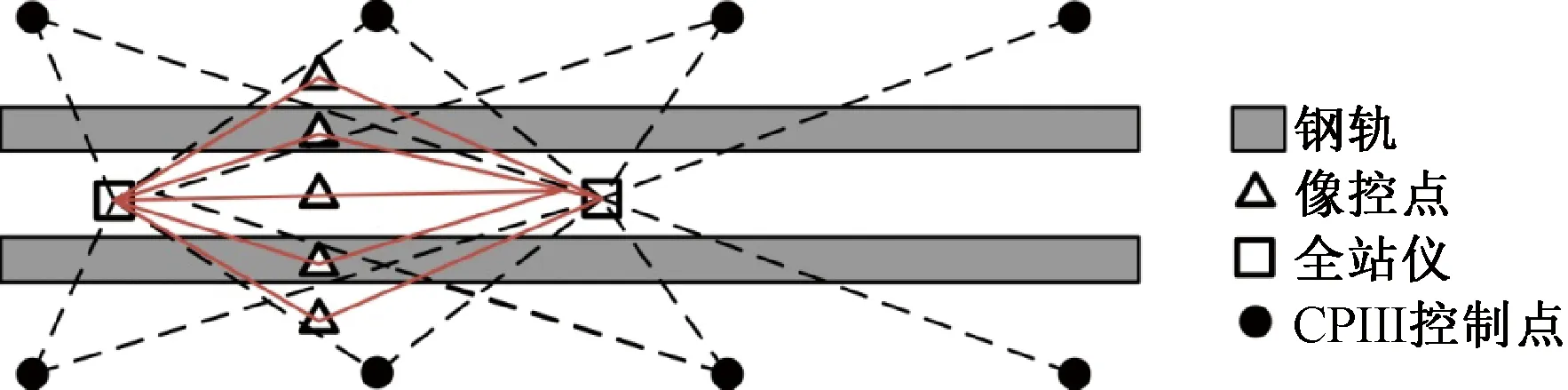
图9 像控点自由设站测量示意
2.3 实验结果与分析
2.3.1 相对控制条件下的摄影中心高程及摄影基线变化
摄影中心高程和左右相机摄影基线长度的异常波动将严重影响轨道坐标计算的精度,而本文引入相对控制正是为了增强约束条件,消减摄影中心高程和摄影基线长度的异常变化。因此,评估引入相对控制的光束法平差计算结果的波动状况,可以验证引入相对控制条件的有效性。
引入相对控制条件在两个实验区摄影中心高程和摄影基线长度的变化情况,见图10和图11。

图10 实验区一摄影中心高程及摄影基线长度变化
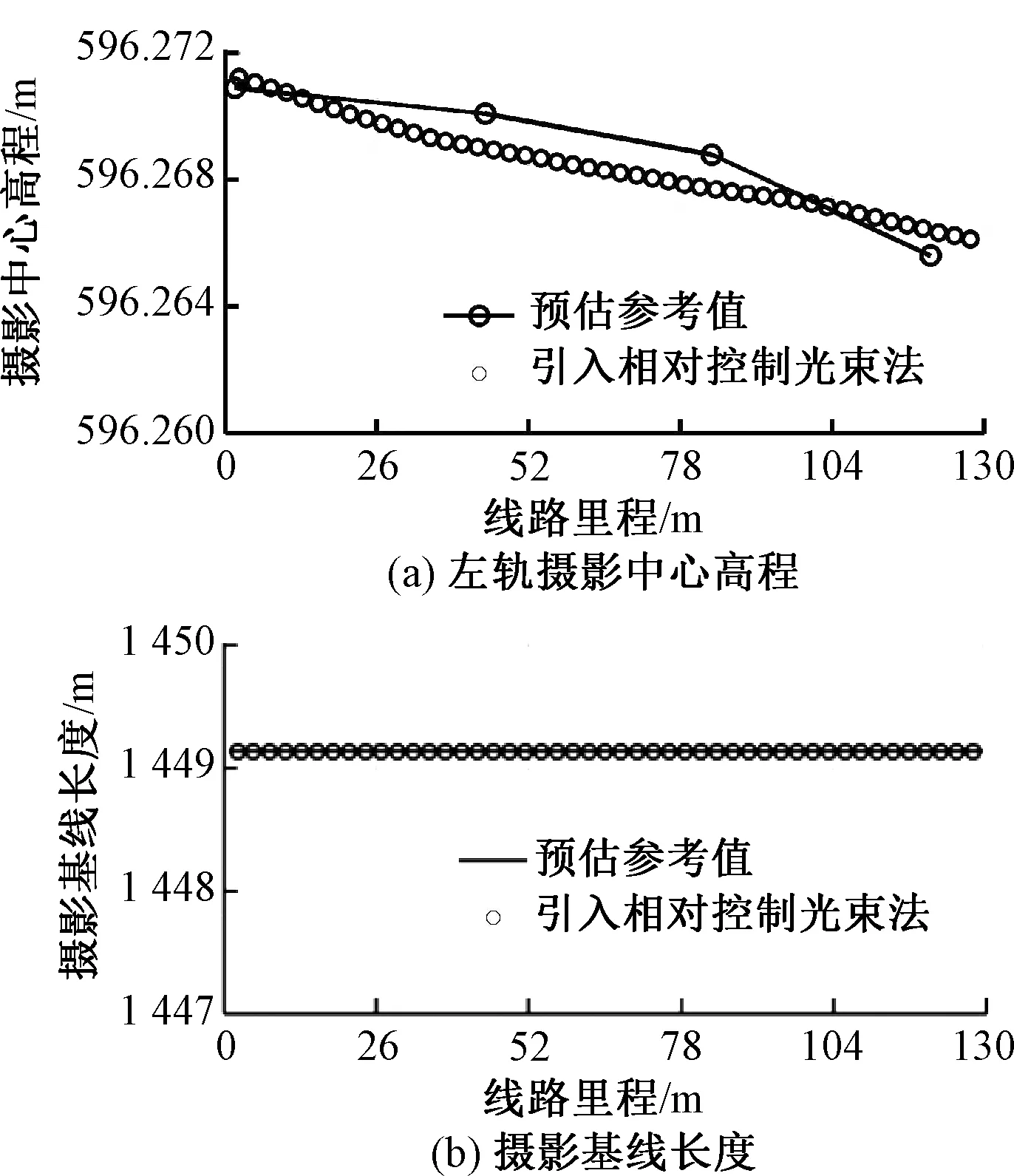
图11 实验区二摄影中心高程及摄影基线长度变化
实验区一摄影中心高程预估参考值根据轨面控制点坐标和摄影高度推算得到,摄影基线长度预估参考值通过相机检校区控制数据解算。为了更加清晰直观,对图11中坐标轴进行平移固定常数处理,对实验区二的外方位元素均匀抽稀显示。
由图10(a)和图11(a)可见,实验区一与实验区二高程变化比较平滑,基本趋势与预估参考值一致,故引入相对控制条件显著削弱了摄影中心的高程异常变化。由图10(b)和图11(b),实验区摄影基线的长度均很稳定,且与预估参考值一致,故引入相对控制条件有效抑制了摄影基线距离的变化。随实验区距离增加,外方位元素波动比较稳定,无明显增大趋势。
综合图10和图11可知,引入相对控制的光束法平差可以有效抑制摄影中心高程及摄影基线长度两种异常波动,计算结果与实际状况基本相符,具有更好的可靠性。
2.3.2 精度评定
检核点残差与控制点残差是评估整体轨道区域网平差精度的常用指标。使用高精度智能型全站仪自由设站法测量布设的地面点三维坐标,通过比较近景摄影测量平差计算出的地面点与外业测量的地面点坐标的差异,评估车载摄影测量的实际精度。设(Xp,Yp,Zp)为光束法平差计算的地面点三维坐标,(Xc,Yc,Zc)为利用全站仪获得的地面点三维坐标,均方根误差计算式为
(5)
式中:mX、mY、mZ分别为垂轨向X、沿轨向Y、高程Z方向的均方根误差;n为地面点的个数。
实验区一使用了68张影像,6个控制点,4个检核点,746个联系点,分别进行常规光束法平差和引入相对控制的光束法平差,根据式(5)计算检核点精度与控制点精度,见表1和表2。由表1和表2可知,实验区一使用两种平差方法检核点和控制点残差都很小。
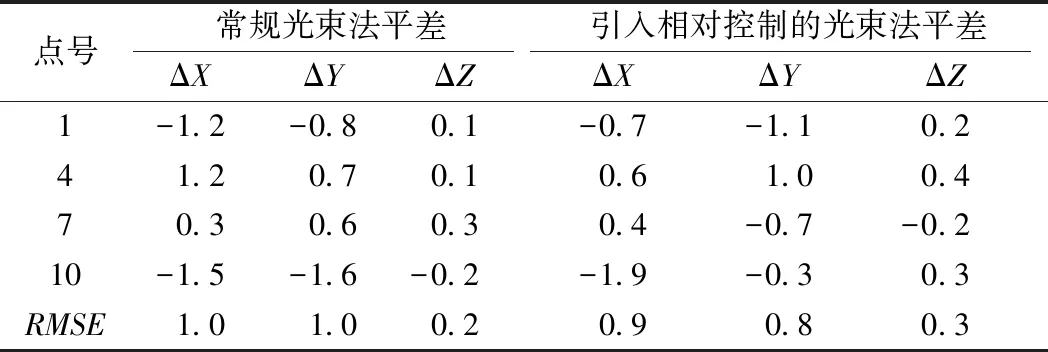
表1 实验区一检核点精度 mm
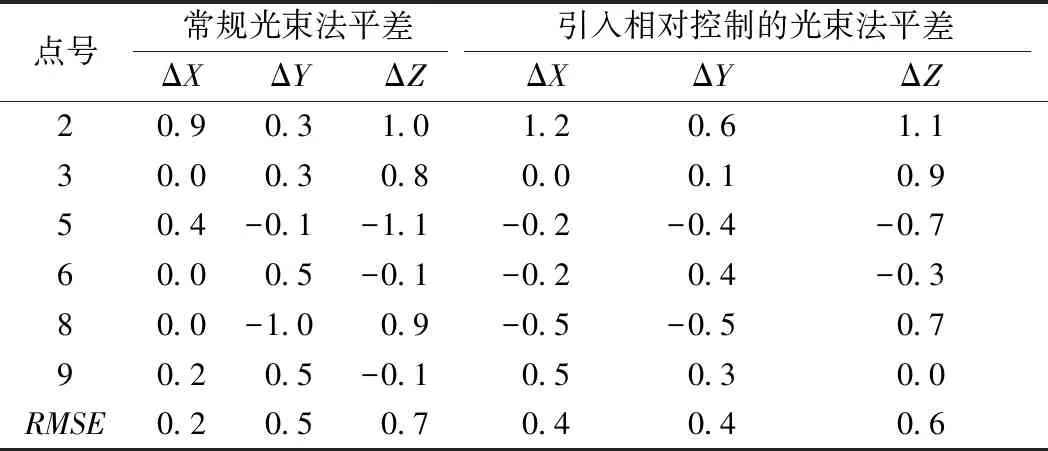
表2 实验区一控制点残差 mm
实验区二使用了382张影像,10个控制点,10个检核点,26 212个联系点,同样使用两种方法进行平差,计算检核点与控制点精度,见表3和表4。
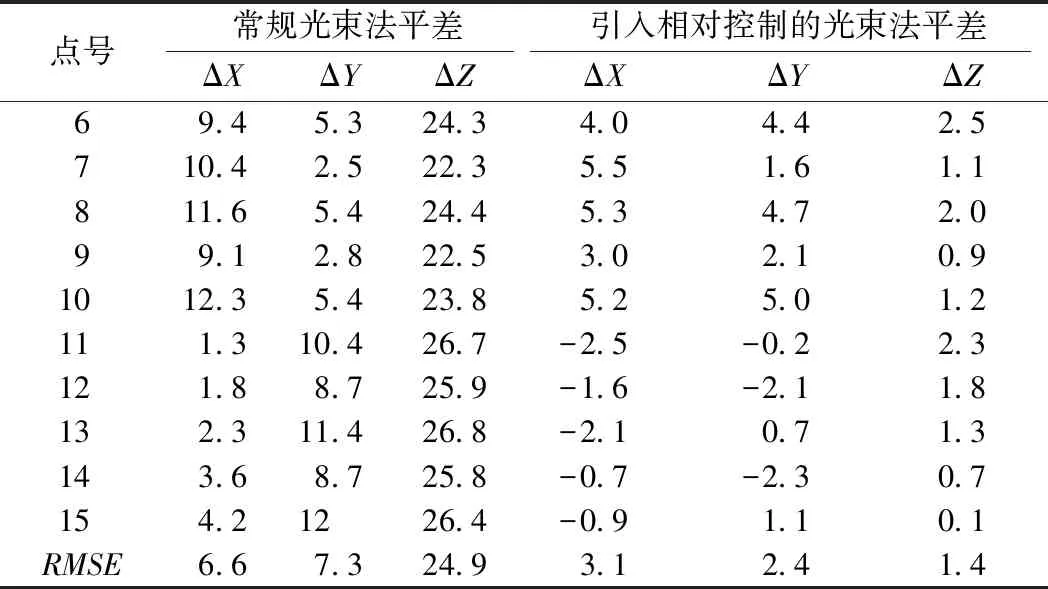
表3 实验区二检核点精度 mm
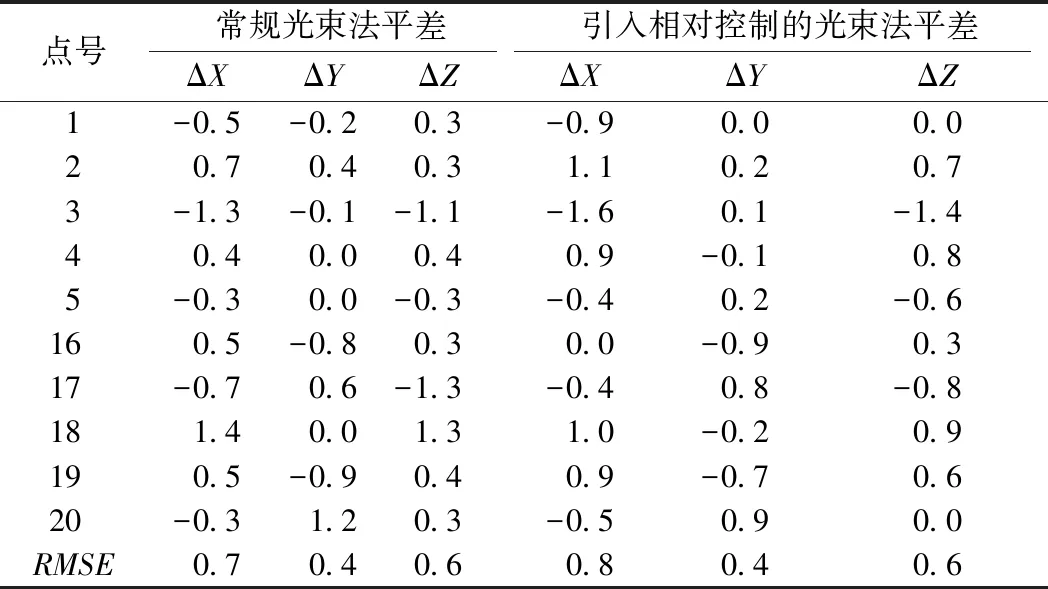
表4 实验区二控制点残差 mm
由表3可知,在实验区二中引入相对控制条件下,检核点精度显著提高。在地面控制点稀疏的情况下,即约130 m的距离只使用首尾控制点的控制条件下(见图7),常规光束法平差精度较低,尤其在高程方向残差很大;而引入相对控制条件后,沿轨、垂轨和高程方向的精度都显著改善,得到比较好的平差结果。由表4可知,在实验区中使用两种平差方法控制点残差非常接近,均小于1 mm。
结合表1、表3可知,随着实验区域长度增加,若保持仅在平差区域首尾端使用控制点,常规光束法平差精度较低;而引入相对控制的光束法平差精度得以提高且较为稳定,外方位元素变化合理。结合表2、表4可知,在实验区使用两种平差方法控制点残差无显著变化,可见引入相对控制条件没有带来显著残余误差。因此,在控制点较为稀疏、绝对控制强度不足时,引入相对控制条件可以增加约束强度显著提升平差精度,有效抑制外方位元素异常波动,这也表明本文提出的相对控制条件是合理而有效的。
3 结论
本文针对车载近景摄影轨道检测方法在实际应用中存在的参数波动问题,提出了引入相对控制的新思路,通过在成灌快速铁路彭州支线和成渝高速铁路简阳段开展实验。可以得到以下结论:
(1)引入高程坡度平滑和左右相机摄影基线长度固定两类相对控制条件可以显著改善摄影中心高程波动过大和摄影基线长度变化异常的状况,为后续的轨道边缘点提取和平顺性参数计算奠定了良好的基础。
(2)在控制点较为稀疏、绝对控制强度不足时,引入相对控制条件可以增强约束强度,显著提升光束法平差的精度。
猜你喜欢
科技管理研究(2022年18期)2022-10-29
导航定位学报(2022年4期)2022-08-16
科学与生活(2021年19期)2021-10-30
导航定位学报(2021年5期)2021-10-13
青年文学家(2021年1期)2021-03-24
数字海洋与水下攻防(2020年5期)2021-01-04
舰船电子对抗(2019年6期)2019-04-27
投资北京(2017年1期)2017-02-13
科技创新与应用(2016年9期)2016-05-14
基础教育参考(2015年5期)2015-06-01
