
基于遥感图像水体识别与检测研究综述
2021-05-08 05:58:58张铭飞高国伟胡敬芳宋钰
传感器世界 2021年3期
张铭飞 高国伟 胡敬芳 宋钰
1.北京信息科技大学 传感器北京市重点实验室,北京 100101;2.北京信息科技大学 现代测控技术教育部重点实验室,北京 100192;3.传感器联合国家重点实验室,中国科学院空天信息创新研究院,北京 100190
0 引言
由于水资源短缺等一系列问题日益严重,需要对水资源的数量和变化进行监控[1]。近年来,随着遥感技术日益成熟,因其拥有检测距离短、检测范围广等优点,所以在很多不同的领域都是一个重要的研究课题,在海岸线变化监测、环境保护、防灾减灾、水质检测等领域都备受关注[2]。如何能够快速、精确地提取遥感图像中水体的信息则成为最关键的问题,虽然对遥感图像水体识别的研究工作不是很多,但还是出现了一些有效的成果。本文通过查阅国内外的诸多研究成果,综合梳理,评判各方法的优缺点,并提出遥感图像水体识别的发展趋势及挑战[3]。
1 理论介绍
遥感图像主要由陆地资源卫星上的合成孔径雷达(synthetic aperture radar,SAR)、微波成像雷达等设备进行获取并传输给地面。不同的化学元素具有不同的化学结构,因而对电磁波的反射和吸收特征不同,通过卫星雷达向地面发射电磁波可以对地物进行识别。通过计算机对图像进行识别大致可以分为3 大步骤:信息获取、特征提取和图像分类识别。
为了提高图像中的目标图像信息,需要对获取到的原图进行图像预处理。常用的预处理方法有灰度化、几何变换、图像增强、滤波等。由于彩色图像包含的信息量大,处理速度比较慢,所以一般需要将彩色图像进行灰度化操作;几何变换是减小几何失真对图像识别的影响;图像增强则是增加图像目标之间的对比度,可以更准确地提取出目标图像;因输入的图像会掺杂一些噪声,为了去除噪声对图像提取的影响,所以在图像识别任务中都会进行滤波操作。
对于遥感图像的特征提取,传统的方法都是利用地物各目标的光谱特性进行水体识别,阈值的选择决定了水体信息提取的精确程度。随着深度学习在遥感图像目标识别中的应用,特征提取过程变得更加智能化。图像识别、分类是根据提取的图像特征设定某种判定规则,使得在该规则下误差函数最小。
2 水体识别方法
2.1 阈值法
阈值法又被称为模型分析分类法,基于水体光谱特征曲线,选择合适的波段构造模型。用于遥感图像水体识别的主要方法有单波段阈值法和多波段阈值法,多波段阈值法又分为谱间关系法和水体指数法。阈值分类法的结果好坏取决于选取的准则函数的好坏。
单波段阈值法利用水体在近红外波段上反射率较低,易与其他地物区分的特点,选取单一的红外波段,通过多次实验,最终确定一个灰度阈值,将其作为水体与其他地物的区分阈值,是最简易的水体识别方法。在后来的实验中,发现该方法无法将水体与山区阴影准确分离,提取的水体比实际的水体要多,因此使得该方法具有局限性,在对于那些非山区的高光谱遥感图像,应该首选阈值法进行试验,若提取效果不明显则可以选择其他方法。
遥感图像波段众多,波段间具有较强的关联性,利用单波段阈值法进行水体信息提取,不能全面地读取图像信息,谱间关系法通过原始图像波段转换得到的特征波段的光谱特征曲线,构造逻辑判断规则,进而提取水体。该方法能够利用多波段的优势综合提取水体信息,相对于国外学者,国内学者采用该方法较多。
归一化水体指数(normalized difference water index,NDWI)最初由Mcfeeters S K[4]提出,表达式为:

其中,PGreen是绿光波段,PNIR代表近红外波段,NDWI 的阈值范围为[0,1]。该方法虽然在影像水体提取中表现较好[5],然而对于具有较多建筑物背景的水体图像提取效果不够理想。刘怀鹏等人[6]提出了一种NDWI 自约束遥感影像水体信息的快速检测方法,能够减少操作环节,提高检测速度。林顺海[7]将NDWI与改进的FCM 聚类算法结合用于水域信息地提取,结果表明,NDWI 与改进FCM 相结合算法的总体分类精度高达97.1542%,ISODATA 的精确度为94.5682%,NDWI 的精确度为80.2123%。Zhou Y 等人[8]提出一种新的多光谱阈值分割方法(Multi-Spectral Threshold segmentation of the Normalized Difference Water Index,MST-NDWI),与NDWI 相比,该方法能有效减少背景目标的混淆,更精确地提取遥感图像中的水体信息。
在对NDWI 分析的基础上,徐涵秋[9]提出了一种改进的归一化差异水体指数(Modified Normalized Difference Water Index,MNDWI),其表达式为:

其中,PGreen是绿光波段,PMIR代表短波红外波段,利用中红外波段替换NDWI 的近红外波段,可快速、有效地识别水体。经过对不同水体类型遥感图像的实验,取得了比NDWI 好的效果,尤其在城镇范围内的水体识别表现较好。实验还发现,MNDWI 比NDWI 更好地解释水体细微特征,如悬浮沉积物的分布、水质的变化等。对于遥感图像中的阴影,MNDWI 比NDWI能够更好地进行区分。孙佩等人[10]通过分析MNDWI与归一化植被指数(normalized difference vegetation index,NDVI)所构成的二位特征空间中的表现特征,提出了一种能够有效凸显水体影像特征的复合型水体指数(composite normalized difference water index,CNDWI),该方法有效地增加了山体与山体阴影区域之间的区分度,在建设用地和植被等地物之间的差异也具有明显的增强作用。Teshome Talema 等[11]也运用NDVI 与WNDWI 结合的方法提高识别精度。NDWI和MNDWI 在提取水体信息时都或多或少地掺杂无用的背景信息,聂欣然等人[12]提出了一种经验型归一化差异水体指数(Empirical Normalized Differential Water Index,ENDWI),其公式如下:

相比于MNDWI,ENDWI 较好地消除了噪音和部分建筑物错提的现象,提取结果更加精确。
其中,NDWI、MNDWI、ENDWI 3 种方法在城区、湖泊区的分类精度如表1、表2 所示。从表中可以看出,在城区和湖泊区中ENDWI 方法都要优于NDWI和MNDWI 方法,分类精度表现更好,错分误差更小。
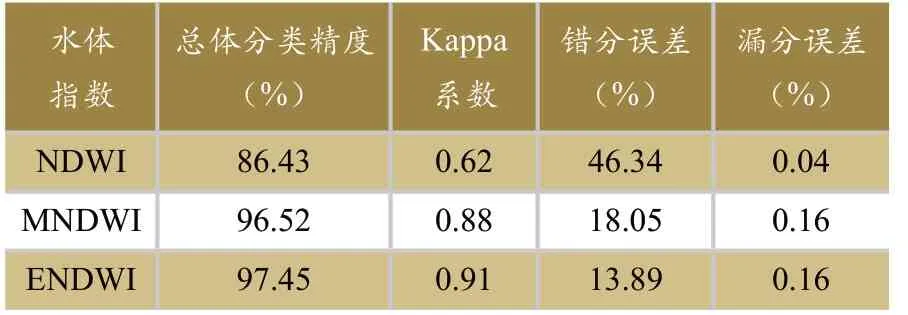
表1 城区3 种水体提取方法精度评价[12]

表2 湖泊区3 种水体提取方法精度评价[12]
2.2 决策树法
决策树分析法利用概率论的原理,利用一种树形作为分析工具,模拟人工分类过程对整个数据集从上往下进行逐级细分。如果已知原样本的类别,可以将类别相似的样本作为一类,向上进行聚类,逐级完成对各类的特征选择。
针对山区阴影难以有效进行分割的问题,陈文艳等人[13]提出了一种HIS 变换结合决策树法提取的山区地形遥感水体信息,对美国卫星Landsat 遥感图像的345 波段进行了实验,结果显示,该方法可以较好地提取复杂背景中的水体信息,有效地区分水体与山体阴影,经对比,效果优于MNDWI。陈静波等人[14]基于知识决策树对北京市多光谱影像进行水体识别实验,并利用密度聚类法(density-based spatial clustering of applications with noise,DBSCAN)描述的空间密度特征区分城市水体和建筑物阴影,并取得了理想效果。张红梅等人[15]设计了一种基于数字高程模型与指数提取的决策树分类方法以提高识别精度,通过组合MNDWI、NDWI、比植被指数、主成分分析,结合DEM 构建决策树规则,结果表明,该方法同样能够有效区分山体阴影和水体,精确地提取出水体信息。李昔纯等人[16]采用全极化TerraSAR 数据的HH、HV、VH、VV 的后向散射及其之间的计算作为决策树算法,实现水体等识别的基础,该方法有效地提取图像中目标的纹理特征,精确的提取目标图像。
2.3 支持向量机法
支持向量机(support vector machine,SVM)最早于1964 年被提出,随着人工智能的发展,被陆续的应用到了人像模式、文本分类等一系列模式识别的问题中[17-18]。SVM 是一类按监督学习方式对数据进行二分类的广义线性分类器,其决策边界是学习样本求解的最大边距超平面[19]。假设有两个类别的训练数据(x1,y1), (x2,y2),…, (xm,ym),其中,x∈i∈ℜN是一个特征向量,yi∈{-1, +1}表示样本的数据类别。如果这两个类别可以被某个空间的超平面ω·x+b=0 所分割,那么最优超平面即为能分割数据的最大距离超平面。求解ω和b的最优解就是一个求解约束最优化的问题。
SVM 能否具有好的分类性能,主要看核函数的类型选择和参数设置[20]。一幅图像的色彩分布可以看做是一种概率分布,那么图像可以由其各阶颜色矩来描述[21],通过提取颜色矩可以提取水样本图像的特征,最后通过SVM 支持向量机作为水质平键分类模型,实验表明,该方法具有较好的分类效果和实用价值。对Sentinel-1 SAR 遥感图像通过大气校正、几何校正和裁剪图像的预处理方法,再进行GLCM 提取特征值,将其送入SVM 分类,实验结果表明,SVM 分类方法不仅可以保留图像细节,还可以保留较好的边界细节。相比于ML、NN 等分类方法,分类准确度更高[22]。基于有监督的SVM 分类识别模型对遥感图像进行湖、冰分类[23],实验结果表明其精度较高。将SVM 分类算法和MSWI 算法进行实验比较[24],发现SVM 更适合GF-2 地表水的提取。采用RBF 函数作为SVM 的核函数,对高分辨率遥感图像进行分类识别[25],结果采用Kappa 系数进行度量,结果表明,用SVM 分类算法对高分辨率遥感图像进行分类时,分类效果理想,执行性和适用性强。具有较好核函数的SVM 分类结果固然精确,但图像的特征提取还是需要人为干预,这就使得该方法具有一定的局限性。
2.4 深度学习法
深度学习最先由Hinton G E 等人[26-27]于2006 年提出。作为机器学习的新方向,它的引入使机器学习更接近最初的目标——人工智能。深度学习的目标是学习数据的内在规律和表达层次,在学习过程中获得的信息对诸如文字、图像和声音等数据的解释有很大的帮助。深度学习通过多层处理,逐渐地将低层特征转换为高层特征后,用“简单模型”即可完成复杂的分类学习任务,所以深度学习可以理解为“特征学习”。对于大规模、大维度的海量数据,深度学习在统计、计算方面有着其独特的优势。深度学习常用的模型有:深度信任网络(deep belief networks)、自动编码器(auto encoder)、稀疏编码(sparse coding)、限制波尔兹曼机(restricted boltzmann machine)、卷积神经网络(convolutional neural networks)。
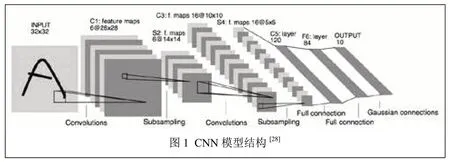
卷积神经网络(convolutional neural networks,CNN)于1998 年被Lecun 等人提出。CNN 是多层结构学习算法,它利用了空间相对关系减少参数数目以提高样本训练性能。CNN 模型结构如图1 所示,CNN是当前深度学习算法中较为流行的一种,由卷积层和池化层交替组成,最后将池化层的结果送全连接层,最后将全连接层送入分类器进行分类处理。卷积层进行线性操作,提取样本的特征,通常为组合卷积,参数有卷积核数量、核大小、卷积步长、填充方式等。在卷积层后加入一个激活函数进行非线性操作来减小梯度消失效果,常用的激活函数有Relu、Sigmoid、Tanh 等。卷积层后的池化层主要用于降低特征图的特征空间,以此来增强特征对于旋转和变形的鲁棒性。随着CNN 的不断演变发展,尚有较为常用的模型有Caffenet、AlexNet、VGG、GoogleNet、ResNet、ResNeXt 等。
在遥感图像水体识别的方法中,基本都是基于图像的光谱特征对目标进行识别,很难充分利用遥感图像的空间信息和光谱信息,虽在一般情况下能够分离出大部分的水体信息,但是在精确度上很难再提升到较高水平。CNN 是为识别二维形状而设计的一个多层感知器,使用了局部感知的特殊理念,将其用于遥感图像的分类识别中,可以充分利用遥感图像的空间信息和光谱信息。
金永涛等人[29]针对遥感图像目标分类的问题,将面向对象方法和深度学习法进行了对比,最终提出了一种结合面向对象和深度学习的新方法,并选用卷积神经网络Caffe 框架进行了实验。传统的面向对象方法很难深刻全面掌握目标形状、纹理特征等,很难对遥感图像地物进行精确分类,而深度学习虽然需要大量带有标签的样本来进行训练,但是根据训练的模型可以精确的对目标进行分类。如果将两种方法合并在一起进行使用,既可以通过面向对象的方法解决训练集匮乏的问题,又可以修正深度学习中没有考虑遥感图像多波段的特性,该方法可以有效提高对遥感图像地表水等地物目标的分类精确度,但是文章在算法结构设计方面不够完整,需要进一步完善。
在将深度学习用于遥感图像目标识别初期,诸多学者都是首先尝试将CNN 与传统方法进行融合以提高分类精度,将CNN 与SVM 结合进行目标识别的方法已经用于很多遥感图像地物识别中[30-32]。文献[33]中选用了CNN_SVM 模型对遥感图像水体进行识别,其中SVM 选用RBF 核函数。文中用特征重构的方法解决了训练数据样本匮乏的问题,将重构后的样本数据送入CNN 进行特征提取,经过数次卷积-池化操作得到全连接数据,最后采用SVM分类器对全连接层特征进行分类。相对于CNN原来的SoftMax 分类器,SVM 能够增加收敛速度,大大减少了训练时间。文献[34]提出了一种基于CNN的多尺度融合方法(BMF-CNN)进行水体识别。随着CNN 模型的网络层数加深,每一层都会丢失一部分信息,到最后就会丢失一大部分信息,只保留具有代表性的特征。采用多尺度特征融合的思想就是将上一层的特征图加到当前层再次进行特征提取,这样就会适当增加上一层的部分特征,以达到对样本数据特征全面学习的目的。一般情况下,基于深度学习的遥感图像目标识别都是集中于从视觉特征到语义类别的自底向上的分类,这种分类的思想忽略了自顶向下的反馈,反馈可以增强模型的鲁棒性和泛化性。对于以上挑战,文献[35]提出了一种自底向上和自顶向下的水体识别方法RCNN 的改进结构。该方法相比于单方向的分类方法,无需先验知识,分类结果更加精准,具有很好的研究和应用价值。
陈前等人[36]采用Deeplabv3 语义分割神经网络与常规卷积神经网络分别对遥感图像水体进行了提取研究。Deeplabv3 框架是基于像素级的语义图像分割方法,与常规卷积神经网络不同的是,Deeplabv3 采用多孔卷积。多孔卷积能够扩大任意卷积层卷积核的视野,并且在Deeplabv3 网络模型中加入了多孔空间金字塔池化(atrous spatial pyramid pooling,ASPP)模型,该模型可以提高在不同尺度上进行采样的准确率,同时对任意尺度的分割都有效果。基于tensorflow 框架的Deeplabv3 的方法对遥感图像数据集进行实验,与常规CNN 相比,CNN 精度要高于Deeplabv3 方法,这是由于Deeplabv3 网络在训练的过程中降低了图像的分辨率,使得水体边缘太过平滑,不能够精细地分离出水体。虽然该方法较CNN 精确度略低,但相对于传统的水体指数法和SVM 方法精确度都要高,说明深度学习的方法能够有效提升识别精度,精确地提取出水体特征,使得提取过程更加自动化、智能化。
3 结语
随着水资源的不断紧缺,对于水质检测、海岸线观测等工作会陆续开展,同时,遥感技术的进步也为这项工作的推动奠定了基础。我国遥感技术正在飞速进步,未来将会有大量的高分图像应用于军事、环境监测、地理观测等一系列应用中。水体提取是进行环境监测环节中非常重要的一项任务,能否精确地识别出水体决定了后续进行数据分析的结果。
目前,对于遥感图像水体识别技术以经逐渐地向深度学习方向发展。深度学习优秀的特征提取能力注定其识别精度要高于传统的识别方法。目前尚存在几大挑战:1、单一的传感器仅局限于单一技术参数中,很难全方位展现出目标特性;2、对于有监督学习,需要大量人为标记的数据样本,伴随着卫星精度的上升、样本数据的丰富、特征提取模型方法的成熟,遥感水体识别技术将会朝着自动化、无监督学习方法的方向发展,对于通过遥感图像精确识别水体有一定的应用指导意义。
猜你喜欢
ELLE世界时装之苑(2024年5期)2024-05-14 09:45:39
建材发展导向(2022年2期)2022-03-08 01:43:38
北京航空航天大学学报(2021年9期)2021-11-02 08:24:26
建材发展导向(2021年14期)2021-08-23 00:57:44
电子制作(2019年11期)2019-07-04 00:34:38
北京航空航天大学学报(2018年1期)2018-04-20 06:38:17
中国环境监察(2017年3期)2017-05-14 06:19:02
高师理科学刊(2016年8期)2016-06-15 20:27:45
西藏科技(2015年4期)2015-09-26 12:12:58
电视技术(2014年19期)2014-03-11 15:38:20
