基于无线通讯的新型提升机松绳保护系统设计与研究
2021-05-08 00:30关小智汪庆留张斌斌
煤炭工程 2021年4期
关小智,李 健,汪庆留,张斌斌
(华亭煤业公司山寨煤矿,甘肃 华亭 744100)
矿山提升运输系统的安全面临着许多挑战,随着提升机自动化程度的提高,其系统安全系数不断提升,但仍旧存在一些安全问题,矿井提升系统具有环节多、控制复杂、运行速度快、惯性大、运行特性复杂的特点[1]。目前,矿井提升机松绳保护大部分采用行程式或者触点开关,根据现场使用情况,该装置可靠性差,为解决该问题,通过对矿井提升装置松绳保护系统的研究,设计出一种基于无线通讯的新型提升机松绳保护系统,该装置能准确地、实时地检测提升机的首绳在运行和停止时的状态,提升机在运行过程中,出现松绳状况,装置将通过无线发射装置将数据传送给提升机电控系统进行处理,确保矿井提升系统的安全运行,并且该系统可推广在斜井串车提升中使用。
1 系统总体设计和配置
新型提升机松绳保护装置,能准确地、实时地检测提升机的首绳在提升机运行和停止时的状态。如果提升机在运行过程中,出现松绳状况,装置将通过无线发射装置将数据传送给提升机电控系统,电控系统接收到松绳信号后对提升机做出相应的处理,从而避免事故发生或向更严重的方向发展。
在现有的竖立井矿井系统中,罐笼作为井下人员出入、物料运输的通道,因为无法进行电源和信号线缆的连接,在矿井系统运行中,容易造成信息死角,系统存在一定的安全问题[1]。
针对这一问题,通过数据采集模块对罐笼首绳连接松绳监测,同时利用无线通讯方式和地面控制系统实时连接,实现罐笼首绳松绳的报警和提升系统的及时停车排查,达到了安全实用的效果。
1.1 系统设计
系统通过采用无线通讯方式,实现罐笼到井口地表的数据通讯,将罐笼内松绳接近开关检测数据实时传送到地表控制室,实现提升系统对罐笼松绳的实时监测和自动控制,并通过远程监控中心实时监控松绳系统的运行状况。松绳检测系统整体拓扑如图1所示。
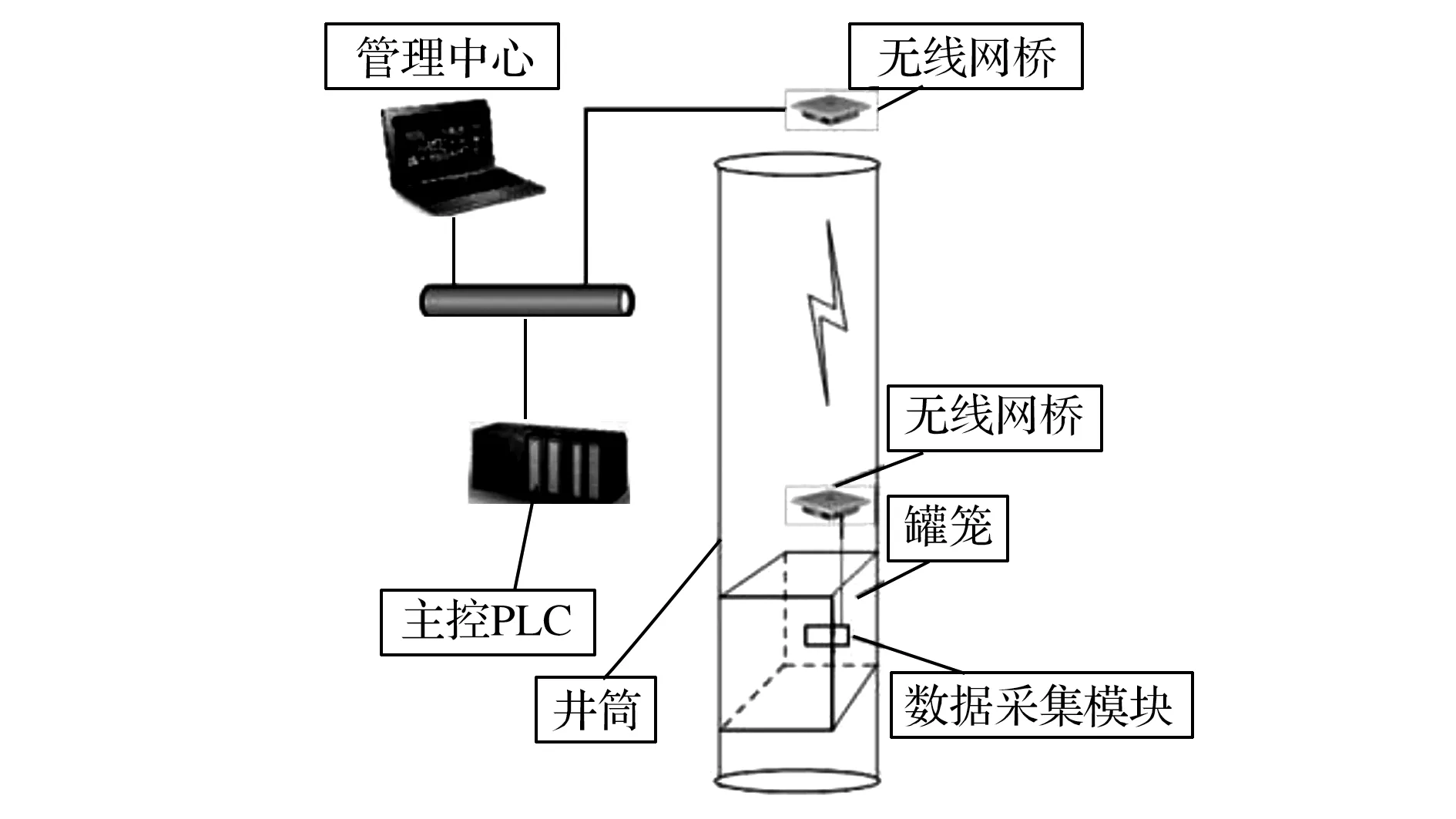
图1 松绳检测系整体拓扑
1.2 系统配置
系统采用先进的无线充电、无线通信系统及IP技术,解决了罐笼信号和电源问题,实现了数据信号在无线及局域网上进行传送,达到了罐笼松绳及时报警、电源实时监测等功能,是一套纯数字、免维护的系统。该系统结构清晰,将终端接入系统网络进行信息联锁,即可实现提升系统松绳保护下的安全控制运行。
根据系统设计要求和目标主要采用元件包括有以下设备:①无线充电发射端:实现将AC220V电源的输入实现高频电磁发射;②无线充电接收端:实现给DC12V锂电池电源的充电;③锂电池:40AH;④信号检测板:实现传感器信号的数据转换;⑤网桥:实现罐笼到地面的数据通讯;⑥信号输出板:实现检测信号的恢复还原;⑦报警器:实现松绳声光警示;⑧交换机,百兆网络交换机;⑨检测开关:检测松绳动作。
2 系统机械原理
罐笼松绳保护装置主要由UPS电源、接近开关、无线收发射装置、和罐体的悬挂器组成,利用提升机罐笼顶部的悬挂装置的机械结构在提升机重载和松绳时发生的弹性形变,产生机械位移[2],带动罐笼本地的防坠器,将罐笼稳绳钢丝绳加紧;同时通过安装在罐笼内部的接近开关检测其与罐笼主体产生的位移。
从机械监测结构图中来分析,罐笼主体A通过悬挂器E、首绳C被提升机电控系统对罐笼进行提升和下放运行[12]。罐笼主体与悬挂器轴体固定连接[3]。松绳保护装置与监测结构如图2所示。
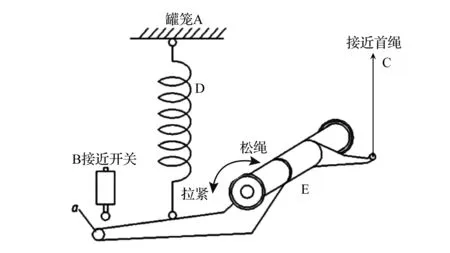
图2 松绳保护装置与监测结构
在正常情况下(即提升系统无松绳情况),由于罐笼的自重和其中的载物重量将罐笼主体A相对向下压,悬挂首绳拉紧,悬挂装置E逆时针转动并拉动弹簧使缓冲弹簧D发生弹性形变而拉伸,从而使罐笼主体A与悬挂器臂a产生相对位移。悬挂器臂比较长,相对位移量也大,当悬挂器转动一个小的角度时,根据杠杆原理,杠杆臂越长杠杆的端的移动位移越大,所以采用悬挂器臂带动防坠器[13]。当提升系统罐笼发生松绳时,弹簧靠自身弹力拉动悬挂器顺时针转动带动悬挂器臂a向上移动,悬挂器臂a拨动防坠器的楔形[6]块向上发生位移加紧稳绳,实现罐笼的防坠机械保护[4](如图3所示)。

图3 罐笼防坠楔形结构
3 系统电气原理
当提升机系统在运行时瞬间出现松绳现象时,安装在罐笼内部的悬挂器发生动作转动,松绳检测接近开关被触发动作,触发其信号通过数字无线网桥发出松绳信号,接收端接收到松绳信号,同时将松绳保护信号送入提升机电控系统进行相应的保护处理。
罐笼松绳电气检测分为地表和罐笼内设备(松绳保护电气原理图如图4所示)。罐笼内的电气检测设备包括电池、欠压检测模块、信号采集模块、无线网桥模块和松绳检测开关等。地表设备包括交换机、信号采集模块、电源模块和提升系统等。

图4 松绳保护电气原理
罐笼内,根据以上分析原理,当罐笼系统发生松绳时,松绳检测开关发生动作,将信号送给信号采集模块,采集模块通过数据处理把数据转换为以太网数据,再送给无线网桥模块,通过无线网桥系统将数据传送到地表,实现罐笼系统数据的检测和采集。
松绳检测信号传送到地表后,数据进入信号采集模块,通过采集模块的数据处理,将网络数据转换为开关信号,实现对松绳检测信号的实时显示[9]。同时,无线网桥模块连接到交换机,通过交换机与电控系统相连,实现松绳检测和提升机PLC运行信号的联锁控制[5]。并且在上位机和管理系统中心可实时的对松绳检测状态进行查看和检测。
同时,罐笼内也实时对供电电池电压进行实时监测,并通过信号采集模块和无线网桥将数据传送到地表控制系统,实现对罐笼松绳保护系统电源的监测。当电压低于额定值时,地表报警箱将实现电压报警,确保地表人员能实时监测电源情况;保证系统正常运行。
4 系统供电电源解决方案
由于罐笼为移动设备,自身无法提供电源,因此为实现电气松绳保护需要在罐笼内增加可持续性电源。该方案采用电池与自动无线充电方式[8]实现罐笼内的自动供电和充电如图5、图6所示。充电器由发射端和接收端组成,其原理是将传统变压器的感应耦合磁路分开,实现电源和负载之间不需要机械连接(比如电源线) 进行能量传递[11]。系统主要分为:初级变换器、感应耦合结构、次级变换器三部分。其特点是工作频率和谐振系统的频率是不一致的,控制方式可以使调频、定频移项、占空比,或者混合方式。

图5 电磁感应式无线电力传输

图6 罐笼无线充电原理
4.1 发射端配置
支持最大传输功率:100W;输入电压:宽电压输入,输入电压范围:12~24VDC±5% (可接AC220V/24V电源变换器);系统工作频率:100~150kHz;
工作距离:6mm(最佳),Max 30mm(采用大线圈方案);传输效率:实测90%(接收端输出24V,4.2A,功率100W);水平方向:偏离中心±3mm;垂直方向:2~5mm(最佳),Max 30mm(采用大线圈方案);通信功能:发射端可以根据接收端的功率实时调整发射功率。
4.2 接收端配置
支持最大传输功率:100W;输出电压:12V;输出电压可调,可以输出5~24V;输出电流:24V/Max 4.2A(Max 100W);工作频率:100~150kHz;工作距离:5mm(最佳),Max 30mm(采用大线圈方案);传输效率:实测90%(接收端输出24V,4.2A)。
4.3 电源功率计算及配置
本设计电源采用磷酸铁锂电池(12.8V)供电,电池电压:12.8V,功率:40AH。由以上100W的无线充电方案充电,充电电流为7A。在电池充满时,期间没有任何充电可供罐笼内设备时(功率12W)~1.25AH,正常运行32h。
根据技术要求的罐笼使用情况和时间情况,罐笼在井口及各水平期间足可以将电池运行放电补充回来,实现无人参与的无线自动供电。
5 使用效果
新型的提升机松绳保护装置,对提升机运行时的松绳保护将起到至关重要的作用。与此前的松绳保护相比,实现了真正的松绳保护监测,能在最快的时间内将松绳保护信号送入提升机电控,达到对罐笼系统实时和准确的保护[7]。
此技术在矿山提升机投入应用以来,安全运行已2000多个小时,应用效果良好,深得好评,得到了矿区领导的一致认可。经过一段时间以来的应用,与传统的松绳保护相比具有明显优势,传统的松绳保护采用行程开关或者触点开关监测钢丝绳张紧状态下和松绳后的指定方向的偏移量,罐笼钢丝绳松绳后偏移方向具有一定的不确定性,可靠性差[15];传统的松绳保护,行程开关或者触点开关只能安装在某个监测点,不能对钢丝绳绳体全覆盖监测,对松绳检测响应时间慢;传统的松绳保护,在提升机电控系统中仅仅显示是否动作,不能对日常的钢丝绳松弛量进行直观检测[14];而采用本技术的松绳保护是将正常状态下和松绳状态下钢丝绳首绳和罐笼主体之间的距离进行监测,具有可靠性高、响应时间快以及监测数据可视化的优点。
6 结 语
针对传统的提升机罐笼保护不可靠等问题,采用一种新型的罐笼保护装置,通过直接检测绳体与提升机系统罐笼的相对位置来确定提升首绳是否松动,并且通过无线传输将检测点送到井口设备,进行提升系统的机械和电控控制。通过将保护装置安装在移动过程中的罐笼内部,以罐笼主体与其悬挂装置之间的弹簧在提升机松绳前后发生的形变准确检测其松绳情况,最终快速将信号通过无线方式发送到提升保护系统,实现及时发现问题并进行快速处理的目的,从而提高了矿山提升系统咽喉(竖井提升系统)部位通道的安全性和可靠性。
猜你喜欢
世界有色金属(2022年14期)2022-10-21
电子乐园·上旬刊(2022年5期)2022-04-09
家庭影院技术(2021年6期)2021-07-28
无线互联科技(2021年4期)2021-04-21
阅读(快乐英语高年级)(2019年2期)2019-09-10
小猕猴智力画刊(2019年3期)2019-04-19
小猕猴智力画刊(2017年6期)2017-07-03
中小学实验与装备(2016年6期)2017-01-19
中国高新技术企业(2015年13期)2015-04-30
环球时报(2009-12-25)2009-12-25