无人机航测技术在大型露天采坑监测中的应用
2021-05-08 00:30邱亚辉申红梅范冬丽王世博
煤炭工程 2021年4期
邱亚辉,申红梅,范冬丽,王世博,郎 博
(1.北京工业职业技术学院,北京 100042;2.四川省安全科学技术研究院,四川 成都 610045;3.达州市煤矿瓦斯远程监控中心,四川 成都 635000)
随着浅部矿产资源的不断开发利用和逐渐耗竭,深凹露天矿成为露天矿山的发展趋势[1]。在深凹开采过程中大量的爆破、机械开挖等工程活动不仅使得采场边坡形成结构破碎、坡度陡峭的高危临空面,且极易导致变形体滑坡[2-4]。大型露天矿山采坑存在占地面积大、地形复杂多变等特点,使得传统监测手段劳动强度大、监测周期长、精度不能保证,特别是在露天矿边坡容易出现的滑坡裂缝地段,测绘技术人员进入测区进行测量存在很大的安全隐患[5]。因此,深入开展大型露天采坑开采范围、边坡稳定性和开采动态监测技术研究,对有效控制边坡工程灾害、矿山安全监管具有重要意义[6]。
无人机(UAV)航测技术可以快速获取高分辨率、高精度、直观的实景三维模型数据[7]。解决了传统常规测量技术耗时耗力的难题。赵红泽、黄军等人研究发现利用无人机搭载数码相机快速获取矿区航测影像,配合适量控制点得到符合精度的三维数据已成为可能[8,9]。目前,无人机航测平面精度可达厘米级,大大提高了露天矿山监测精度[10]。Giuseppe Esposito等人利用无人机摄影测量技术对露天矿地表范围和体积数据获取进行应用研究,能够及时准确地进行矿山测量与储量计算[11]。黄皓中开展了基于无人机数据的露天矿三维时空对比及微地貌分析[12]。韦小儒采用无人机倾斜摄影对露天矿山开采范围、动态储量进行了监测应用研究。马国超等人基于三维激光扫描和无人机倾斜摄影技术对露天采场开展了安全监测应用研究[13]。
基于无人机航测技术获取大型露天采坑的多时相高空间分辨率数字高程模型(DEM)数据,对大型露天采坑开采范围、边坡风险性分析和开采量动态监测,从而支撑大型露天矿山科学化管理,为大型露天采坑开采监督管理提供数据支撑。旨在研究建立一个快速、精准和低成本的技术来监测大型露天采坑开采,用科技手段支撑矿山安全监管。
1 研究区概况
本研究区域位于四川省攀枝花市的徐家沟大型露天采坑,产品为单一钒钛磁铁矿,采出原矿品位28.32%。矿区位于金沙江北岸的密地区域北部,采场位于山体靠山顶一侧,矿区构造主要有辉长岩体原生层状构造、断层及节理,其中断裂构造对矿体影响和破坏较大。矿区出露地层较简单,仅见有第四系、第三系上统昔格达组,三叠系上统大荞地组、丙南组、宝鼎组及前震旦系康定群冷竹关组[12]。采坑开采规模为800万t/a,开采面积5.9838km2,开采深度1812~1042m。生产段高15m,工作平台宽度不小于45m,工作阶段坡面角70°。
2 研究方法
采用固定翼无人机航测技术获取露天采坑三维点云数据,经点云去噪处理、剔除植被等预处理,生成DEM数据。根据露天采坑DEM数据,提取采坑开采范围,开展边坡风险性分析,动态监测采坑开采量,辅助矿山数字化安全监管。研究流程如图1所示。
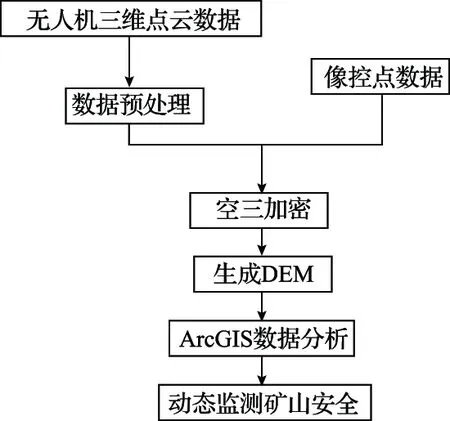
图1 研究流程
2.1 无人机航测数据获取
无人机航测数据获取主要包括现场踏勘、无人机机型选取、航线申请与规划、像控点布设与测量、航测飞行、影像质检等环节。
本次实验共开展了两次野外飞行任务,分别为2016年12月以及2018年5月,使用的固定翼无人机平台为飞马F1000无人机航测。因露天采坑地物类型复杂多变,在航摄区域未必都有合适的像控点,为提高刺点准确率,保证成图精度,在进行外业作业前使用腻子粉提前布置像控点标志,标志为“十”型。利用Leica GS14型 GPS,接入四川省测绘局CORS网络获取像控点测量坐标。2016年和2018年分别有效测量了14个和15个像控点坐标。野外测量获取的像控点经坐标转换为国家2000平面坐标和1985高程基准。
无人机两次航测飞行航高分别设置为865m和919m,在航高不同的前提下,考虑数据量与数据精度均衡,选择航向重叠度均为80%,旁向重叠度分别为75%、70%。无人机根据规划的航线自动获取正射照片和POS数据。无人机航测详细数据见表1。
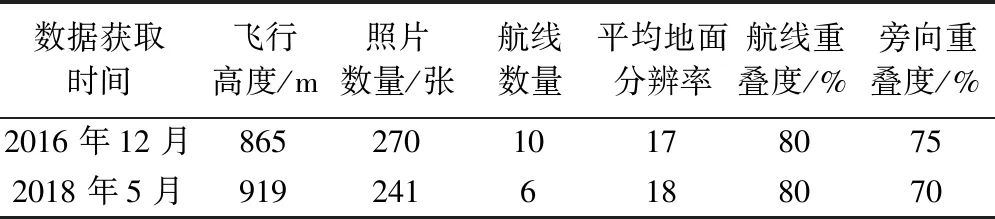
表1 2016年12月和2018年5月无人机航测参数
2.2 DEM生成
利用无人机航测获取的影像、POS数据以及地面像控点,采用三维结构的运动重建技术SfM(Structure from Motion)工作流[13],生成三维点云已是一种成熟的方法。SfM 方法基于像对间的特征匹配数据,通过迭代光束平差过程(Iteratve Bundle Adjust-ment Procedure) 自动求解相机方位和场景几何形态等信息[14,15]。SfM工作流主要有图像特征匹配、空三加密、生成产品等[16,17]。本研究采用ContextCapture Master软件生成了某大型露天采坑的三维点云数据,其中2016年12月和2018年5月的像控点平均均方根误差分别为0.06m和0.07m,满足大型露天矿山监测需求。在Maptek I-Site Studio软件中对点云开展了去除噪声、剔除植被等预处理,并利用ICP(Iterative Closest Point 迭代最近点算法)算法对两期数据开展匹配,配准误差为0.06m。ICP算法核心是最小化一个目标函数:

基于自然领域插值方法,用匹配以后的点云创建DEM,生成的露天采坑两期DEM数据如图2所示。

图2 露天采坑2016年12月和2018年5月DEM
2.3 开采范围监测
在无人机航测中,可以得到高分辨率的真正射影像图(True Digital Orthophoto Map,TDOM)数据和高分辨率的三维实景模型数据。在图2(a)中,蓝色线为2016年12月某大型露天采坑开采范围。在图2(b)中,红色线为2018年5月某大型露天采坑开采范围。通过分析图2可知,在2016年12月至2018年5月期间,该露天矿山主要在底部深凹开采,开采范围无较大变化。
2.4 露天矿山边坡分析
基于DEM数据,利用ArcGIS地形分析功能,获取露天采坑边坡坡度数据,辅助分析边坡的风险性。从图3(a)(b)中可以看出某大型露天采坑边坡坡度数据凸出的线性特征具有较好的识别和提取特性,可以从坡度图上清晰的识别出露天采坑在开采过程中形成的阶地特征。在2016年12月和2018年5月坡度图上可以看出某露天采坑西南面发生明显变化,主要是因为存在滑坡(图3(c))。该滑坡发生于2012年8月20日,面积约44224.7m2,方量约12万m3。在采场东北角存在坡度变化明显区域,是因为开采矿石所致(图3(d))。利用DEM提取大型露天采坑坡坡度数据可高效发现采场边坡崩滑现象,结合三维实景模型,可切实加强露天采坑边坡安全管理。

图3 大型露天采坑边坡坡度分析
2.5 露天采坑开采监管
针对政府部门和企业对露天采坑开采监管需求,本文研究利用两期DEM差值获取采坑开采变化情况。为了获取露天采坑高精度开采变化数据,需消除两期DEM差值的误差,误差主要包括测量误差、配准误差等[18]。
2.5.1 误差差值计算
利用ArcGIS的栅格计算器,计算得到露天矿山的DEM差值。在完成差值计算之后,仍然需要考虑存在不确定性ζH:
H=HDEM+ξH
(2)
其中,HDEM为DEM比较计算完成后的高程差;H为误差分析后的高程差;ξH为误差值。ξH由高斯误差传播理论获取,公式如下[15]:
式中,ξ2016=0.06为2016年测定的14个控制点计算均方根误差(RMSE),ξ2018=0.07为2018年测定的15个控制点计算均方根误差(RMSE),ξICP=0.06是点云ICP匹配的均方根误差。经计算得到最小检出限ξH=0.11,即高程差变化小于ξH视为是由于误差造成,而只有当高程值变化大于ξH时,才作为高程差的实际变化量。
2.5.2 开采动态分析
在ArcGIS中利用栅格计算器中的con函数,将|HDEM|≤0.11m的部分赋值为0m,获得露天采坑开采变化图,如图4所示。通过分析图4可知,某大型露天采坑开采变化区域位于采场底部,主要因为是矿山开采活动引起的。比如,在图4中1#区域的高程降低是因正常开采活动造成,增高区域主要是因修筑道路和堆积矿石。
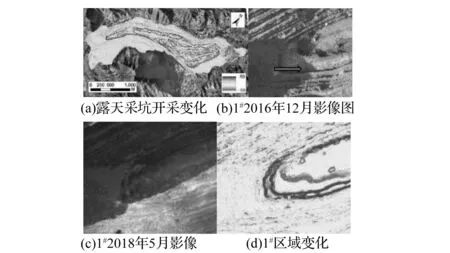
图4 某大型露天采坑开采监测
3 结论与讨论
1)无人机航测技术具有成本低、精度高、时效性高、环境适应性强等特点,可以有效获取露天采坑的三维实景模型,能够直观清楚地观察露天采坑的开采情况,能够为露天矿山监管提供可视化的数据支撑。
2)讨论了采用固定翼无人机航测技术获取露天采坑三维点云数据,经点云数据去噪、剔除植被等预处理,可生成露天采坑高精度DEM数据。
3)基于DEM数据,经地形分析提取露天采坑边坡坡度数据,能够凸出边坡的线性特征,能够有效发现边坡的崩滑现象。
4)露天采坑多期DEM差值数据,经高斯误差理论剔除误差值之后,可以获得露天采坑动态变化情况,可实现露天矿山快速、有效的安全监管。
猜你喜欢
矿冶工程(2021年6期)2022-01-06
有色金属(矿山部分)(2021年4期)2021-08-30
有色金属(矿山部分)(2021年4期)2021-08-30
有色金属(矿山部分)(2021年4期)2021-08-30
矿冶(2021年4期)2021-08-25
昆明医科大学学报(2021年5期)2021-07-22
电子乐园·上旬刊(2021年8期)2021-05-16
有色金属(矿山部分)(2021年2期)2021-04-02
高中时代(2017年7期)2018-02-24
南方农业·下旬(2017年8期)2017-10-23