基于Wi-Fi信号的室内人员定位追踪系统设计与实现
2021-05-07 09:12曾光丁宇凌黄健盛黄杨灵
现代信息科技 2021年23期
曾光 丁宇凌 黄健盛 黄杨灵
摘 要:文章提出一种WKNN优化算法,设计与实现了基于Wi-Fi信号的室内人员定位追踪系统。针对传统WKNN算法中利用加权平均计算权重不稳定,存在一定误差的问题,引入可以不断递归处理数据的卡尔曼滤波,获取加权系数的最优估计值,以此提高室内定位精度,并在此基础上设计与实现了基于Wi-Fi信号的室内定位软硬件系统。测试结果表明,改进后的算法在特定环境中的定位误差可控制在1.2米以内,提高了基于Wi-Fi信号的室内定位的精度与稳定性,达到了预期效果。
关键词:室内定位;Wi-Fi;WKNN;卡尔曼滤波
中图分类号: TP311;TN929.5 文献标识码:A文章编号:2096-4706(2021)23-0001-05
Design and Implementation of Indoor Personnel Positioning and Tracking System Based on Wi-Fi Signal
ZENG Guang, DING Yuling, HUANG Jiansheng, HUANG Yangling
(Guangdong Communication Polytechnic, Guangzhou 510650, China)
Abstract: In this paper, a WKNN optimization algorithm is proposed, and an indoor personnel positioning and tracking system based on Wi-Fi signal is designed and implemented. Aiming at the problem that the weight calculated by weighted average in the traditional WKNN algorithm is unstable and there are some errors, the Kalman filter which can continuously recursively process the data is introduced to obtain the optimal estimation value of the weighting coefficient, so as to improve the indoor positioning accuracy. On this basis, the indoor positioning software and hardware system based on Wi-Fi signal is designed and implemented. The test results show that the positioning error of the improved algorithm in a specific environment can be controlled within 1.2 m, which improves the accuracy and stability of indoor positioning based on Wi-Fi signal and achieves the expected effect.
Keywords: indoor positioning; Wi-Fi; WKNN; Kalman filter
0 引 言
按照應用场景的不同,空间定位技术可以分为室内定位和室外定位。其中,室外定位(如GPS、伽利略、北斗卫星导航等)在近几年得到迅速发展,基本可以满足不同行业和领域的定位需求[1]。相比之下,受室内结构与布局的复杂的影响,并且室外定位常用的卫星信号在室内复杂环境下衰减严重,定位精度锐减,导致室外定位技术无法有效应用于室内,从而使得被称为位置服务“最后一公里”的室内定位技术发展滞缓[2]。
然而,在安全施工、灾害预防、救援指引、室内导航等领域,通常面对的是复杂的未知环境,尤其是在室外定位技术效果受限的封闭或半封闭场景(比如隧道、矿井、仓库、地下停车场等)中,良好的室内定位技术将能帮助人们很好地掌握室内境况,对相关的救援或指引具有极其重要的作用。
本文在对比各种室内定位技术的基础上,选择独具优势的Wi-Fi技术,针对当前Wi-Fi室内定位技术存在定位精度与稳定性不高的问题,通过基于RSSI的位置指纹算法,利用卡尔曼滤波优化其中的WKNN算法,并通过设计软硬件系统进行应用实验,验证了本文算法的实用性和有效性。
1 室内定位技术
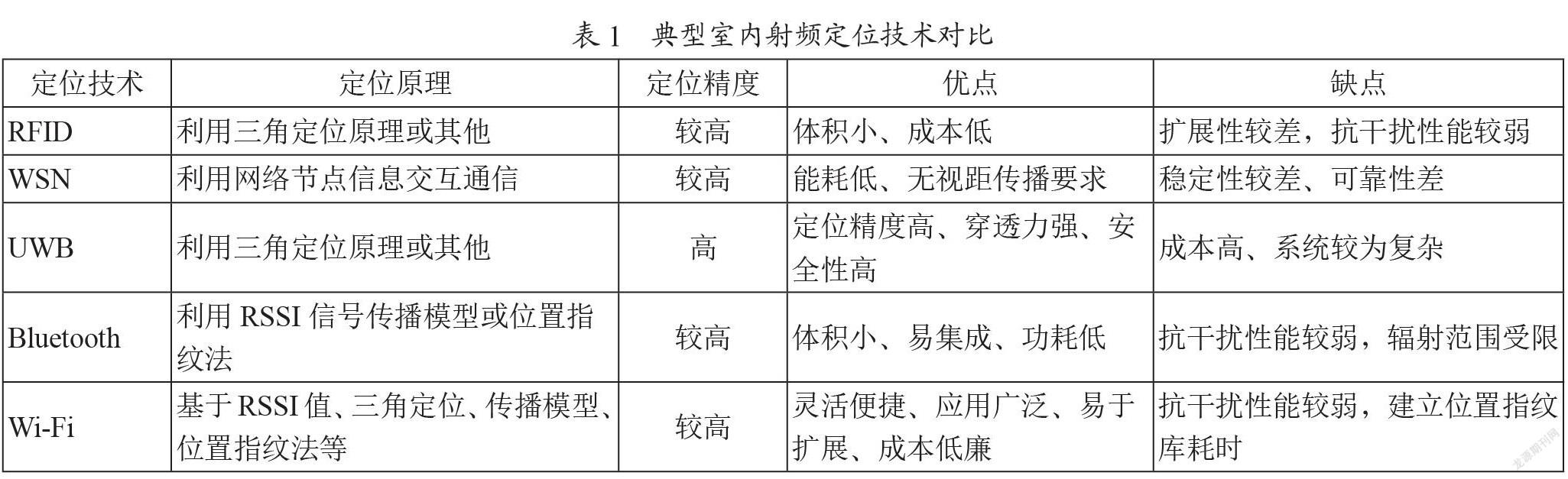
当前室内定位的主流技术包括视觉和射频两个方向:视觉方向主要是利用摄像头,结合图像处理算法对室内物体进行定位判断,这对摄像头视角、图像处理效率以及存储容量均有较高的要求[3];射频方向是当前探索领域应用最广的技术,主要包括无线射频识别(RFID)、无线传感器网络(WSN)、超宽带(UWB)、蓝牙(Bluetooth)以及Wi-Fi技术[4]。相较于其他几种射频技术,Wi-Fi技术具有移动灵活、成本低廉、应用广泛、扩展及铺设便捷等优势,是当前最具发展前景的室内定位技术之一[5]。几种典型室内射频定位技术的比较如表1所示。
基于Wi-Fi的室内定位技术所面临的主要挑战之一是,复杂环境的变化会带来信号强度的动态变化,进而导致建立位置指纹库耗时、定位精度不稳定等问题[6]。本文基于上述问题,选取基于RSSI的Wi-Fi室内定位技术,通过增设Wi-Fi节点以及优化WKNN位置指纹定位算法,来提高室内目标定位的精度与稳定性,并依此建立实物演示系统,验证了本文方法的有效性。
2 室内定位算法
2.1 基于RSSI的位置指纹算法
基于接收信号强度指示(Received Signal Strength Indication, RSSI)的位置指纹算法,是通过在室内布控硬件设备(本文称为“参考节点”),然后测量室内移动物体(本文称为“移动节点”)与参考節点之间的信号强度,据此综合估算移动节点的相对位置[7]。由于参考节点的具体位置坐标信息是已知的,相较于其他基于模型传播的算法,已知确定的环境参数,能带来较高的确定性,进而能够获得较高的定位精度。
常见基于RSSI的位置指纹算法主要有信号空间最近邻法(NNSS)、K最近邻法(KNN)、加权K近邻法(WKNN)以及概率匹配算法等[8],这些算法的对比如表2所示。
综上,相较于其他算法,WKNN算法具有硬件配置要求简单、算法计算逻辑简单、定位精度较高、稳定性较强等优势,因此,本文选择WKNN作为实现室内定位的位置指纹匹配算法。
WKNN算法是在KNN的基础之上引入权重的概念,依此提升定位精度及定位稳定性。由于Wi-Fi信号受环境因素干扰较大,移动节点在不同位置时,电磁波的信号强度会发生不同的变化,这可能跟初始限定环境中测量的与参考节点之间的信号强度有较大的波动。基于此,WKNN引入权重的概念,按照一定规则为邻近的不同参考节点赋予不同的权重,距离某参考节点越近,被赋予的权重越高,进而可提升移动节点的定位精度及定位稳定性[9,10]。假设移动节点周围最邻近的参考节点个数为K,在用WKNN算法对移动节点进行坐标定位时,可以通过式(1)获得。
(1)
其中,(X,Y)表示移动节点的位置坐标;ε是为了避免权重ωi等于0而设定的一个非零实数,一般通过具体环境试验对比后获得;ωi则表示离移动节点第i个最邻近参考节点的权重,通过式(2)计算权重。
(2)
其中,di表示第i个参考节点位置坐标与移动节点实际位置坐标之间的距离。
2.2 WKNN算法的优化
相较于KNN,WKNN的突出特点是引入了权重的概念,提高了移动节点位置坐标的估算精度,但是传统的WKNN算法中,权重计算大多是通过对最邻近K个参考节点进行加权平均,得出移动节点位置坐标的估算结果,然后与数据库中的位置范围进行匹配,最终得出估算的移动节点位置坐标。在这个过程中,不可避免地会受到实际环境因素的影响,造成一定的误差,带来定位精度的不稳定。
本文针对加权平均算法计算不稳定,存在一定误差的问题,引入可以不断递归处理数据的卡尔曼滤波,获取加权系数的最优估计值,进而提高移动节点的室内定位精度,具体的算法流程如图1所示。
3 系统设计与实现
基于Wi-Fi信号的室内人员定位追踪系统由上位机软件和节点硬件设备两部分组成,其中上位机软件用于实时显示定位信息,实现系统管理功能,如系统参数设置、Wi-Fi网络设置、静态地图导入、节点坐标调整等;布控在室内的节点硬件设备用于实时获取定位信息,主要包括含Wi-Fi模块的定位参考节点/移动节点,也可以由现有带RSSI功能管理的路由器代替参考节点。本系统的整体框架如图2所示。
3.1 上位机软件实现
室内定位信息的显示主要通过上位机软件实现。首先,接收室内定位区域移动节点传送来的Wi-Fi信号强度数据,对信号数据进行降噪处理;其次,将经过降噪处理的数据代入改进后的定位算法,获得移动节点的具体位置坐标;最后,将计算结果实时显示在PC端静态地图中,代表用户具体位置的移动节点亮红灯显示,预先布设在室内固定位置的参考节点亮蓝灯显示。移动节点的位置坐标刷新以秒为单位,可以自行设置刷新时间。具体的流程图如图3所示。
上位机软件启动后的主界面菜单栏包含导入地图、启动联网、开始定位、坐标调整、数据记录、停止记录等功能键,并带有实时显示具体移动标签号、实时定位位置以及刷新时间的位置信息实时显示窗口,具体如图4所示。
其中菜单栏中的导入地图,可以选择PC端的本地地图(JPG、PNG等图片格式均可);启动联网用于建立上位机软件与移动节点之间的关联,需要注意的是,PC端的Wi-Fi与室内Wi-Fi移动节点或被追踪人手机终端连接的应该是同一频段内的Wi-Fi信号;在参数和坐标等均设定完或匹配好之后,即可点击“开始定位”,左上角信息框会显示具体的实时位置信息;由于起始阶段参考节点位置与所导入地图的比例尺不一致,需要通过点击“坐标调整”来调整参考节点的位置,使得软件显示的参考节点位置与实际环境中铺设的参考节点位置大体一致;点击“数据记录”会将对应的位置信息、信号强度、测距信息等以文档的形式持续保存在本地PC端,点击“数据记录”后,会跳出保存路径选择,用户可自主选择保存路径,确定保存路径后,“数据记录”按键会变暗,而“停止记录”按键会亮显,待用户点击“停止记录”后,即停止记录并保存记录,同时“数据记录”按键亮显。
3.2 节点硬件设备实现
节点硬件设备包括参考节点和移动节点,两者功能一致,所以采用的是同一套硬件方案,即采用TI公司CC3200型号的Wi-Fi模块,搭建外围电路,实现基于RSSI的低功耗室内定位,电路图如图5所示。
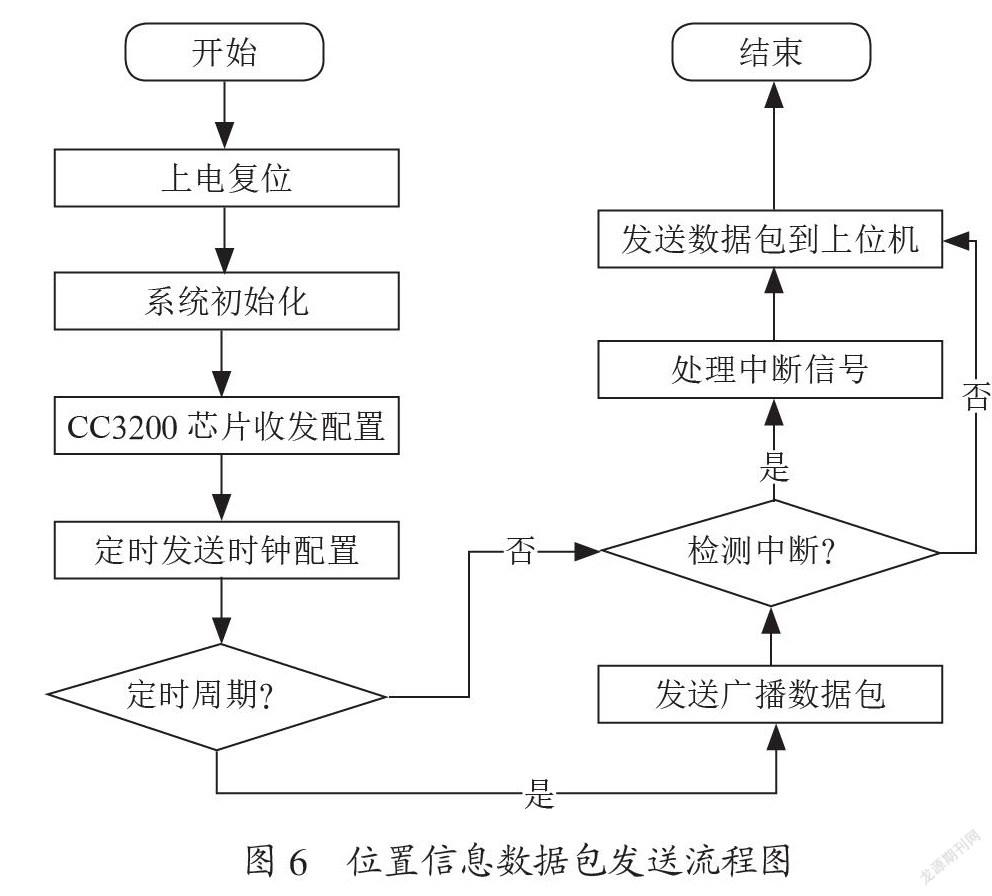
节点硬件设备与上位机软件的交互,通过同一频段的Wi-Fi信号发送广播,测试网络是否中断,若没有中断,则表示网络正常,将底层数据包发送给上位机软件进行处理,对应的数据发送流程图如图6所示。
4 系统测试结果展示
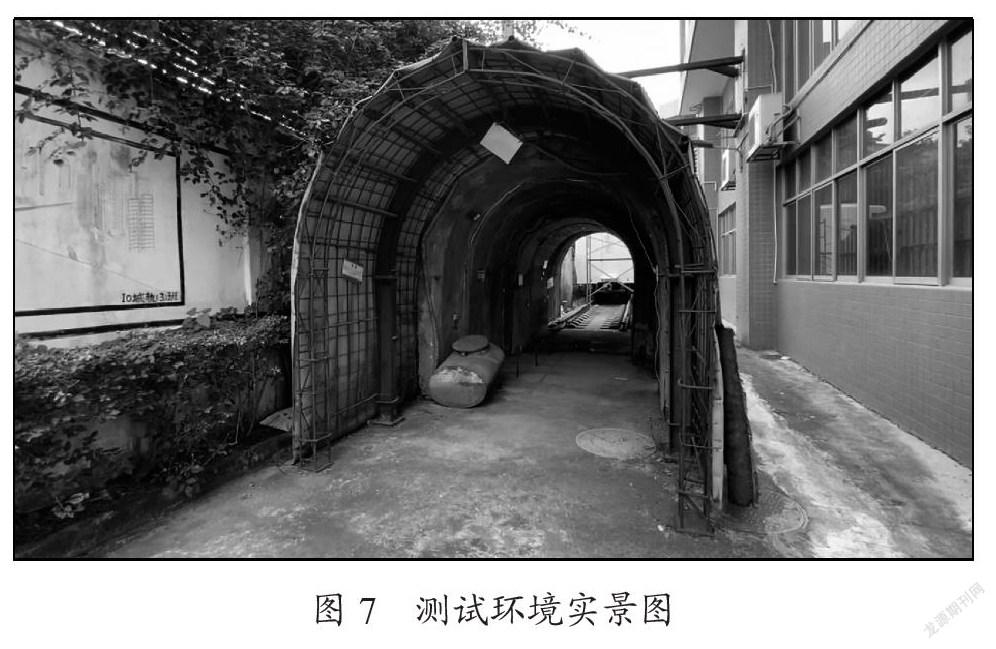
系统测试环境选择校园一条半封闭的隧道内,实景如图7所示。为便于收集数据,用嵌入移动节点带摄像头的遥控智能小车模拟隧道内的移动物体,实物如图8所示。PC端上位机软件实时显示定位信息,如图9所示,其中蓝色圆点表示固定不变的参考节点位置,红色圆点则是智能小车移动过程中的实时位置显示。
在具体的测试中,首先固定4个参考节点的位置,然后根据参考节点人工标记6个已知坐标的点,接着控制智能小车到达标记位置,最后将从PC端获取的定位数据与人工实测数据进行对比,以此检验定位精度的提升效果。具体标记位置如图10所示,实验数据如表3所示。
由上述实验测试数据分析可知,本文方法在上述隧道空旷环境中的定位误差均保持在1.2米以内,达到某些应用场景的定位精度要求,并具有较强的稳定性,这也充分说明本方法在室内定位中的可行性和有效性,基本达到预期效果。另外,需要说明的是,室内硬件设备的布局会影响Wi-Fi收发信号强度,进而影响实时定位算法的效果。本试验的结果是根据实际环境,经过多次测试调整参数,获得与实际环境相匹配的最优布局的结果。
5 结 论
本文在室内人员定位追踪系统的具体应用实践探索中,通过对现有室内定位技术的分析比较,选择应用前景广阔的Wi-Fi室内定位技术,在比较多种基于RSSI的位置指纹算法后,选取其中的WKNN算法,引入卡尔曼滤波对其进行优化,设计并实现了室内定位的软硬件系统。选取特定场景进行测试,测试结果表明本文方法可提升定位精度与定位稳定性,为基于Wi-Fi的室内定位的应用与研究提供了参考思路。但综合来看,本文方法仍存在较大的局限性,欠缺各种复杂场景下的研究与测试,此场景下的定位效果仍有待进一步的改进与优化。
参考文献:
[1] 徐军,李群群,王曰辉,等.室内移动目标定位系统设计 [J].电子技术应用,2018,44(12):44-46+50.
[2] SOU S L,LIN W H,LAN K C,et al. Indoor Location Learning Over Wireless Fingerprinting System With Particle Markov Chain Model [J].IEEE Access,2019,7:8713-8725.
[3] GAO C Q,ZHANG Y Z,WANG X Z,et al. Semi-direct RGB-D SLAM algorithm for dynamic indoor environments [J].ROBOT,2019,41(3):372-383.
[4] 李兵兵.基于WiFi位置指紋的室内定位算法研究 [D].保定:河北大学,2020.
[5] 朱正伟,蒋威,张贵玲,等.基于RSSI的室内WiFi定位算法 [J].计算机工程与设计,2020,41(10):2958-2962.
[6] 余成波,成科宏.WiFi与行人航迹推算自适应无迹卡尔曼滤波融合定位算法 [J].科学技术与工程,2020,20(27):11155-11160.
[7] 米伟娟.基于WiFi的室内定位系统的设计与实现 [D].石家庄:河北科技大学,2019.
[8] 李梦梦.基于机器学习的WiFi室内定位技术研究 [D].西安:西安科技大学,2020.
[9] 徐锦修,仲臣,韩雨辰,等.改进的WKNN算法研究 [J].科技创新与应用,2021,11(19):19-21+25.
[10] 王修驹,姚善化.基于改进WKNN的室内定位算法 [J].齐齐哈尔大学学报(自然科学版),2021,37(3):12-16+21.
作者简介:曾光(1990—),男,汉族,广东河源人,讲师,工程师,硕士研究生,研究方向:电子信息、机器视觉;丁宇凌(2001—),女,汉族,广东潮州人,研究方向:通信信号技术;黄健盛(2002—),男,汉族,广东汕头人,研究方向:通信信号技术;黄杨灵(2001—),男,汉族,广东茂名人,研究方向:通信信号技术。
猜你喜欢
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
软件(2016年4期)2017-01-20
电脑知识与技术(2016年27期)2016-12-15
电脑知识与技术(2016年25期)2016-11-16
软件导刊(2016年9期)2016-11-07
电脑知识与技术(2016年21期)2016-10-18
科技视界(2016年14期)2016-06-08
电脑知识与技术(2016年2期)2016-03-22
光学仪器(2015年1期)2015-07-30