
A Smart Wearable Ring Device for Sensing Hand Tremor of Parkinson’s Patients
2021-04-28 05:03HaixiaYangYixianShenWeiZhuangChunmingGaoDongDaiandWeigongZhang
Haixia Yang,Yixian Shen,Wei Zhuang,Chunming Gao,Dong Dai and Weigong Zhang,*
1School of Instrument Science and Engineering,Southeast University,Nanjing,210096,China
2School of Computer and Software,Nanjing University of Information Science and Technology,Nanjing,210044,China
3School of Engineering and Technology,University of Washington,Tacoma,98402,USA
4School of Cyber Science and Engineering,Southeast University,Nanjing,210096,China
ABSTRACT Parkinson’s disease(PD)is a very common neurodegenerative disease that occurs mostly in the elderly.There are many main clinical manifestations of PD,such as tremor,bradykinesia,muscle rigidity,etc.Based on the current research on PD,the accurate and convenient detection of early symptoms is the key to detect PD.With the development of microelectronic and sensor technology,it is much easier to measure the barely noticeable tremor in just one hand for the early detection of Parkinson’s disease.In this paper,we present a smart wearable device for detecting hand tremor,in which MPU6050(MIDI Processing Unit)consisting of a 3-axis gyroscope and a 3-axis accelerometer is used to collect acceleration and angular velocity of fingers.By analyzing the time of specific finger movements,we successfully recognized the tremor signals with high accuracy.Meanwhile,with Bluetooth 4.0(Bluetooth Low Energy,BLE)and networking terminal ability,tremor data can be transferred to a monitoring device in real time with extremely low energy consumption.The experimental results have shown that the proposed device(smart ring)is convenient for long-term tremor detection which is vital for early detection and treatment for Parkinson’s disease.
KEYWORDS Parkinson’s disease;tremor detection;IMU sensor;MPU6050;BLE
1 Introduction
Parkinson’s disease(PD)is a progressive nervous system disorder that affects movements of human body.Symptoms start gradually,sometimes starting with a barely noticeable tremor in just one hand.Tremors are common,but the disorder usually causes stiffness or bradykinesia[1].The elderly is at a higher risk of Parkinson’s disease compared with young people which causes great difficulties to their life.
Tremor,especially static tremor,is usually the first symptom of Parkinson’s disease.The“static” refers to a state of quietness or relaxation of muscles of the body.These tremors look like as if a person is rubbing clay balls or counting money.They appear only occasionally at first,and get worse gradually.
The main symptoms of Parkinson’s disease are distinguishable,especially the tremors which serve as the prelude and can be used to foresee an onslaught of Parkinson’s disease[2–4].In recent decades,the detection of tremor signals of Parkinson’s disease has attracted enthusiastic attentions and many detection methods have been proposed in academia and industry[5–7].
Devices with builtin accelerometers and gyroscopes have been used to assist detecting tremors in PD patients.The study of using accelerometer to detect tremor signals is evolved gradually with the development of electronic techniques[8,9].In 2010,in the United States,Robert LeMoyne used builtin accelerometer in iPhone to detect tremor signals.By collecting and analyzing the waveform of tremors from a Parkinson’s patient,it is demonstrated that the accelerometer in iPhone can quantify the characteristics of tremor[10].Oess et al.[11]designed a smart glove equipped with gyroscope which can trace the motion of hand and analyze the motion waveform to detect tremor.Paola Pierlenoni designed a bracelet which is used to detect tremor signal;it uses the FFT(Fast Fourier Transform)and autoregressive parameter model spectrum to plot the power spectrum and identifies the features of tremor[12].Butson et al.[13]proposed a standardized method to classify motions based on motion programming DBS(Deep Brain Stimulation)parameters.In their study,subjects were asked to wear motion sensors while conducting DBS coded standard procedures to collect kinematics data.Researchers could use this method to better understand the parameters of motions.
So far,it is a common belief that tremor signals embrace reliable characteristics for early detection of Parkinson’s disease[14,15].However,it remains a challenge about how to make the detection accurate and how to make the device easy to use for the elderly users.Researches are working to develop smaller and more convenient devices for tremor detection[16].In the future,it is inevitable that there will be more demands on small and convenient devices for PD’s early detection.
In general,wearable devices[17–19]for PD detection have the following features in common:
(1)Small size and light weight,so that the device can be used as convenient as possible.
(2)High sensitivity.The device should be able to detect subtle tremors which can prelude the onslaught of PD.
(3)Low power consumption.The battery capacity of microelectronic device is extremely limited.As a result,the operating power should be as low as possible.
In this paper,we present our design and implementation of a small ring device to detect hand tremors for Parkinson’s disease patients.Section 2 presents our selection of the system hardware components and Section 3 presents the hardware circuit design.Section 4 explains the tremor detection algorithm design.Section 5 presents our system implementation and the experimental studies.In Section 6,we conclude with future work to fine-tune the smart ring device.
2 System Hardware Architecture
2.1 Off-the-Shelf Hardware List
To minimize the size and cost of the device,we selected off-the-shelf hardware as listed in Tab.1 and explained below.
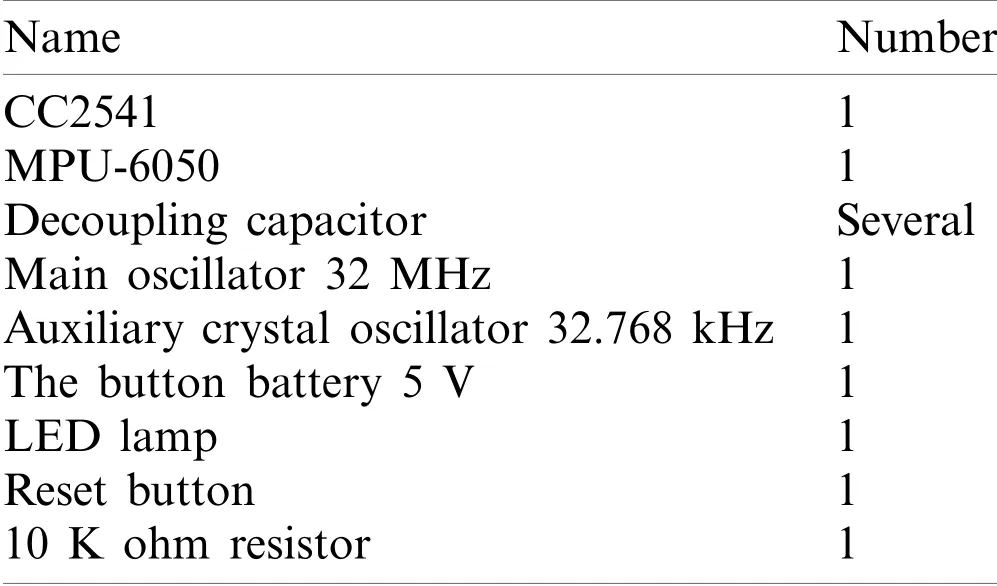
Table 1:List of hardware materials
CC2541 is a Bluetooth low energy and proprietary wireless MCU(Microcontroller),used for data transmission.MPU-6050(MIDI Processing Unit)is a motion tracking device designed for low power consumption,low cost and high-performance,used to obtain data of acceleration and angular velocity.Decoupling capacitor is used for signal filtering.Precision resistor(56 kohm,±1%)is a bias resistor.Main crystal oscillator(32 MHz)is to supply clock signals.Auxiliary crystal oscillator(32.768 kHz)works for low power consumption mode.The button battery(5 V)supplies power.LED lamp is used to indicate the state of device.Reset button is used to reset the device.10 KΩresistor is used to protect the circuit.
2.2 MPU-6050
2.2.1 A Brief Introduction of MPU-6050
MPU6050 is an integrated chip with embedded accelerometer and gyroscope on the same silicon die that can detect acceleration,angular velocity and temperature.We only use acceleration and angular velocity in this study.The data collected were converted from analog signals to digital signals using a 16-bit ADC(Analog-to-Digital Converter).The integrated gyro detection diagram is shown in Fig.1.The pin diagram of MPU-6050 is shown in Fig.2.
2.2.2 Configuring Register Parameters
GYRO_CONFIG:XG_ST(self-testing X-axis gyroscope),YG_ST(self-testing Y-axis gyroscope),G_ST(self-testing Z-axis gyroscope)and FS_SEL(gyroscope range selection)are included in this register configuration part.When FS_SEL is 0,the output range is ±250◦/s.When FS_SEL is 1,the output range is ±500◦/s.When FS_SEL is 2,the output range is ±1000◦/s.When FS_SEL is 3,the output range is ±2000◦/s.
ACCEL_CONFIG:XA_ST(self-testing X-axis accelerometer),YA_ST(self-testing Y-axis accelerometer),ZA_ST(self-testing Z-axis accelerometer)and AFS_SEL(accelerometer range selection)are included in this register configuration part.The accelerometer configuration is shown in Tab.2.
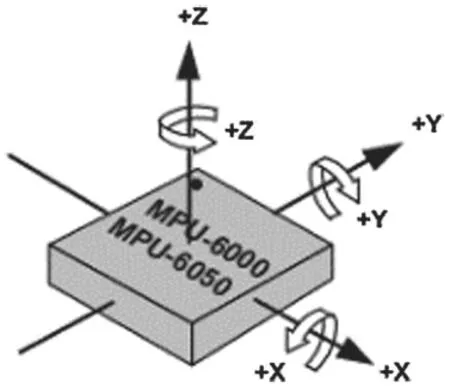
Figure 1:Gyro detection diagram
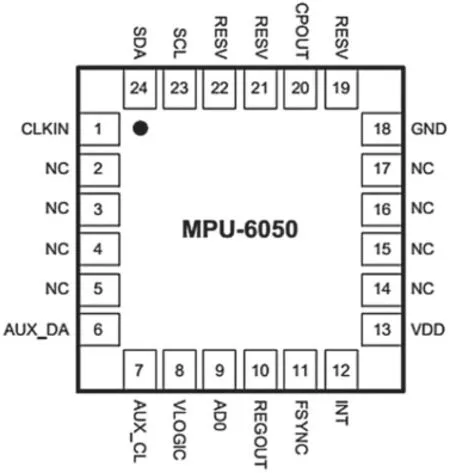
Figure 2:Pin diagram of MPU6050
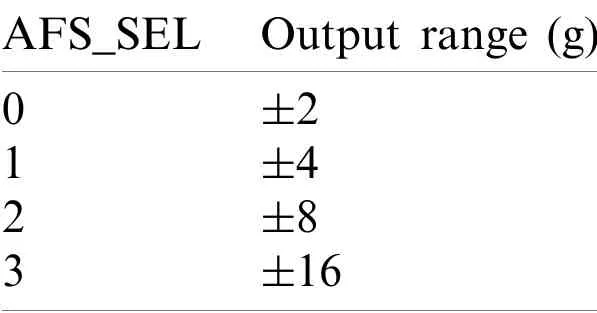
Table 2:Accelerometer configuration
The registers used to store the triaxial acceleration values are:ACCEL_XOUT_H,ACCEL_XOUT_L,ACCEL_YOUT_H,ACCEL_YOUT_L,ACCEL_ZOUT_H,ACCEL_ZOUT_L.
The registers used to store the value of gyroscope:GYRO_XOUT_H,GYRO_XOUT_L,GYRO_YOUT_H,GYRO_YOUT_L,GYRO_ZOUT_H,GYRO_ZOUT_L.
2.2.3 Interrupt Mode
The interrupt status register can read interrupt status in MPU-6050.The main interrupt sources are Free Fall Interrupt,Motion Interrupt,and Zero Motion Interrupt.
Free Fall Interrupt:The free fall is judged by comparing the magnitude of triaxial acceleration with the threshold value.If the acceleration is close to the threshold value,it triggers the free fall interrupt and change the flag bit.If the acceleration is less than the threshold,it is ignored.
Motion Interrupt:If the output value is greater than the threshold value,the counter increases by 1.Otherwise,the counter decreases by 1.When the value of counter reaches the threshold value,the motion interrupt will be triggered.When the flag bit is read,both free fall and motion interrupt become 0.
Zero Motion Interrupt:If the output value is smaller than the threshold value,the counter will increase by 1.When the value of counter reaches the threshold value,the static interrupt is triggered.
Interrupts can be triggered by the following events:Switching clock source,completing the DMP(Digital Motion Processor),reading data from FIFO(First-In,First-Out)data register and interrupt accelerometer.
2.2.4 CC2541 Communication
In addition to the IIC interface connected to MPU6050,CC2541 also has two powerful asynchronous serial communication interfaces that support multiple serial protocols:USART0 and USART1.These two interfaces can not only run asynchronous UART mode but also run synchronous SPI mode.
The operation characteristics of UART mode are as follows:1)Three calibration methods are applicable,namely odd parity,even parity and no parity.2)Receive interrupts autonomously.3)Access memory autonomously.4)Check the error state through the checksum frame.
UART has two interface selection methods:2-wire interface(using RXD and TXD),4-wire interface(using RXD,TXD,RTS and CTS).In USART0,P0_2 corresponds to RX,P0_3 to TX,P1_4 to RX,and P1_5 to TX.In USART1,P0_5 corresponds to RX,P0_4 to TX,P1_7 to RX,and P1_6 to TX.
The UART operations mainly include UxCSR and UxUCR(x is 0 or 1,which is the USART number).Now take USART0 for example.U0CSR.MODE is used to set UART MODE.When U0CSR.RE is 0,the receiver is disabled.When U0CSR.RE is 1,the receiver is enabled.When U0CSR.FE is 0,it means no frame error detection.
When U0CSR.FE is 1,it means the byte has received incorrect stop bit level.When U0CSR.ERR is 0,there is no parity error.When U0CSR.ERR is 1,there is parity error.U0CSR.RX_BYTE is 0 when no bytes are received.When U0CSR.RX_BYTE is 1,it is ready to receive bytes.When U0CSR.TX_BYTE is 0,the byte is not sent.When U0CSR.TX_BYTE is 1,the byte is written to the cache and the byte will be sent at last.When U0CSR.ACTIVE is 0,USART is idle.When U0CSR.ACTIVE is 1,USART is busy when sending or receiving.The table USART 0 UART Control-U0UCR(0xC4)is in Tab.3.
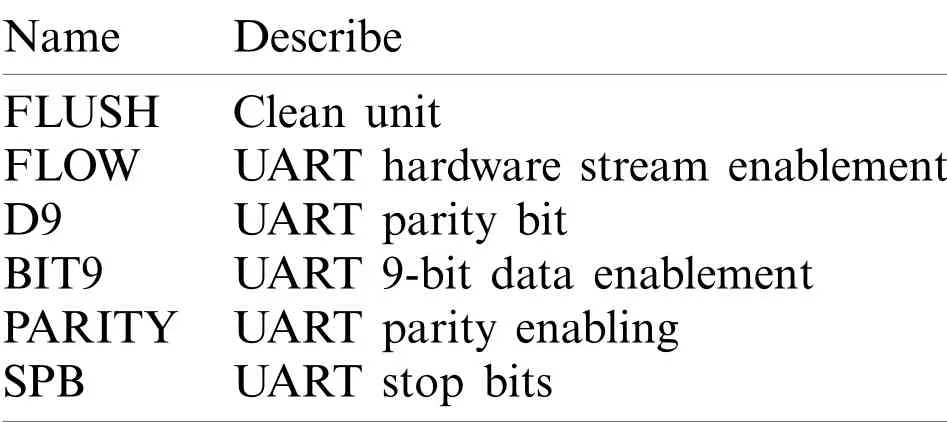
Table 3:USART 0 UART control-U0UCR(0xC4)
3 Hardware Circuit Design
3.1 Overall Design Scheme and Circuit Diagram Analysis
In this study,CC2541 is the main chip and MPU6050 is the data collection module which are to be integrated as a smart ring.Fig.3 shows the overall scheme diagram.The smart ring includes the sensor module,power supply,and the Bluetooth transmission unit.APP is developed as a smartphone application to display the data.Fig.4 shows the circuit of CC2541 module.
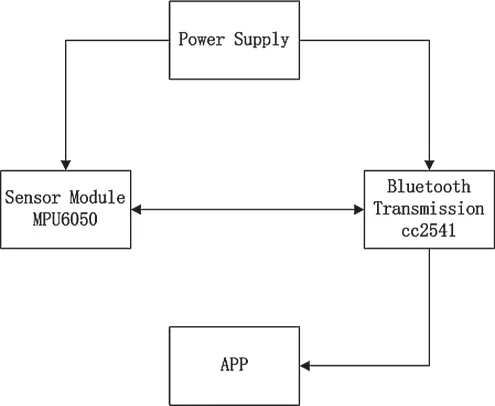
Figure 3:Overall scheme diagram
3.2 Design of CC2541 Reset Circuit
CC2541 RESET pin can reset CC2541.The reset function will initialize the system to the original state when all registers are cleared.In this design,the reset button is used for future development.Fig.5 is the reset button circuit.
Under normal conditions,the key will always be in a disconnected state,and the RESET pin will always be in a low-level state.When the key is pressed,RESET is directly connected to the power supply.At this time,RESET is 1 and the starts to reset.Of course,C and R determine the duration of the high level.The advantage of button reset is that it can be reset at any time.But there are also disadvantages.For instance,the operation is more complex and welding is more difficult.
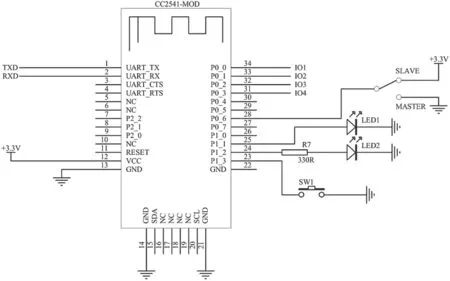
Figure 4:Circuit of CC2541 bluetooth module
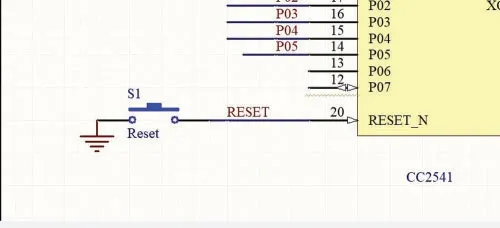
Figure 5:Reset button circuit
3.3 Crystal Oscillator Circuit Design of CC2541
Considering the low power consumption,a primary and a secondary crystal oscillator are added according to the user manual of CC2541.The main crystal oscillator is connected to the circuit of 22 and 23 pins.Fig.6 shows the crystal oscillator circuit.
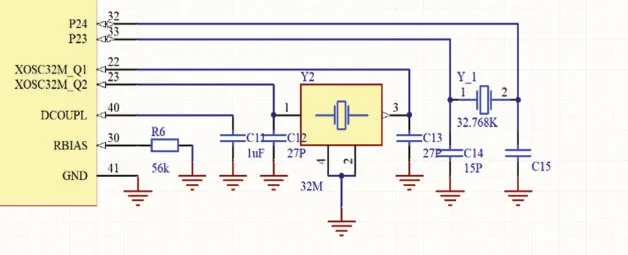
Figure 6:Crystal oscillator circuit
The reason why the RC internal oscillator of 16 MHz is not used is that it has low accuracy which cannot be used in RF transceivers.The main frequency of auxiliary crystal oscillator is 32.768 KHz according to the manual,which is added to achieve low power consumption.In general,the crystal oscillator is matched with capacitors.The main crystal oscillator and the auxiliary crystal oscillator have two capacitors respectively according to the manual,which can effectively assist the crystal to vibrate and improve the stability of the circuit.
3.4 CC2541 RF Circuit and Antenna Design
The 25 and 26 pins of CC2541 are RF pins,and a 50 ohms impedance is the best match for RF communication according to the manual.Therefore,a device named 2450BM15A0002 of balun is used in this design.Considering the ceramic antenna is smaller than traditional PCB antenna,ceramic antenna is selected.Fig.7 is the RF circuit and antenna.
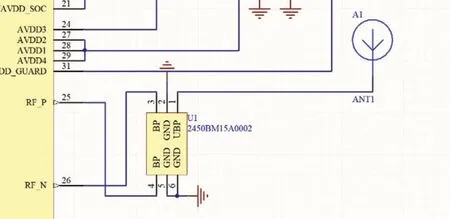
Figure 7:RF circuit and antenna
CC2541 and MPU6050 have SCL pin,SDA pin and IIC interface,which can receive and send data.NFC is used for communication between CC2541 and MPU6050.MPU6050 transmits the collected data to CC2541 using the two pins,and then the data will be transmitted to the mobile terminal using the Bluetooth module.
3.5 Power Circuit Design
Since 5 V is the reference voltage,the voltage stabilizing circuit Lm1117 is used.The advantage of LM1117 is the high voltage stability,accuracy,small temperature drift at high and low temperature and simple peripheral circuit.The output current can reach 0.8 A with 0.2% voltage stability and 0.4% load stability.A light emitting diode is added to the far right to indicate whether it is working to prevent the battery from connecting backwards.Fig.8 shows the power supply circuit.

Figure 8:Power supply circuit
3.6 Hardware Overall Analysis
This design uses a CC2541 chip,which has low power consumption.The current is only 0.5 mA in external interrupt mode.In order to meet the requirements of low power consumption,32.768 kHz auxiliary crystal oscillator is used.
4 Tremor Detection Algorithm Design
4.1 Main Flow of System
After calling the main function,the system will enter the initial state,and then continuously send the current state of the device in the while loop.The program flow diagram is shown in Fig.9.
4.2 Internal Drive Function Flow of MPU6050
After calling the MPU6050 drive function,it then tests readability of the data collected by MPU6050 and the stability of connection.It then sends all data of the triaxial acceleration and angular velocity to CC2541 by NFC.The flow diagram is shown in Fig.10.
4.3 Inertial Data Collection
4.3.1 Initialize and Test the Connection Fragment
The algorithm for collecting inertial data is shown in Fig.11.
At first,IIC is initialized and bIfConnected is set with a flag ahead of time.If AD0 of MPU6050 is in low level,then the connection is successful.And then assign a value of 1 to bIfConnected and initialize MPU6050.
Using a for loop,all the data in the IIC device are read and stored in the array for invocation.Where Slave Address is the device address,REG_Address is the device’s internal register address,readNum is the maximum number of internal registers,and I2CSlaveBuffer[PORT_USED][i]is the array to be sent.
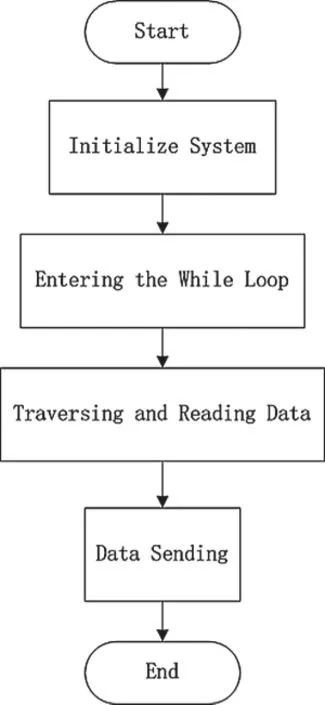
Figure 9:System flow design
The variables ax,ay,az receive the unprocessed triaxial acceleration data from registers and gx,gy,gz receive the unprocessed triaxial angular velocity data from the correspondent registers.These data will be continuously passed to the DMP motion chip for further processing and then being transmitted to the mobile client by the Bluetooth module.
The data packet of the communication protocol usually has 20 bytes,including header(1 byte),effective data length(1 byte),function code(1 byte),effective data(0–16 bytes),checksum(1 byte,the sum of data before the checksum in the package),and complement byte(0–16 bytes).Firstly,check the following packet head to see whether it is 0×55.If so,continue the following operation and analyze whether the packet head of the transmitted packet is 0×52 or 0×51 respectively.If it is 0×51,it indicates that the packet is an acceleration packet.Otherwise,it is an angular velocity packet.
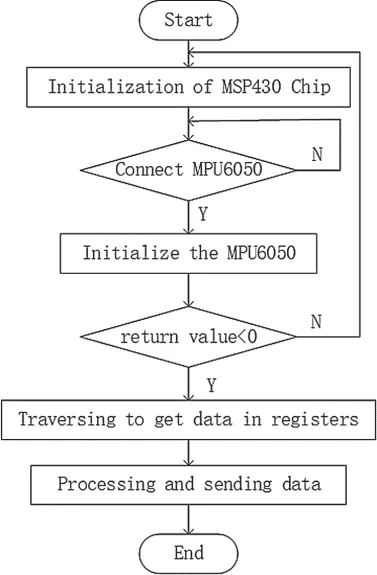
Figure 10:Internal flow diagram
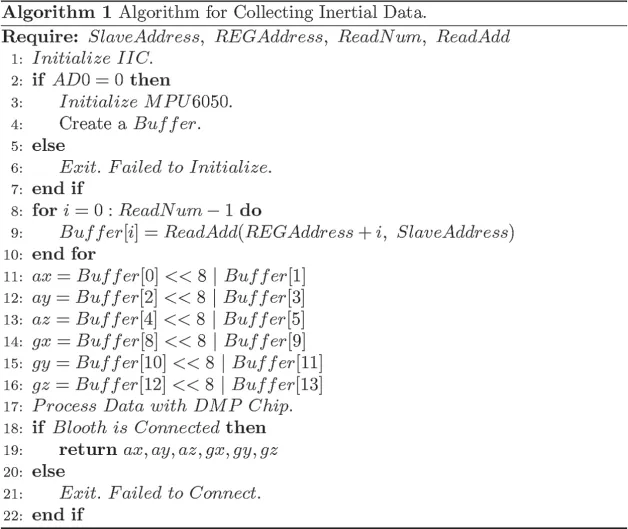
Figure 11:Algorithm for collecting inertial data
5 System Experiments and Results
5.1 APP Design Test
An smartphone application is designed as shown in Fig.12.In this interface,x,y and z in the diagram are displayed for acceleration and angular velocity.In the test process,click the“Select Bluetooth”button to select the corresponding Bluetooth.At this time,each axial waveform will be displayed on the screen,and the data will be saved into two files in the system with file extension “.txt”,with “ble6050a.txt” storing acceleration data,and “ble6050b.txt” storing angular velocity data.
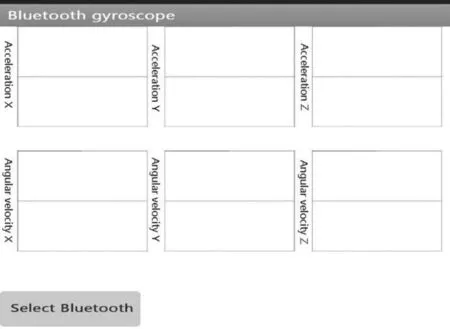
Figure 12:APP page
5.2 Prototype of the Ring Device
The smart ring implemented in this study uses a plastic platform,which does not produce much interference compared with using metal material.The Printed Circuit Board(PCB)contains a switch,MPU6050,CC2541.When the switch is open,a LED lamp will light up to indicate that the device is running.Fig.13 shows the prototype and the PCB diagram.
5.3 Experiments and Results Analysis
5.3.1 Measuring the Intensity of Finger Tremor
In our experiment,hand tremor is simulated by healthy people using protocols based on the study as described in the research background.Three tests are conducted in this study.All participants wear the ring device in their fingers(see Fig.14).
Sample 1:The tested person stays static.
Sample 2:The tested person walks normally.
Sample 3:The tested person simulates the tremor.
During the test,we transmitted the data to the mobile APP according to the operation instructions and selected sample screenshots as shown in the figures.Fig.15 shows the waveform of three axis acceleration and angular velocity of Sample 1.Fig.16 shows the waveform of Sample 2.Fig.17 shows the waveform of Sample 3.
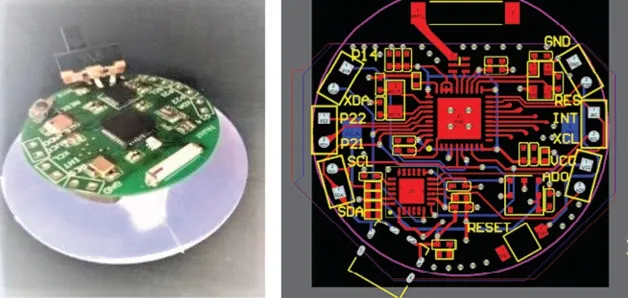
Figure 13:Prototype and PCB diagram

Figure 14:Wearing device on one finger
Tabs.4–9 present the raw data of the three samples of the experiments,and Tabs.10–12 present the processed data,where acceleration of three-axis is processed by numerical value/32768×16 g(where g is the acceleration of gravity and taken as 9.8 m/s2),and angular velocity of three-axis is processed by numerical value/32768×2000(◦/s).
Tab.4 shows the acceleration raw data of Sample 1.
Tab.5 shows the angular velocity raw data of Sample 1.
Tab.6 shows the acceleration raw data of Sample 2.
Tab.7 shows the velocity raw data of Sample 2.
Tab.8 shows the acceleration raw data of Sample 3.
Tab.9 shows the angular velocity raw data of Sample 3.
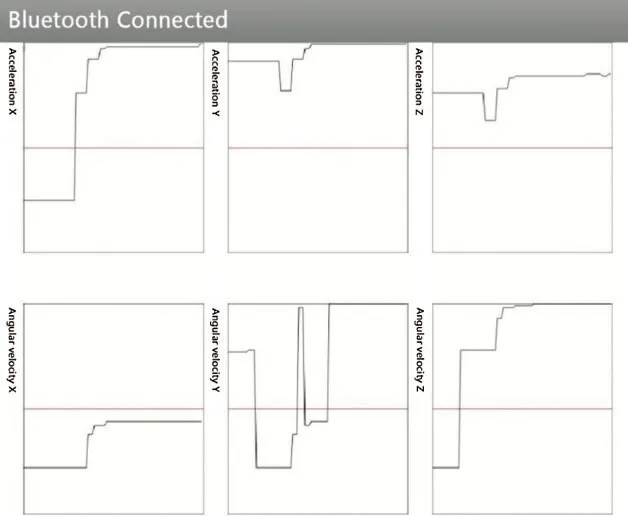
Figure 15:Waveform of three axis acceleration and angular velocity of Sample 1
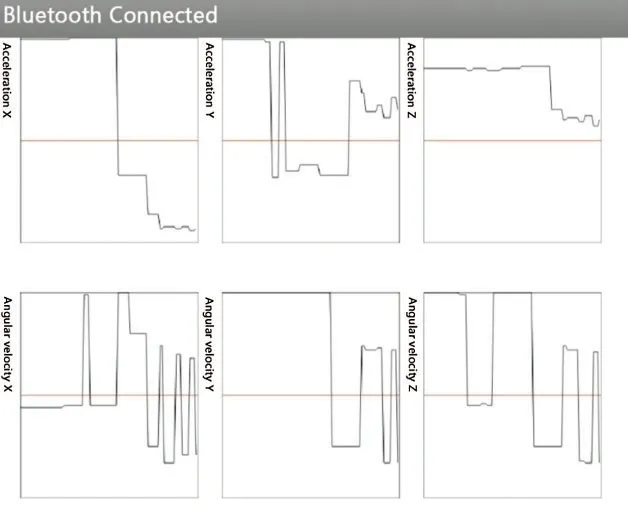
Figure 16:Waveform of three axis acceleration and angular velocity of Sample 2
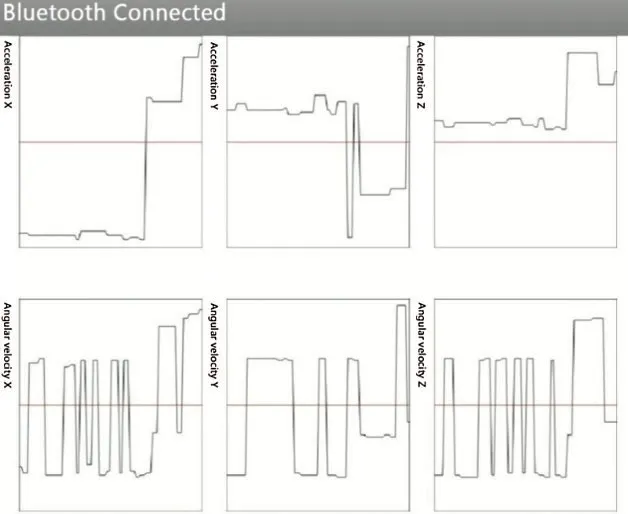
Figure 17:Waveform of three axis acceleration and angular velocity of Sample 3
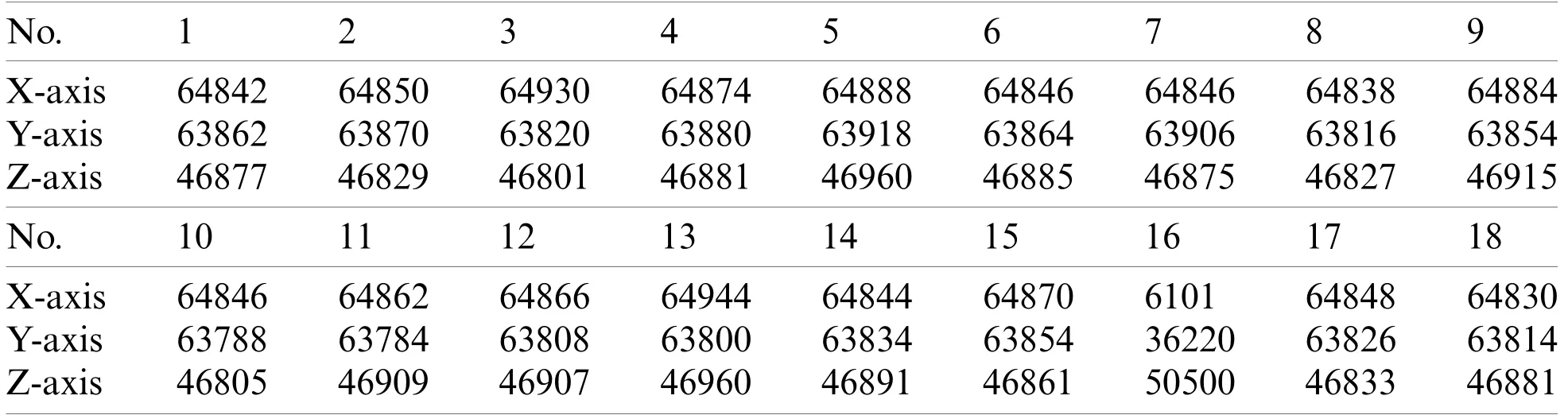
Table 4:Acceleration raw data of Sample 1
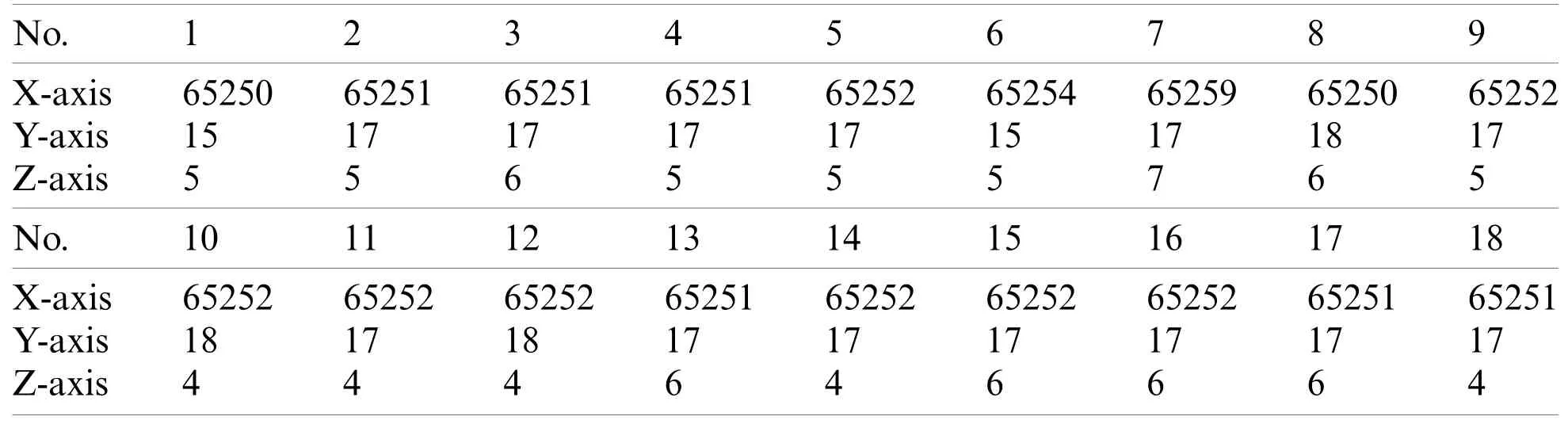
Table 5:Angular velocity raw data of Sample 1
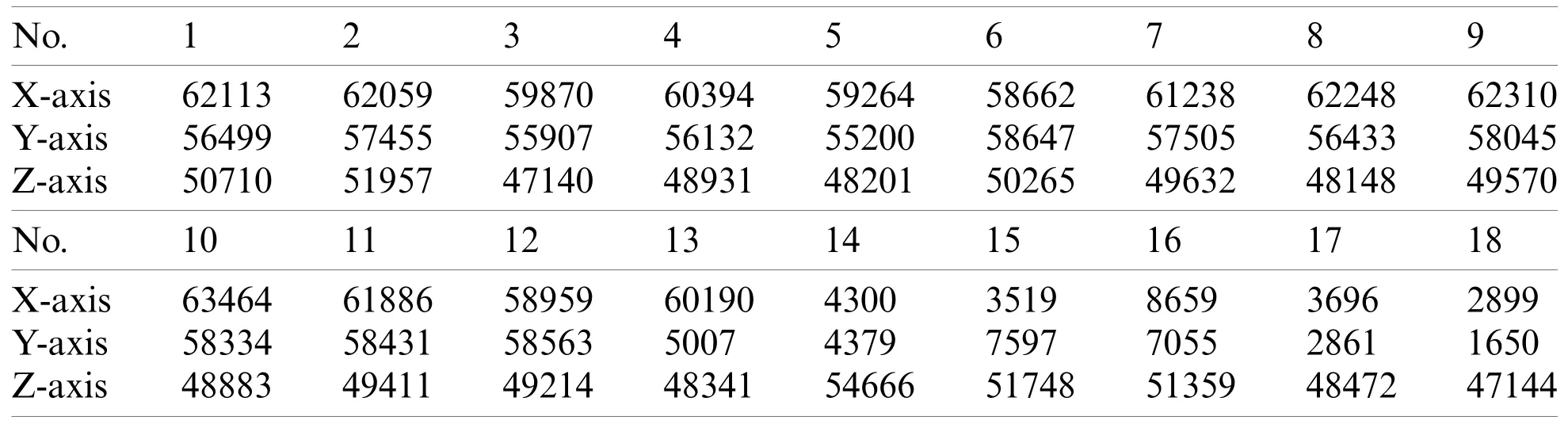
Table 6:Acceleration raw data of Sample 2
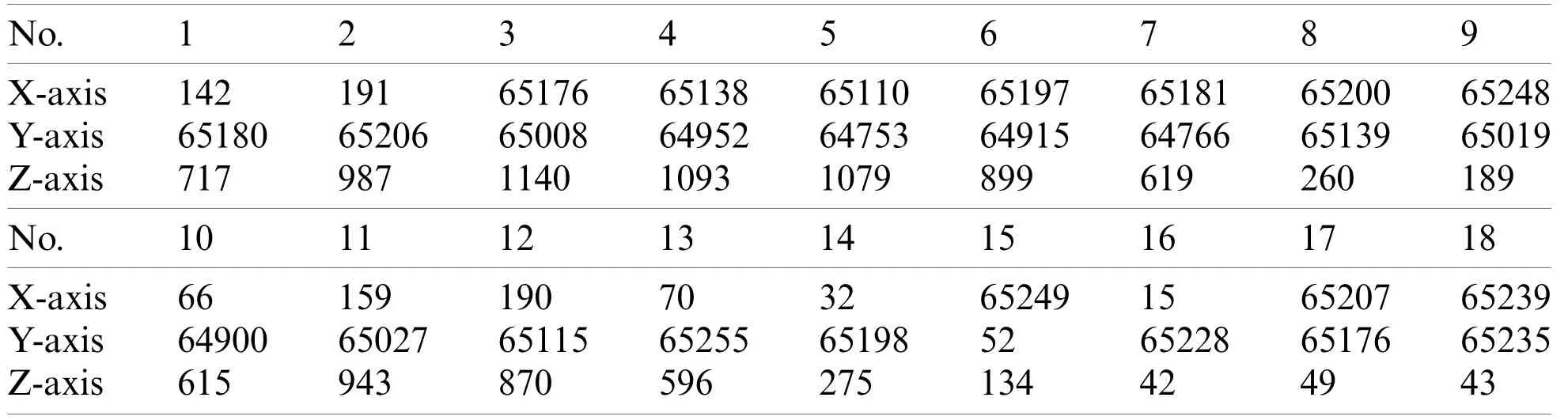
Table 7:Angular velocity raw data of Sample 2
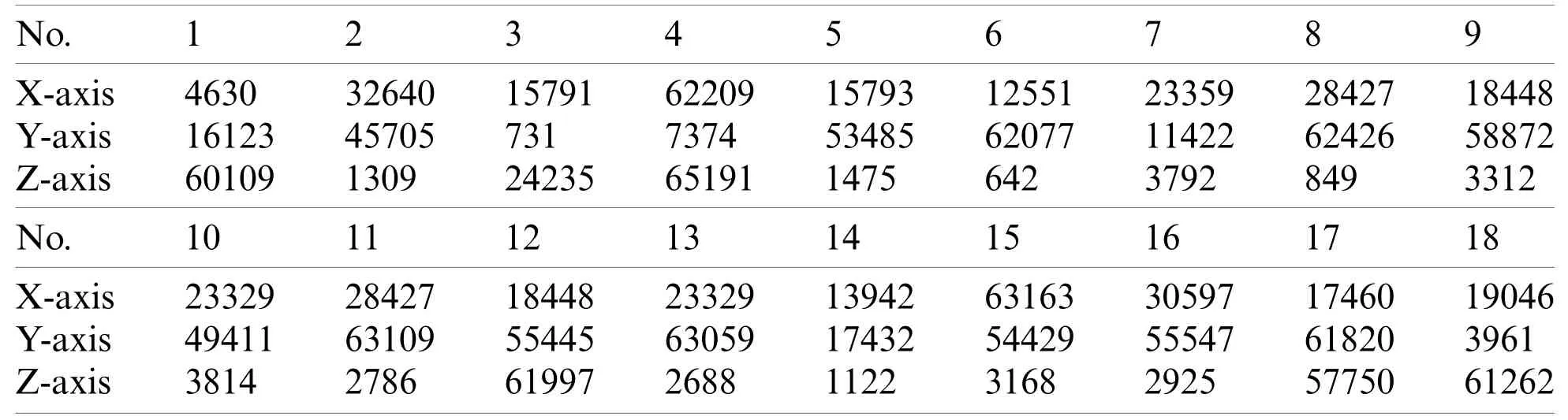
Table 8:Acceleration raw data of Sample 3
Tab.10 shows strength table after Sample 1 treatment.
Tab.11 shows strength table after Sample 2 treatment.
Tab.12 shows strength table after Sample 3 treatment.
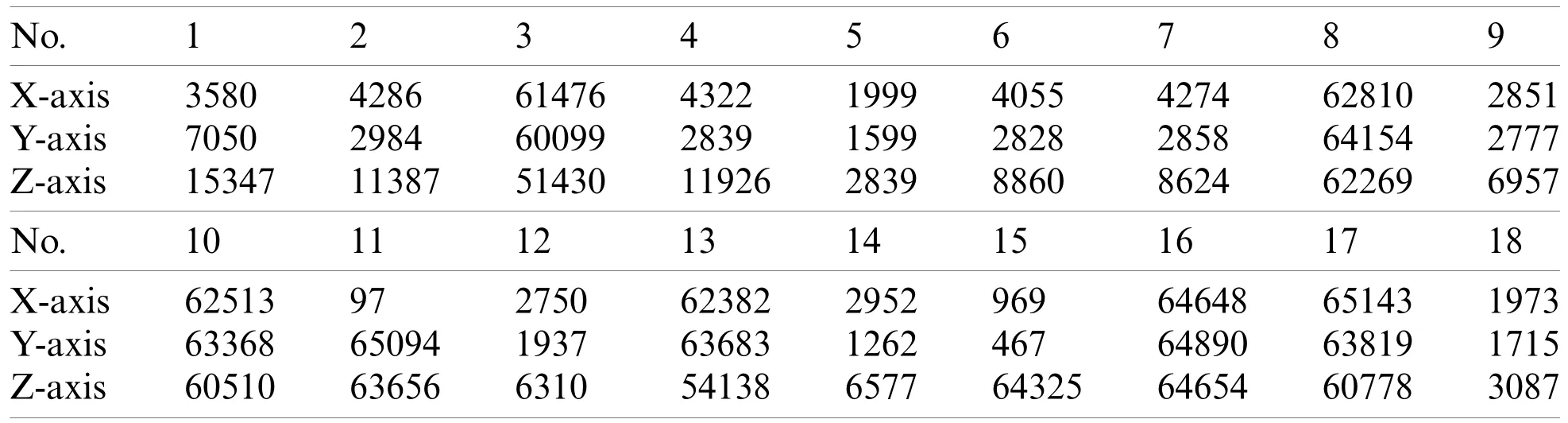
Table 9:Angular velocity raw data of Sample 3
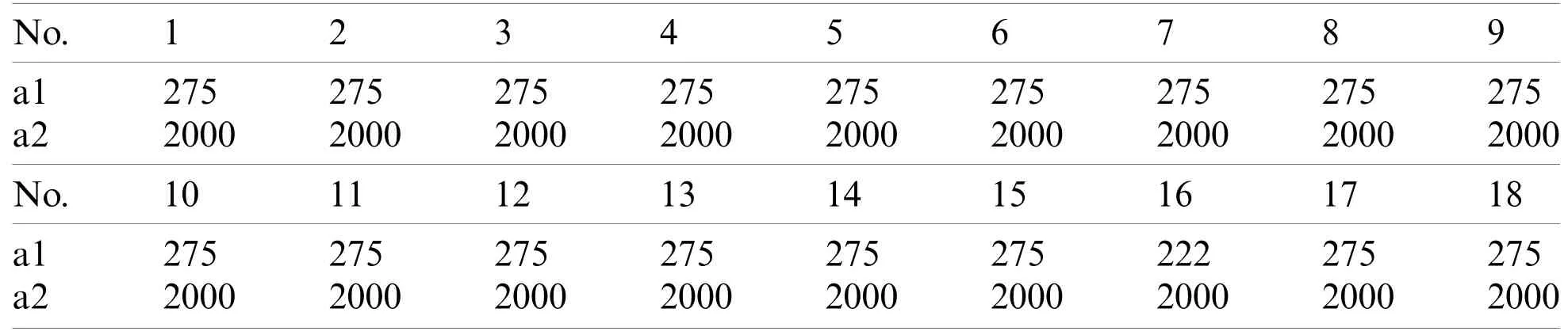
Table 10:Strength table after Sample 1 treatment
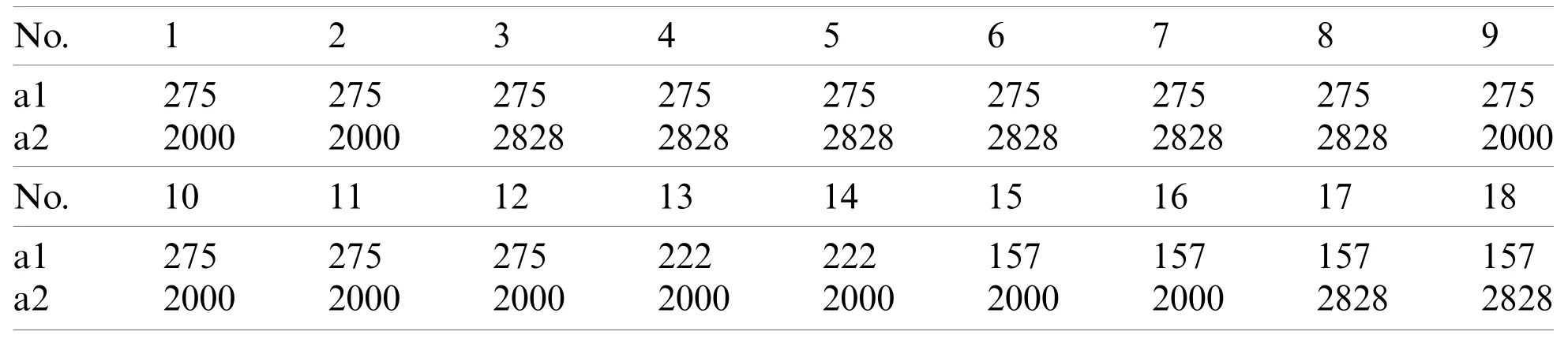
Table 11:Strength table after Sample 2 treatment
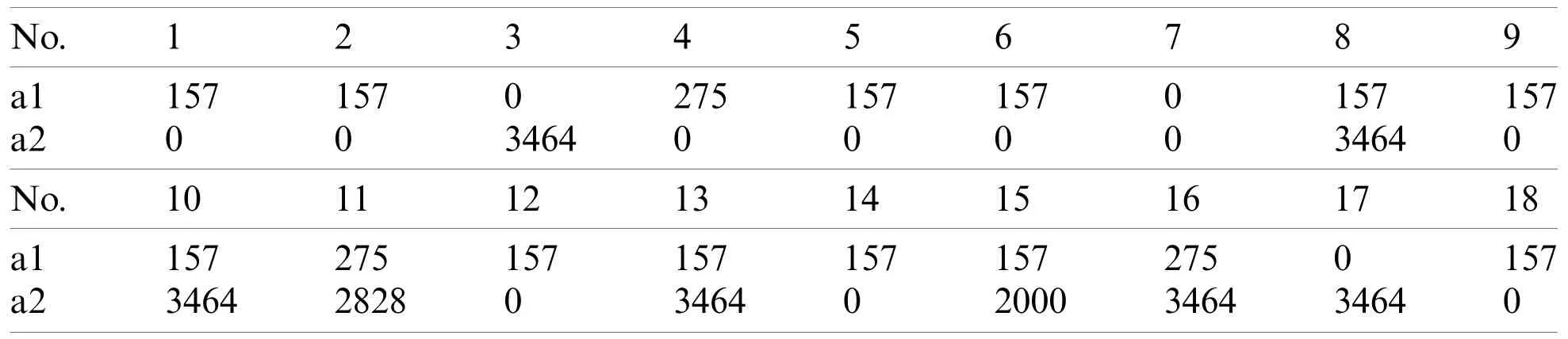
Table 12:Strength table after Sample 3 treatment
Figs.18 and 19 show the intensity comparison of three samples for movements of static state,walking state,and simulated tremor by “counting money.” Examining the waveform of figure and the line graph of the processed intensity values of the acceleration and angular velocity,it can be found that acceleration of Sample 1 is stable at 275 and angular velocity is stable at 2000.The acceleration of Sample 3 fluctuates and so does the angular velocity.
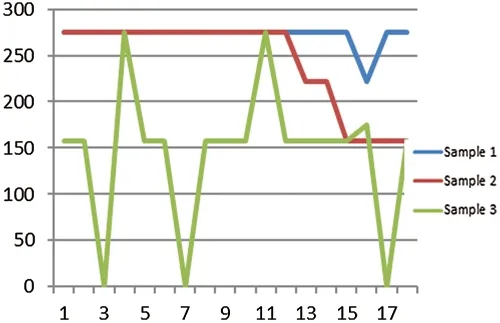
Figure 18:Acceleration intensity comparison diagram
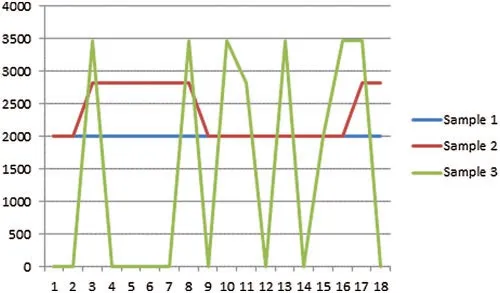
Figure 19:Angular velocity intensity comparison diagram
5.3.2 Determine the Degree of Bradykinesia in Parkinson’s Patients
To assess the severity of PD,the Unified Parkinson’s Disease Rating Scale(UPDRS)is most commonly used.In this experiment,measuring the movement time between the touching of thumb and the index finger is the most important part in order to analyze the symptoms of bradykinesia between Parkinson’s patients and normal people.In the experiment,three participants conducted as healthy people(Participant 1,Participant 2 and Participant 3)and three participants(Participant 4,Participant 5 and Participant 6)simulated PD of UPDRS level 1–3.All these participantss touched the index finger with thumb,and the movement time was measured respectively.
The movement timeTbetween the touching of thumb and the index finger can be calculated using the collected datawhich represent the mutually perpendicular accelerated speed.Eq.(1)is the relationship between resultant acceleration and the three components.


The movement timeTcan be measured by evaluating the periodPof angleθorφusing the Discrete-Time Fourier Transform Eq.(3).The sequence with N samples of angleθcan be denoted asθ[N]when only considering angleθ.

where,ωrepresents the angular velocity ofθ.We then calculate theωwhich makes the |Θ(ω)|to achieve the maximum value.Then,T=P=1/ωwill be the movement time between the touching of thumb and the index finger.
Fig.20 is the maximum finger opening.
Fig.21 is the moderate opening of the finger.
Fig.22 is the two-finger touch diagram.
Tab.13 shows the movement time of each sample and the doctor’s ratings according to UPDRS.
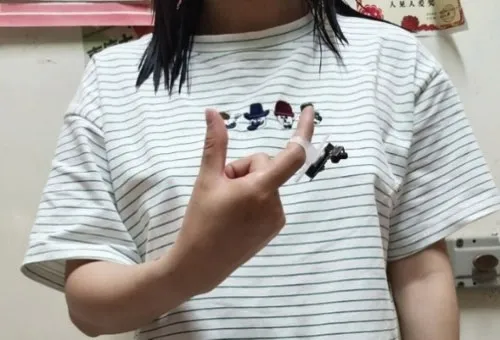
Figure 20:Maximum finger opening
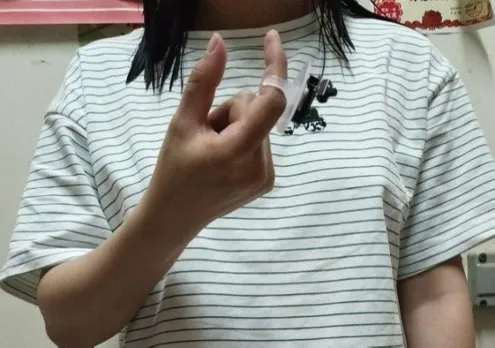
Figure 21:Moderate opening of the finger
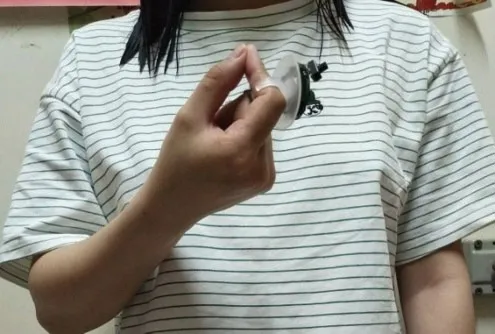
Figure 22:Two-fingers touch
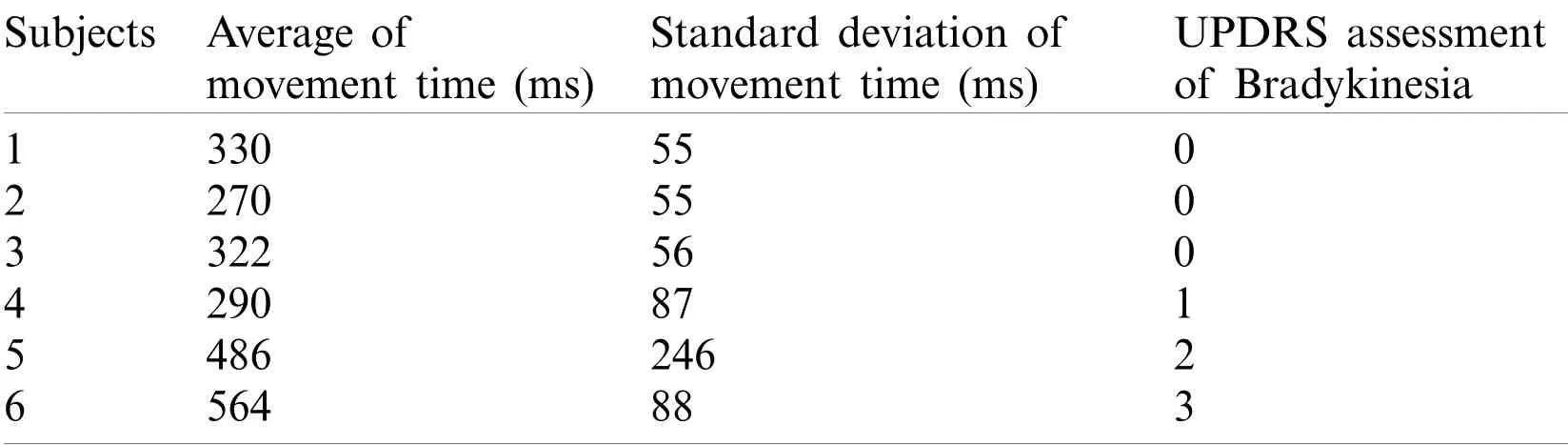
Table 13:Time recording table
It can be seen that the average finger movement time is 307 ms,and the standard deviation is 55 ms.The higher the level of bradykinesia is,the more serious the disease is.According to the experimental results,the severity of symptomSis approximately linear with the finger touch timeT.The following Eq.(4)is a simple formula of the linear relationship between S and T:

wherea,bare the coefficients which can be determined by experimental results.
5.4 Error Analysis
As can be seen in the experiments,the resting state waveform of Sample 1 is not very smooth which may be caused by the following factors:
(1)The fingers cannot stay completely still.
(2)The interference of surrounding environment exists.
6 Conclusion
In this paper,we presented the design and implementation of a smart wearable device(smart ring)for detecting hand tremor for Parkinson’s disease patients.We used MPU6050(MIDI Processing Unit)consisting of a 3-axis gyroscope and a 3-axis accelerometer to collect acceleration and angular velocity of fingers.By analyzing the time of specific finger movements,we successfully recognized the tremor signals with high accuracy.Meanwhile,with Bluetooth 4.0(Bluetooth Low Energy,BLE)and networking terminal ability,tremor data are transferred to a monitoring smartphone application in real time.The experimental results have shown that the proposed device is convenient for long-term tremor detection which is vital for early detection and treatment for Parkinson’s disease.As future work,we will continue our study to address the following issues we found with the product:(1)The selected 5 V button battery caused a noticeable amount of power consumption in the process of transmitting data,making the standby time of the smart ring shorter;(2)Although the size of the smart ring is small,the physical switch is big which should be improved;(3)Open source Android APP is selected so that the conclusion can be obtained only by refreshing the interface and then further analysis of data can be conducted to best utilize this smart device.
Funding Statement:This work is supported by the National Natural Science Foundation of China(Grant Nos.61972207 and 61802196),Jiangsu Provincial Government Scholarship for Studying Abroad and the Priority Academic Program Development of Jiangsu Higher Education Institutions(PAPD)fund.
Conflicts of Interest:The authors declare that they have no conflicts of interest to report regarding the present study.
 Computer Modeling In Engineering&Sciences2021年3期
Computer Modeling In Engineering&Sciences2021年3期
- Computer Modeling In Engineering&Sciences的其它文章
- Spectral Solutions of Linear and Nonlinear BVPs Using Certain Jacobi Polynomials Generalizing Third- and Fourth-Kinds of Chebyshev Polynomials
- A Combined Approach of Principal Component Analysis and Support Vector Machine for Early Development Phase Modeling of Ohrid Trout(Salmo Letnica)
- Characteristic and Thermal Analysis of Permanent Magnet Eddy Current Brake
- Geometric Multigrid Method for Isogeometric Analysis
- Traffic Anomaly Detection Method Based on Improved GRU and EFMS-Kmeans Clustering
- The Influence of Various Structure Surface Boundary Conditions on Pressure Characteristics of Underwater Explosion