山地果园轨道运输机研究应用进展
2021-04-26 11:23邹诗洋刘烁玲李沐桐陈中武
现代农业装备 2021年2期
邹诗洋,刘烁玲,李沐桐,陈中武,张 轩
(1.广东省现代农业装备研究所,广东 广州 510630;2.华南农业大学电子工程学院/人工智能学院,广东 广州 510642)
0 引言
在乡村振兴战略背景下,水果产业已经发展成为农村脱贫攻坚的主战场,在推进农业经济发展、改善自然生态环境、乡村区域脱贫等方面至关重要[1]。随着农村人口老龄化和劳动力短缺现象加剧,山坡地果园的生产运输迫切需要实现规模化、机械化、现代化。我国大部分果园分布在丘陵地带,地势陡峭,给果园作业带来了极大的困难和危险,轨道运输机可以较好地解决这一难题。我国在这方面的研究起步较晚,现阶段我国的轨道运输机主要分为双轨运输机和单轨运输机,双轨运输机主要包括双向牵引式双轨运输机、拆装式双轨运输机、变轨式双轨运输机、自走式双轨运输机;单轨运输机主要包括载人汽油自走式单轨运输机、牵引式单轨运输机和电动单轨运输机[2]。本文通过研究国内山地果园轨道运输机的现状,分析存在的问题,提出了轨道运输机的未来发展方向。
1 双轨运输机
李善军等[3]设计了一种7YGS-45 型自走式双轨道山地果园运输机,最大爬坡角度达到47°,平均运行速度为1.0 m/s,最小水平转弯半径为8 m。采用碟刹和抱轨刹等制动方法,保证了小车运行的安全性。
欧阳玉平等[4]设计了一种山地果园拆装单向牵引式双轨运输机,最大爬坡角为40 °,运输机钢丝绳直径为7.7 mm,轨道最小倾角为5.7 °,最小水平转弯半径为7 m,上行平均速度为0.51 m/s,下行平均速度为0.54 m/s。具有运载平稳、运载力强、搬移便利、可拆装等特点,可以实现标准化和规模化生产。除此之外,欧阳玉平等[5]设计了一种适用山地果园的基于PLC 双轨运输机自动停车系统,该系统采用旋转编码器等硬件,能够实现载物车在设定区间内运行、自动往返及自动定位停车等功能,提高了运输机的安全性、便捷性、柔性、可靠性。在上述研究基础上,欧阳玉平等[6]对适用于该双轨运输机的控制系统进行研究,设计了以PLC 为控制核心、集成了编程、变频调速、运载参数监控等技术于一体的自动控制系统。该系统运行可靠,编码器定位系统定位准确,可实现任意定位自动停车,运输机速度可调节,无线遥控器的通信成功率高,满足拆装牵引式双轨运输机的智能化控制需求。
山地果园牵引式双轨运输机是一种由钢丝绳牵引、载物滑车沿已经铺设好的轨道行驶的运输工具,运输机可分为双向牵引、变轨、固定和可拆装等不同形式。这种类型的运输机具有坡地适应能力强、运行稳定、运载能力强等优点。由于这类运输机特殊的作业环境,钢丝绳使用过程中会出现疲劳断裂,可能引发载物车溜车安全事故。针对上述问题,为了提高牵引式双轨运输机的安全性能,欧阳玉平等[7]设计了一种机械式断绳制动装置,通过ADAMS进行动力学仿真和高速摄影碰撞试验,发现最终制动时间、接触点的碰撞力回弹距离以及轨道横梁与制动杆碰撞后的明显回弹次数随着接触点碰撞力和装载质量的增大而减小。进行了制动试验,制动成功率为100%,达到了预期效果。但存在以下问题:一是钢丝绳的断绳位置对制动杆制动影响较大;二是结构尺寸对制动杆的实际制动能力影响较大。对此,徐宁等[8]设计了一种单向牵引式双轨运输机纯机械式摩擦制动装置。制动试验结果表明,该装置制动成功率为100%,同时发现了制动时间及振幅随着装载质量的增大而增加。
卷扬机启动速度曲线决定运输机牵引系统牵引性能,目前主要是梯形折线式速度曲线,这一类速度曲线速度过度处不平缓,影响了提升机的运行稳定性,容易造成滑绳或断绳事故。为了寻找适合山地果园轨道运输机的牵引速度曲线,欧阳玉平等对山地果园双轨运输机牵引系统进行了动力学仿真与试验,通过虚拟样机仿真,构建运输机虚拟样机模型,如图1 所示。同时,进行钢丝绳承载力验证试验,通过比较仿真值与计算值,得出与梯形速度曲线相比,S 形速度曲线在提升运输机运行稳定性、减少钢丝绳的冲击损伤方面具有优势[9]。

图1 运输机虚拟样机模型
黄杰贤等[10]在原有的遥控系统上增加基于单片机的通信校验模块,实现了双轨运输机遥控故障自检测功能。同时,设计了低能耗电路,使该遥控系统具备休眠和唤醒模式。从而提高了双轨运输机的安全性能,延长了运输机作业时间。该方法具有普适性,可应用在同种类型农业运输机遥控控制上。
目前,国内的关于双轨运输机的研发多数围绕机械研发方面,例如防侧翻、断绳制动等设计,关于运输机振动测试系统的研究则较少。黄水鸿[11]设计了一种山地果园双轨运输机振动测试系统,通过对设备运输过程中的速度以及振动信号进行采集,然后在时域、频域对振动信号进行分析,从而得到了山地果园双轨运输机速度与振动之间的关系,该研究可以减少水果因为振动而损坏的情况,并且可以延长设备的使用期限。
牵引式双轨运输机工作时容易出现钢丝绳乱序现象,严重时,将导致驱动装置无法正常运作。为解决此问题,欧阳玉平等[12]设计了一种山地果园牵引式双轨运输机双螺旋式自动排绳装置,排绳装置示意图如图2 所示。通过综合排绳测试试验,结果表明,该排绳装置不仅具备有序排绳的能力(如图3),而且具有降低驱动装置振动噪声和耗能少等优点 。
2 单轨运输机
相比较双轨运输机,单轨运输机具有占地空间小、架设简单、铺设方便、建造成本低等优势[13]。单轨运输机大多数采用链条链轮传动形式作驱动,设备质量较轻,因此其爬坡能力强,运输效率高,十分适用于丘陵地区果园。
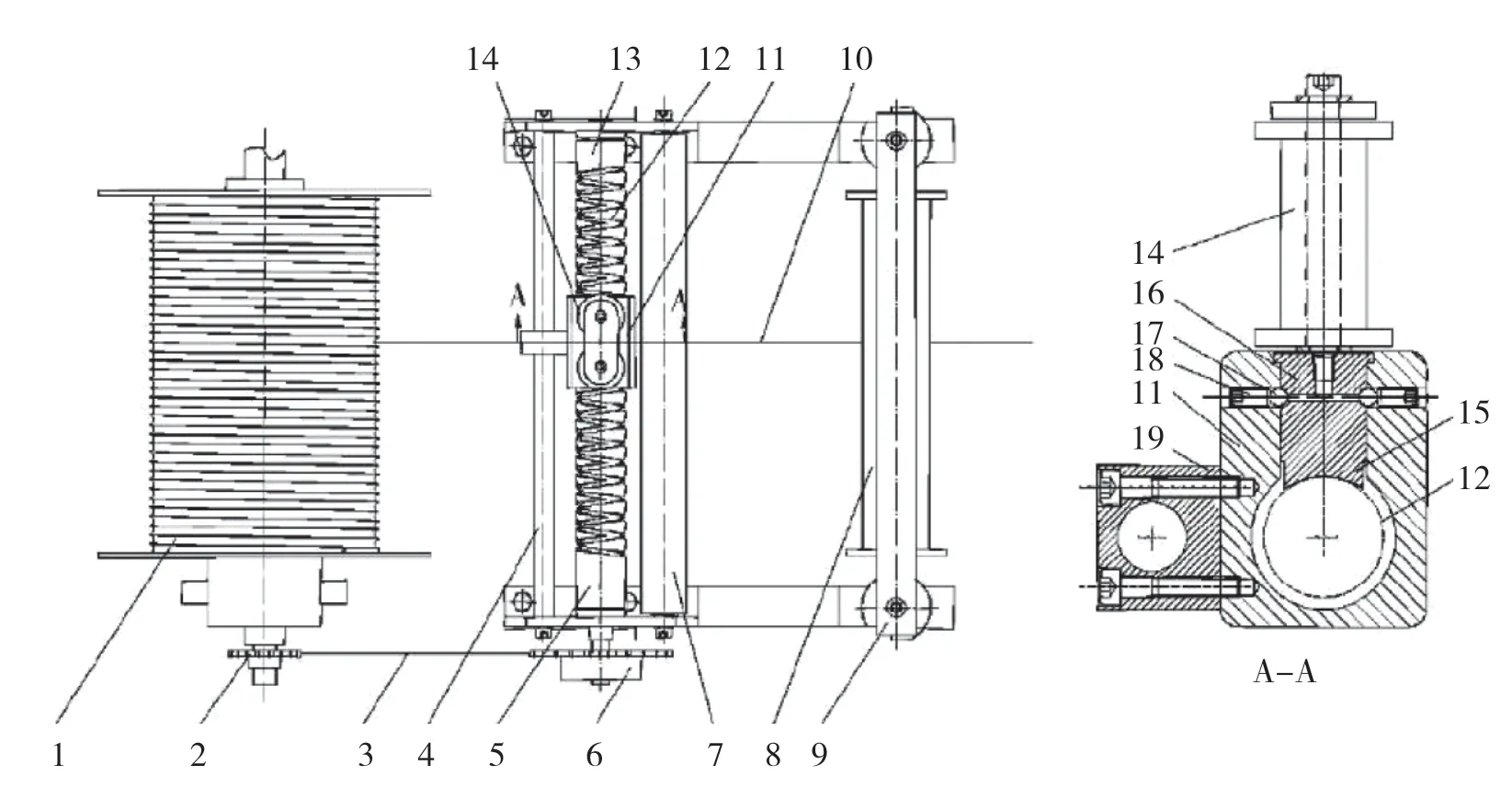
图2 排绳装置示意图

图3 排绳效果试验
汤晓磊等[14]设计了一种7YGD-45 型电动遥控式单轨果园运输机,采用5.5 kW 电动机作为动力源。主要适宜坡度小于40 °的缓坡地,可以实现4 m 转弯半径内的转弯和轨道上任意点制动等功能,运输机的启动和停止由遥控装置控制,适用于远距离大坡度的果园运输。陈银清等[15]通过建立山坡地果园单轨货运机的结构尺寸、最小转弯半径、电动机驱动功率、最大承载量之间关系的数学模型,对最小转弯半径和最大承载量进行分析,结果表明:最小转弯半径与导轨和导向轮滚轮之间的配合间隙等结构尺寸有关,最小转弯半径随配合间隙增大而减小。最大承载量与最小转弯半径、电机的驱动力等结构尺寸有关,最大承载量随转弯半径减小而减小。邱晔明等[16]研究了设备传动系统的设计和齿轮箱等的设计,设计了一种适合山地果园单轨运输机。该设备利用齿轮、皮带等机构进行传动,使用小功率柴油发动机作动力,在单轨道上可实现前进、倒退等动作。罗瑜清等[17]设计了一种山地果园电动单轨运输机控制装置,可实现运输机的及时停车,可靠性高达100%,同时发现,系统消耗电流量随着爬行坡度、装载质量、行驶速度增加而增加,且对其影响变大。李学杰等[18]对遥控单轨运输机进行优化设计,运输机整机的结构示意图如图4 所示,将四杆杠杆、撞块联动离合刹车机构取代了原机的遥控装置,实现运输机能够在轨道上任意自动停车和可靠制动。同时对原机防侧倒的T 型夹紧轮和发动机进行了改进,缩小了设备的外形尺寸,简化轨道结构,不仅节约轨道建设成本40%以上,而且提高了运载能力,使得爬坡角度达40 °,上、下坡负载质量分别为500、1 000 kg,最小转弯半径小于4 m。该设备以汽油机为动力,因而不受制于某些偏远山区电力缺乏的情况,相比于牵引式和索道式,该设备不存在因钢丝绳断裂而引发载物车溜车安全事故的因素。加之该设备可实现无人驾驶,所以安全性和适应性比其他运输机高。

图4 运输机整机的结构示意图
张俊峰等[19]设计了一种山地果园遥控单轨运输机,该设备由链轮链条机构实现驱动,机架配备防脱轨防侧倒装置,防止运行时脱轨和侧倒,实现了单轨运输机的遥控驾驶。该单轨运输机爬坡角度不大于38 °,上、下坡可分别载重300、1 000 kg,转弯半径不小于4 m,遥控距离达300 m,工作安全可靠,适用于山地果园作业。李震等[20]设计了一种山坡地果园蓄电池驱动单轨运输机,该设备以无刷直流电动机为驱动,以蓄电池为动力;运输机在平地的行驶速度为0.58~0.60 m/s,爬39 °斜坡时的速度为0.28~0.45 m/s,可以搭载0~100 kg 负载,工作时的最大噪声为83.87 dB;通过电流损耗试验发现,装载质量对平地行驶时速度影响较小,而对爬坡速度影响较大;试验中该设备的变速比是固定的,进一步的优化中可以考虑引入变档机构。
3 结语
1)轨道运输机对于实现山地果园产业实现机械化、现代化、规模化具有重要的意义。未来果园轨道运输机主要向智能化、集成化、轻量化、精细化方向发展,研发针对性强、载重量更大且控制系统更加智能的果园轨道运输机将成为未来发展趋势。
2)目前,国内关于轨道机的研发多数围绕机械研发方面,例如防侧翻、防脱轨、断绳制动等设计,关于运输机测试系统的研究则较少。轨道振动对轨道作业安全性以及果实损坏率具有重要影响,但是现阶段对轨道的振动测试系统研究较少,且对于不同种类的运输机,现有测试系统的兼容性不够好。
3)实现测试系统实时监测轨道运输机的运行状态,具备良好的兼容性,收集信息全面精细将成为规范运输机测试系统的未来研究方向。
4)在规模化生产方面,政府有关部门应该给予支持和帮助,加速产品升级和产业化进程,早日实现山地果园产业高度机械化和现代化。
猜你喜欢
青海草业(2022年2期)2022-07-23
小学生优秀作文(低年级)(2021年11期)2021-12-06
军事文摘(2020年15期)2020-08-15
小哥白尼(军事科学)(2019年5期)2019-08-27
语文世界(小学版)(2019年2期)2019-02-24
乡村地理(2018年3期)2018-11-06
小学生学习指导(小军迷联盟)(2018年10期)2018-10-12
乡村地理(2018年4期)2018-03-23
现代兵器(2017年4期)2017-06-02
小天使·一年级语数英综合(2014年7期)2014-06-26