一种带自动弱磁装置的混合式转子永磁同步电机设计与研究
2021-04-23 05:00
电气传动 2021年8期
(江西理工大学电气工程与自动化学院,江西 赣州 341000)
随着环境和能源问题日益严峻,永磁电机行业对高效率、高功率密度和宽恒转矩输出范围的要求也在不断提高[1-2]。永磁同步电动机的转子结构一般多为表贴式和内置式。表贴式永磁同步电动机具有动态响应快、转矩脉动小等优点,但其功率密度低、弱磁性能差。内置式永磁同步电机具有高效、高转矩密度、过载能力强等优点,但漏磁和转矩波动较大。因此,专家学者们针对表贴式永磁同步电动机和内置式永磁同步电动机的优点,提出了一种混合转子结构永磁同步电动机[3],并对其进行了深入的研究[4-5]。
传统的永磁同步电动机内部磁场调节困难,运行过程中永磁体容易退磁,限制了其进一步发展和应用[6-7]。近年来,为了解决传统永磁同步电动机恒功率范围窄、转速范围有限的问题,专家学者们提出了变磁通永磁同步电动机[8-10]。变磁通永磁同步电机调节磁通的方式可分为三种:直接调磁式、混合励磁式和机械调磁式。机械式变磁通电机[11-12]通过附加的机械装置来调节内部磁场,以达到弱磁扩速的效果,在变速驱动和工业制造方面得到了广泛的应用。主要调整形式有调整转子、调整气隙、漏磁式和离心式。转子调整式机械变磁通电机[13-14]主要通过机械装置改变转子或永磁体的位置,以实现弱磁效果但永磁体的利用率较低。气隙调整式机械变磁通电机[15]通过改变轴向电机气隙长度来实现气隙磁链的调整,可靠性差。漏磁式机械变磁通电机[16]通过机械装置与永磁体接触来改变磁路并降低主磁通。离心式机械变磁通电机[17]通过调节不同转速下的离心力大小来调整永磁体和定子线圈的重叠区域,以达到削弱磁通的目的。
结合离心式机械装置简单可靠与混合式转子永磁同步电机高效高功率密度的优点,提出了一种带自动弱磁装置的混合式转子结构永磁同步电机。本文详细阐述和分析了永磁同步电机的设计和机械调磁装置的弱磁原理。研究结果表明,该电机能够较为准确地控制弱磁效果,且经过弱磁后,电机恒转矩区域变化较为明显。本文为新能源汽车驱动和风力发电等领域的应用提供了一定的理论参考。
1 整体模型
1.1 混合式转子永磁同步电机结构
混合式转子永磁同步电机定子与传统结构相同,转子磁极由表贴式永磁体和内置式永磁体组成,如图1所示。每极下有3个径向充磁的永磁体,相邻的表贴式永磁体和内置式永磁体在每相下形成1个串联回路。需要说明的是,表贴式永磁体是辅助磁极,它的特殊形状可以帮助优化反电动势波形,提高电机的转矩性能。内置式永磁体作为主磁极,是电机励磁的主要来源。与传统的永磁同步电动机相比,混合式转子永磁同步电机可以降低漏磁,全面提高电机的性能。
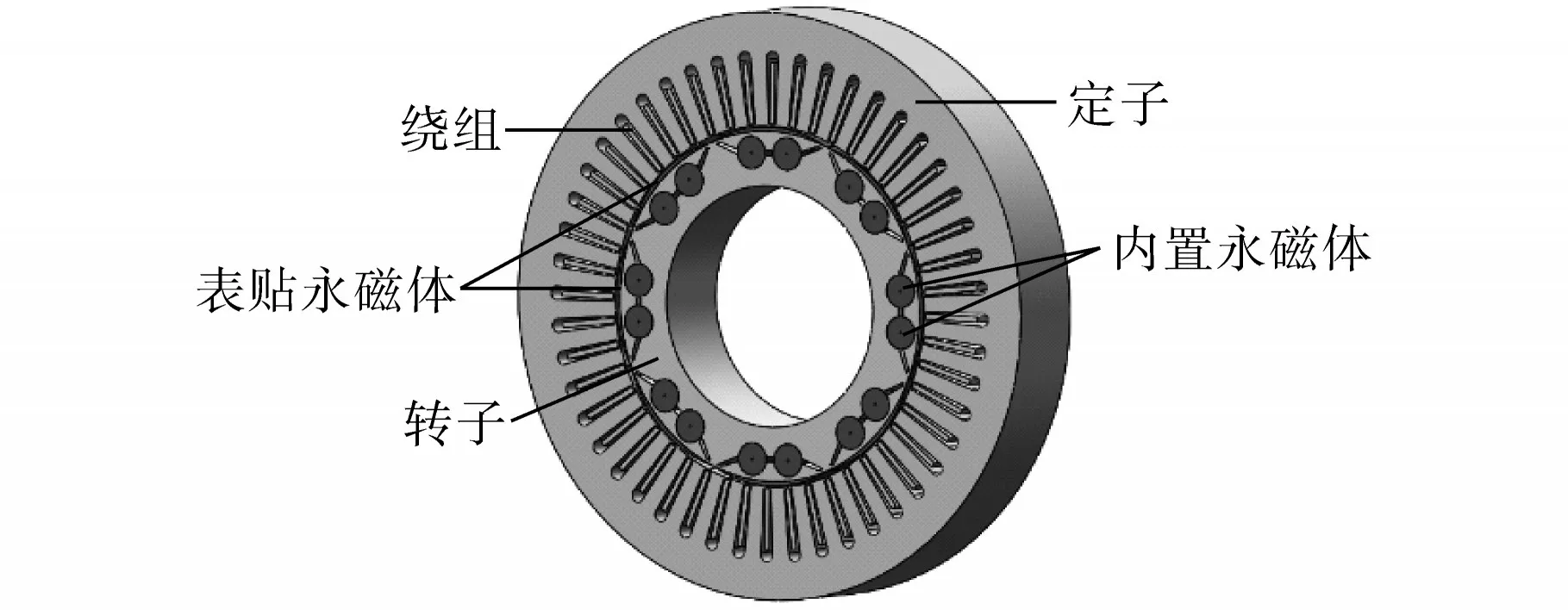
图1 混合式转子永磁同步电机拓扑结构Fig.1 Topology structure of hybrid rotor-structure PMSM
电机部分参数如下:额定功率1 kW,定子槽数48,转子极数 8,额定转速 750 r∕min,定子外径269.24mm,转子内径110.64mm,气隙长度0.5~1mm,每槽导体数7,绕组连接方式Y。
1.2 机械装置结构
混合式转子永磁同步电机机械调磁装置主要由转盘、滑块、齿轮和连杆组成,结构如图2所示。该装置安装在转轴上,通过连杆与圆形内置永磁体连接,转盘与转子同步转动,电机整体装配图如图3所示。弹簧分别与滑块和转盘连接,以限制滑块的运动。当滑块所受离心力大小发生变化时,滑块沿滑槽径向滑动,使推动两侧齿轮转动时的径向离心力转化为切向力。该装置无需外力驱动,整个弱磁过程仅由滑块所受的离心力驱动滑块完成。该机械装置制造简单,调磁效果较好,可靠性高。
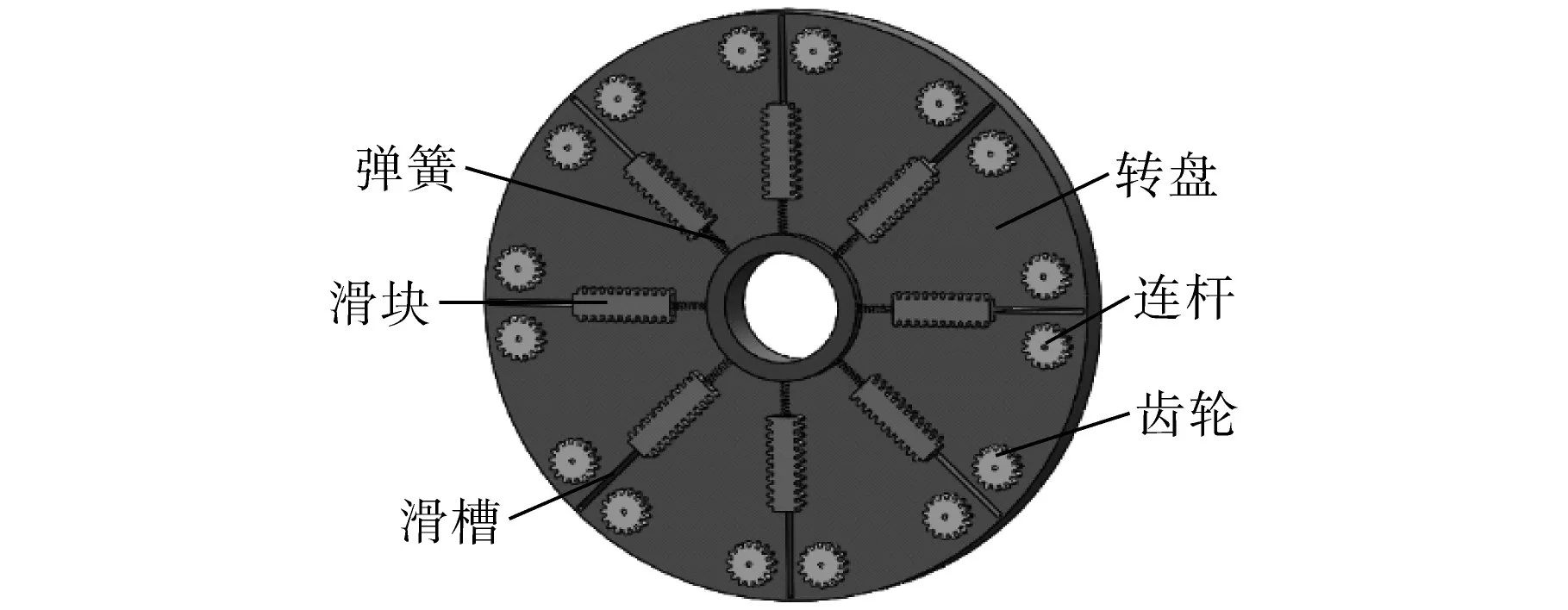
图2 机械调磁装置结构Fig.2 The structure of the mechanical flux-adjusting device
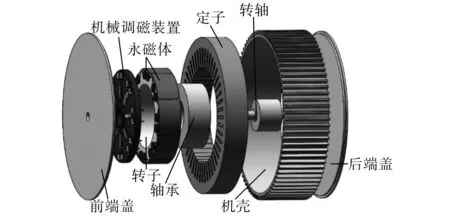
图3 电机整体装配图Fig.3 The explosion view of the motor
2 工作原理
2.1 电机工作原理
混合式转子永磁同步电机的工作原理是通过机械装置调整圆形内置永磁体的旋转角度来改变磁极的磁化方向,从而改变合成磁势的大小,如图4所示。磁链随内置永磁体旋转角度的变化而变化,通过调整气隙磁场的强度来达到弱磁扩速的效果。

图4 电机工作原理Fig.4 The principle of motor operation
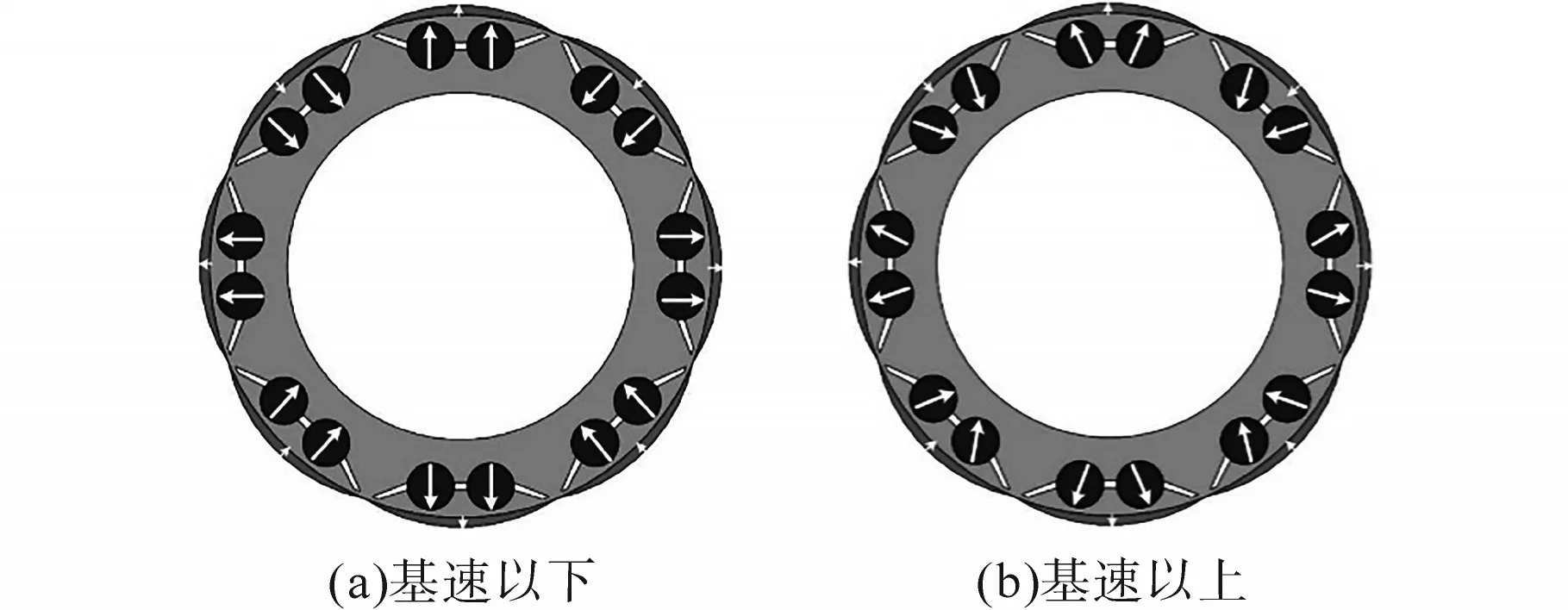
图5 永磁体磁化方向Fig.5 The magnetization direction of permanent magnet
利用Clark变换和Park变换将三相静止坐标系转换为两相旋转坐标系,从而得到d轴的磁链如下式所示:

式中:Ψd为d轴磁链;Ψq为q轴磁链;id为d轴等效电流;iq为q轴等效电流;Ψpm为永磁磁链的幅值。
当电机在基速下运行时,定子电压方程如下:
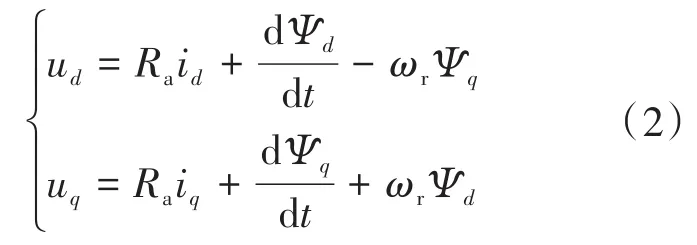
式中:Ra为电枢绕组电阻;ωr为转子电角速度。
当电机运行在基速以上时,磁通量大小随永磁体旋转角度而改变,直角坐标系下电机的定子电压方程可以表示为
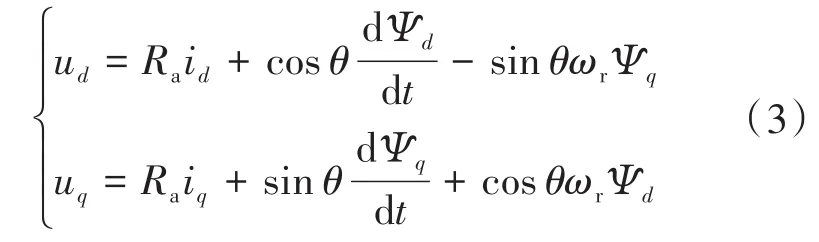
式中:θ为永磁体的旋转角。
2.2 调磁装置工作原理
滑块在机械调磁装置中的相对位置由离心力Fc和弹簧反作用力Fs决定。
由下式可知,滑块的离心力Fc与转盘的角速度ω、滑块的质量m以及滑块质心与转轴的距离r有关。不同转速下滑块与齿轮的相对位置不同,滑块所受离心力大小取决于电机转速。

电机运行时有3种状态:基速以下、基速和基速以上。为了更好地解释机械调磁装置运行的原理,假设调磁过程发生在理想状态下。滑块只受离心力和弹簧反作用力的作用,忽略了滑块、齿轮和转盘之间的摩擦力。图6为机械调磁装置在不同状态下的运行情况。
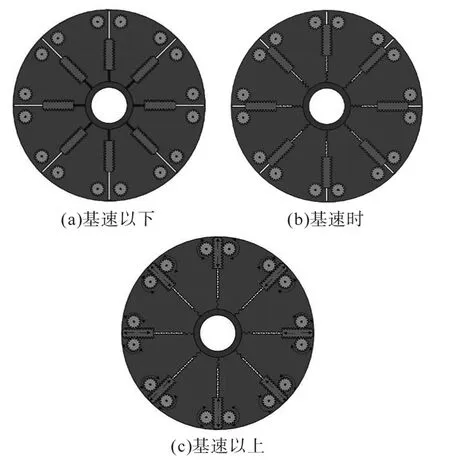
图6 机械调磁装置运行情况Fig.6 The operation of mechanical flux-adjusting device
当电机运行在基速以下时,如图6a所示。转盘匀速旋转,滑块的离心力等于弹簧反作用力,方向相反,此时弹簧变形程度最小,滑块受力平衡,几乎不发生位移。
当电机以基速运行时,如图6b所示。当电机从低速升高至基速时,滑块的离心力增大,受力不平衡,滑块沿滑槽向外滑动,直至与齿轮接触,但不产生使齿轮旋转的切向力。
当电机在基速以上的情况下运行时,如图6c所示。此时,作用在滑块上的离心力变大,弹簧形变程度较高,滑块所受离心力大于弹簧的反作用力,迫使滑块推动两侧齿轮转动,齿轮通过连杆带动圆形内置永磁体转动,左侧齿轮逆时针转动,右侧齿轮顺时针转动,永磁体合成磁动势的方向不变。当转速从基速降到基速以下时,弹簧反作用力大于离心力,滑块沿滑槽向转盘中心滑动,左侧齿轮顺时针转动,右侧齿轮逆时针转动。当滑块移回至图6b的位置时,内置圆形永磁体的磁化方向回到初始位置,此时合成磁动势达到最大值。
3 机械动力学分析
3.1 虚拟样机模型
机械装置随转子同步旋转而产生的离心力是实现混合式转子永磁同步电机调磁的关键。机械动力学仿真主要是分析机械调磁装置在不同转速下的运行特性和调磁过程中齿轮的旋转角度,以此验证该装置对电机内部磁场的调节能力。
机械调磁装置中各部件的材料首先必须满足非导磁和强抗形变的要求。模型所用材料为奥氏体不锈钢,具有耐高温腐蚀、抗变形能力强、无导磁性等优点。密度为7.93×10-6kg∕mm3,杨氏模量为200 Gpa。
ADAMS软件可通过导入的机械装置模型自动计算重量、质心和转动惯量等参数。通过在不同组件之间添加自由度约束来确定组件的相对位置关系和运动方式。调磁装置组件之间的约束关系如表1所示。
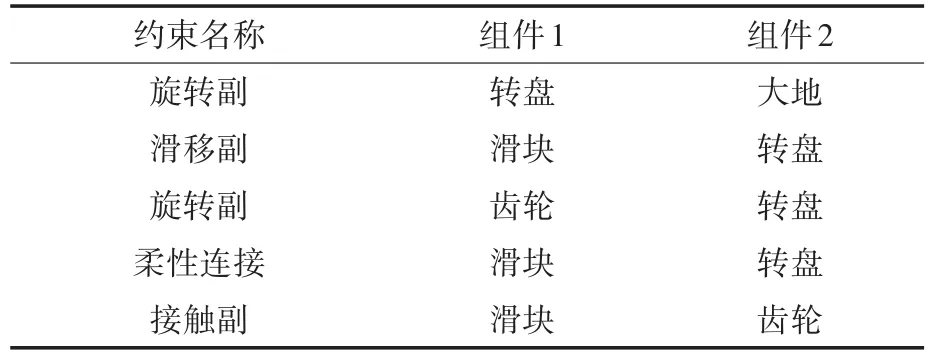
表1 调磁装置组件约束关系Tab.1 The constraint relationship between the components of the flux-adjusting device
3.2 仿真结果分析
仿真采用加速驱动的方式求取机械调磁装置在不同转速下的运动特性。虚拟样机转速与加速度的关系如图7所示。
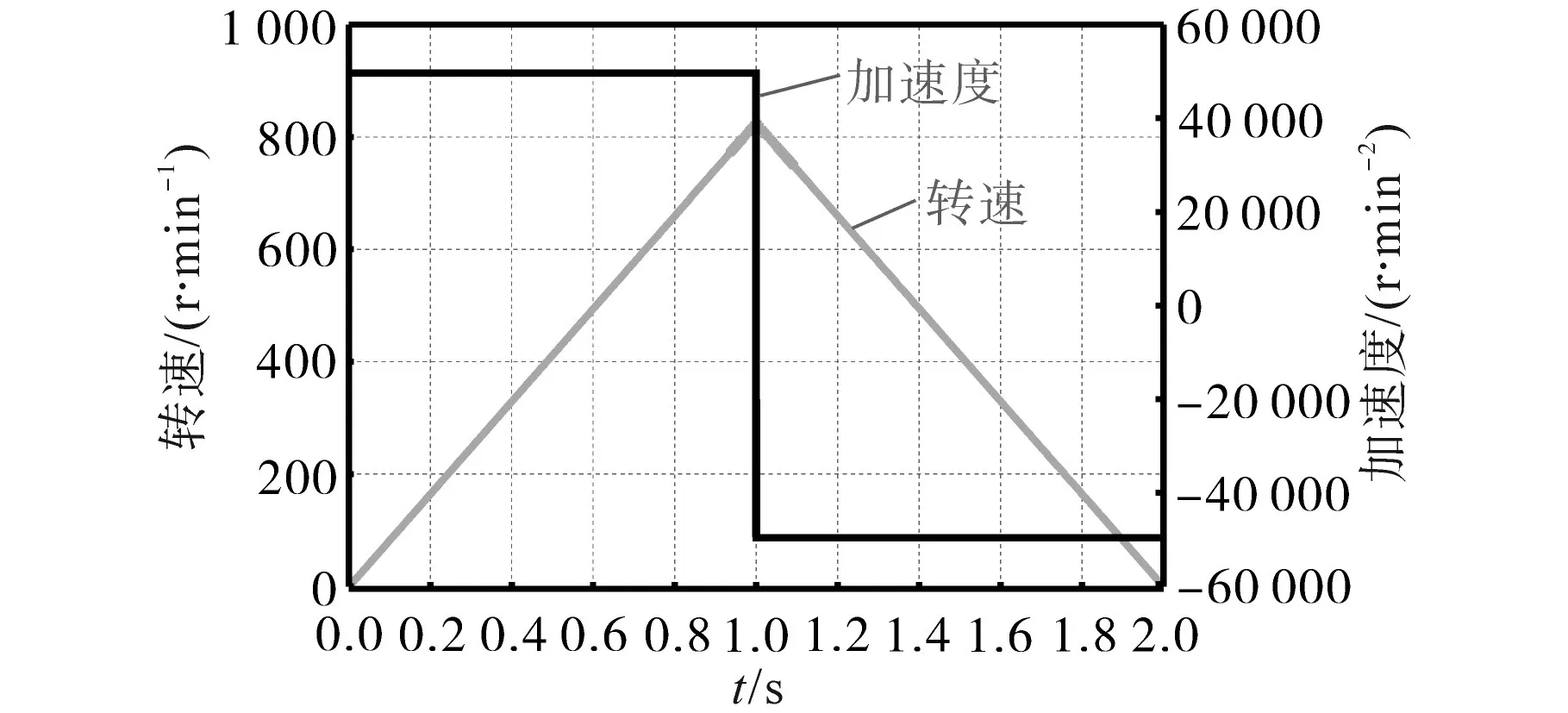
图7 虚拟样机转速与加速度关系图Fig.7 The relationship between acceleration and speed of virtual prototype
图7中,0~1 s时,虚拟样机模型以49 600 r∕min2的加速度稳定加速至 825 r∕min;而 1~2 s时,以-49 600 r∕min2的加速度稳定减速至0。当带有自动弱磁装置的永磁同步电机在不同转速下运行时,可以计算出永磁同步电机的旋转角。
当转盘转速从基速(750 r∕min)以下增加至基速以上(825 r∕min)时,滑块开始与齿轮啮合。然而由于物体的惯性,齿轮的旋转角度会有轻微的波动。在1 s时转盘达到最大转速,齿轮由连杆带动圆形内置式永磁体旋转30°,此时转盘转速为825 r∕min。1 s后,随着转盘转速的降低,滑块所受离心力减小,齿轮的旋转角度从30°恢复至0°的初始位置,如图8所示。
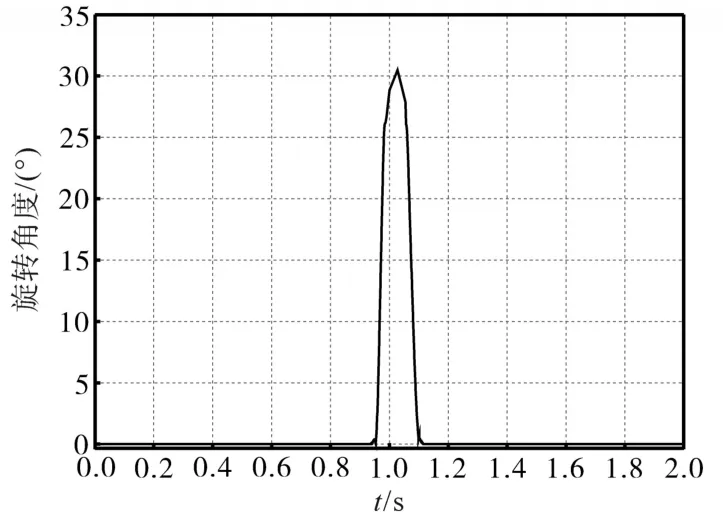
图8 齿轮旋转角度Fig.8 The auto-rotation angle of the gear
4 有限元仿真分析
4.1 磁场分布
混合式转子永磁同步电机同时包含表贴永磁体和内置永磁体,根据麦克斯韦方程进行分析,瞬态磁场的定解问题描述如下:
在ANSYS Maxwell中建立有限元模型并进行瞬态仿真计算,得到同标尺下的磁场分布图如图9所示。电机在基速下运行时,磁场分布如图9a所示,定子铁心中的磁通密度较高,漏磁小。当电机在基速以上运行时,磁场分布如图9b所示。定子铁心中磁通密度较低,漏磁较大,转子铁心磁通密度趋于饱和。
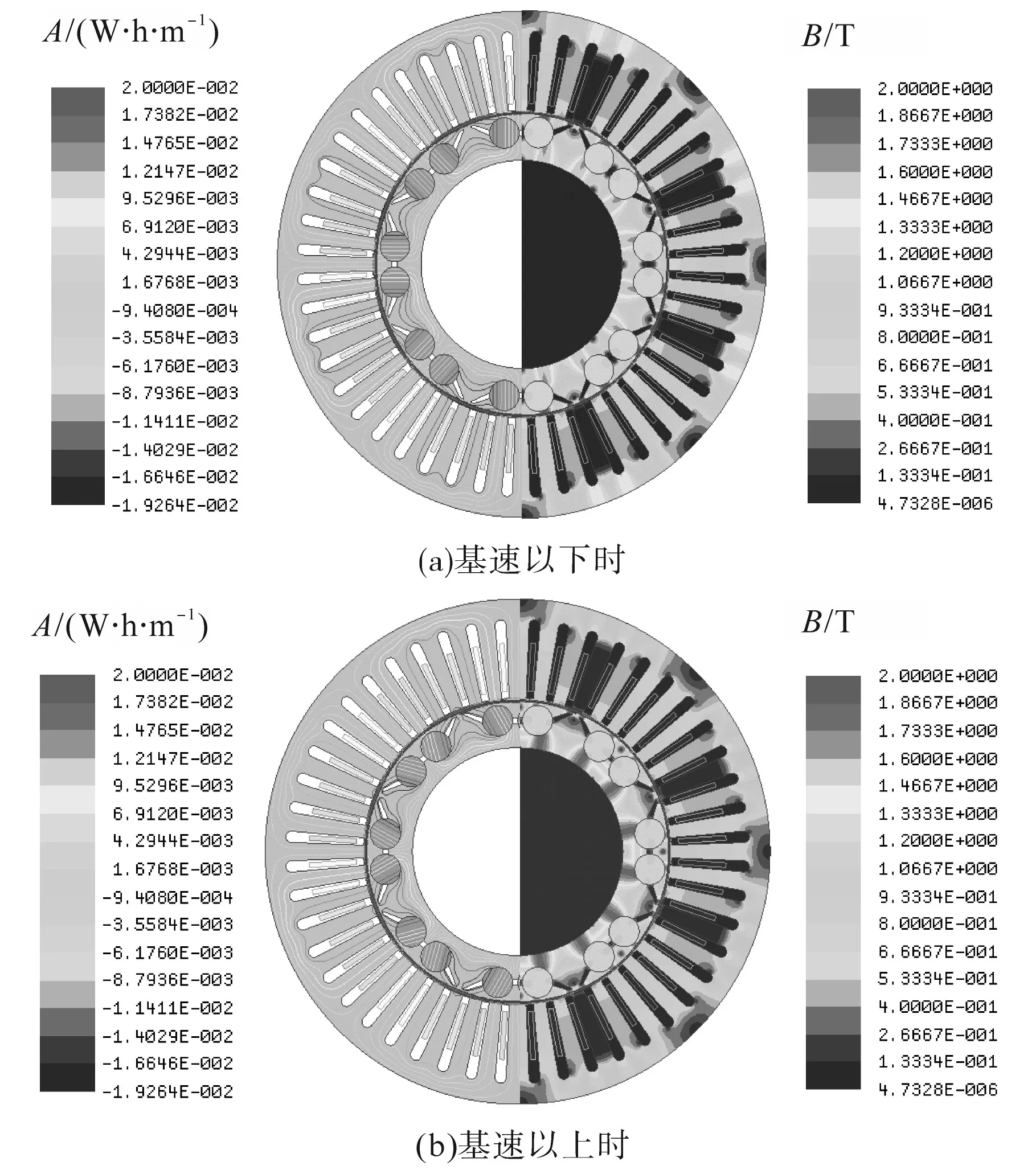
图9 电机磁场分布图Fig.9 Magnetic field distribution diagram of machine
由于圆形内置永磁体通过机械调磁装置旋转了30°,磁化方向发生改变。d轴磁通随着磁阻和漏磁的增大而减小,直接改变了电机内部磁场的分布,达到弱磁的效果。
4.2 绕组磁链
计算电机在两种不同运行速度下的绕组磁链,结果如图10所示。当内置永磁体旋转30°(825 r∕min)时,绕组磁链的峰值有较明显的降低。与初始状态(750 r∕min)相比,绕组磁链的峰值降低了16.7%。

图10 混合式转子永磁同步电机磁链曲线Fig.10 The flux linkage curves of hybrid rotor-structure PMSM
4.3 气隙磁密
气隙磁场的分布不仅影响电机的能量转换,还直接影响感应电动势的波形。进一步研究气隙磁密与转子位置角在不同速度下的关系,结果如图11所示。当电机在基速750 r∕min运行时,气隙磁密波形类正弦度较高,气隙磁密峰值为0.84 T。当电机在基速以上(825 r∕min)运行时,气隙磁密波形发生畸变,峰值降到0.60 T。机械装置带动圆形内置永磁体旋转,d轴磁阻增加,使气隙磁密幅值降低。气隙磁密的幅值会随着旋转角度的增加而减小,由于磁化方向的改变,隔磁桥的作用减弱,磁极之间的漏磁增加。
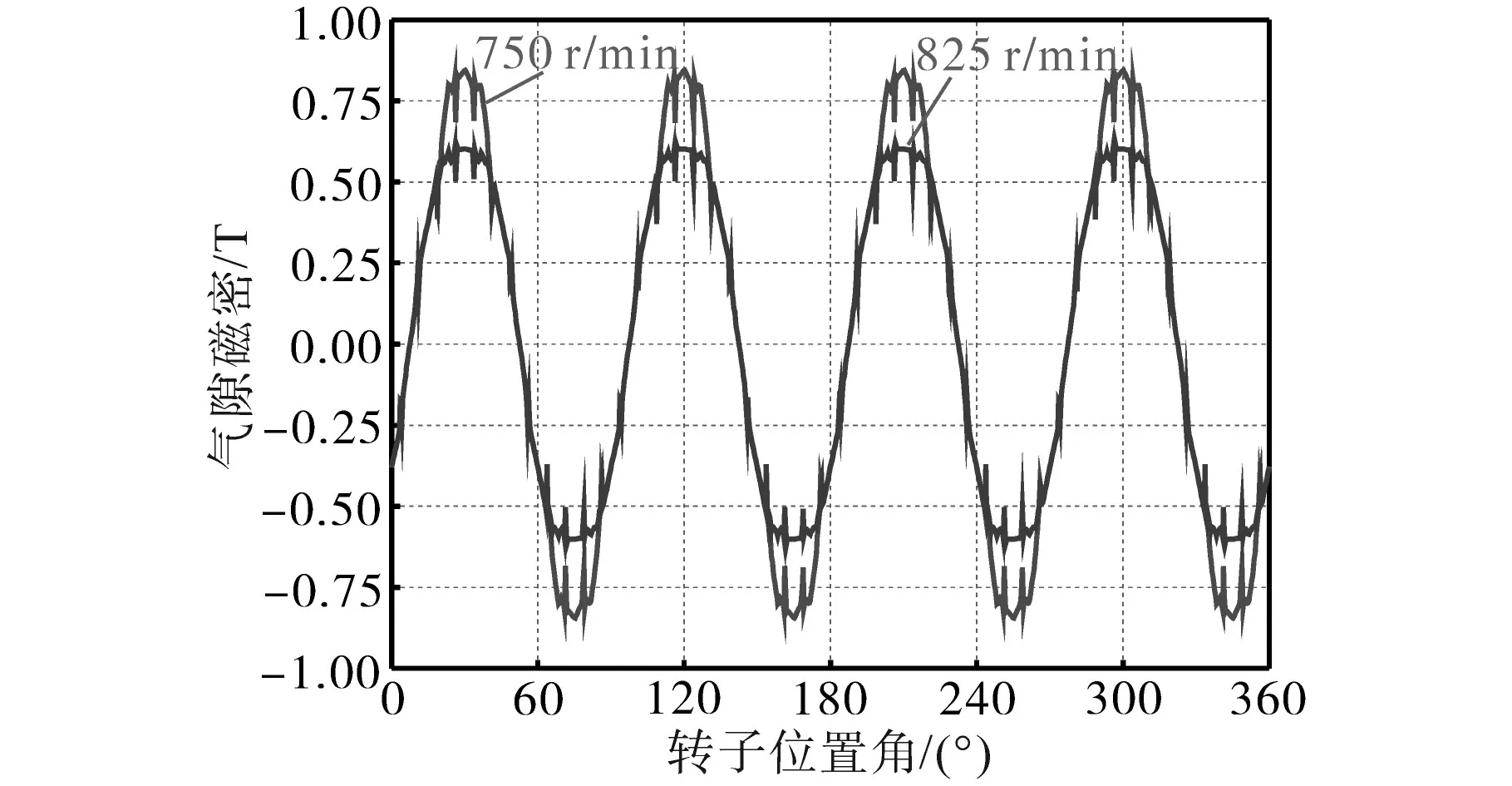
图11 气隙磁密分布Fig.11 The distribution of airgap flux density
4.4 反电势波形
图12为电机在不同运行状态下的反电势波形。由图12可知,当电机运行在永磁体旋转0°(750 r∕min)时,磁通量最大,反电势峰值为29.4 V,反电动势与速度成正比,速度比等于反电动势比;当电机运行在永磁体旋转 30°(825 r∕min)时,磁通量最小,反电势峰值为21.2 V,合成磁链相位与反电势波形随圆形内置永磁体磁化方向的变化而变化。分析结果表明,通过机械式磁通调节装置改变圆形内置永磁体的旋转角度,可以有效地调节电机的内部磁场。
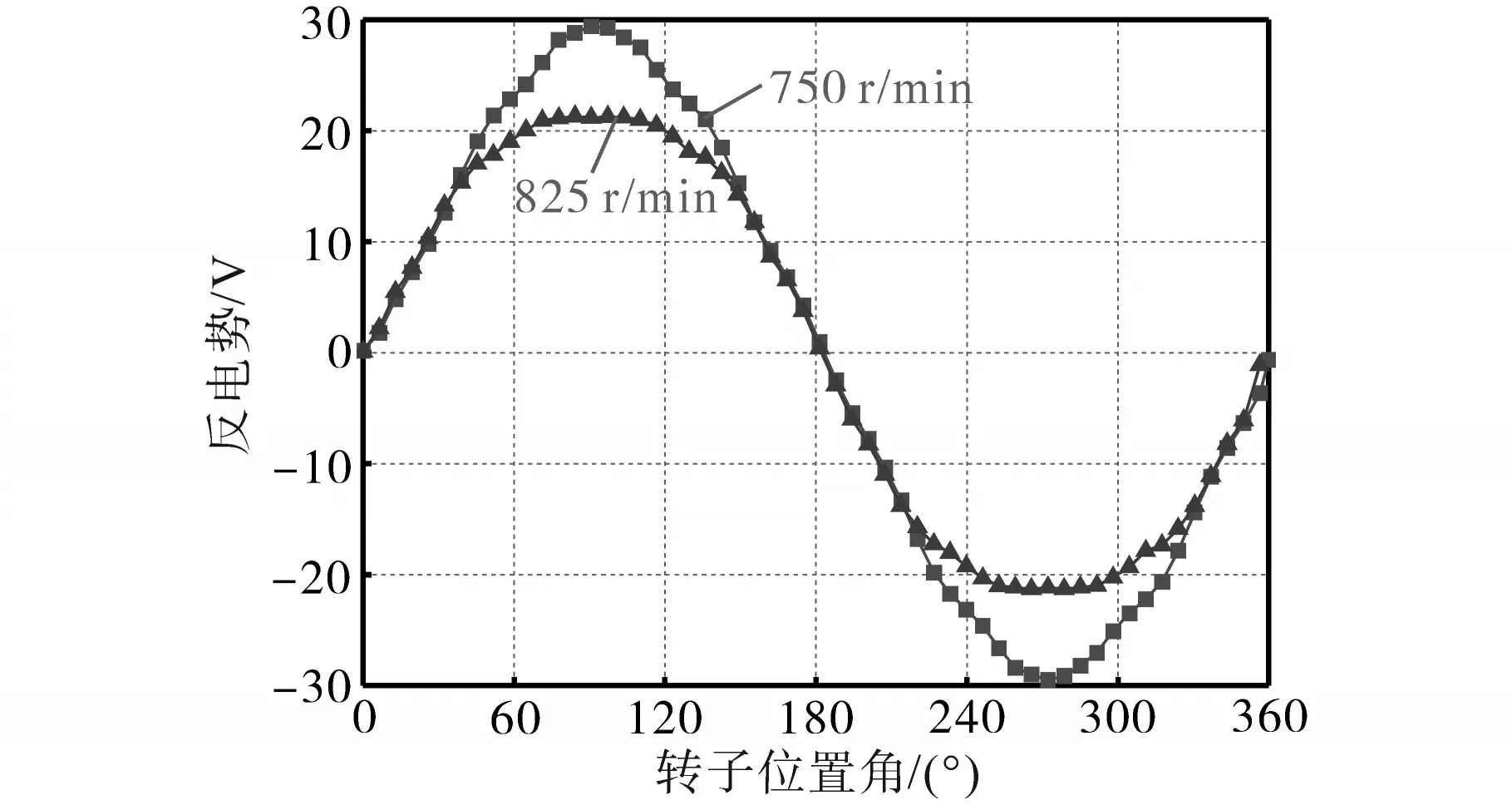
图12 反电势波形Fig.12 Back EMF waveforms
4.5 弱磁能力
以单相磁链为指标,计算了电机在内置永磁体不同旋转角度下的弱磁能力,结果如表2所示。由表2可知,随着永磁体旋转角度的增加,弱磁能力增大。当旋转角度超过90°时,气隙磁场畸变严重,弱磁能力较低。
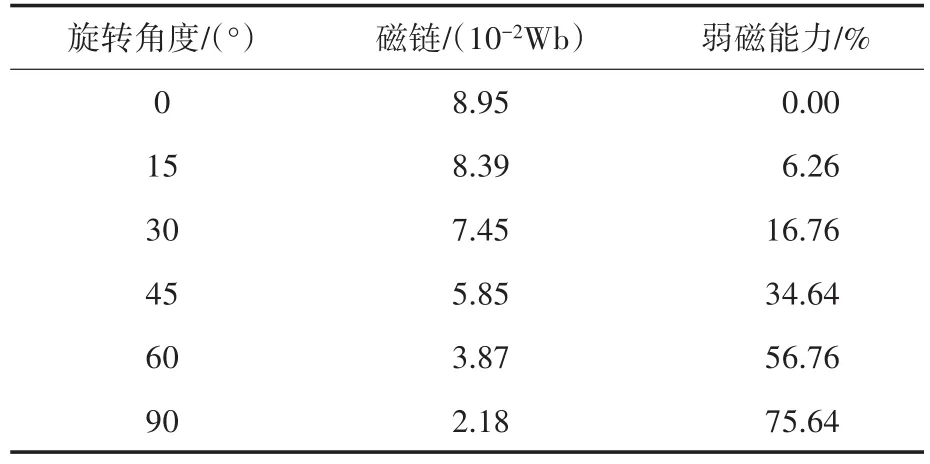
表2 旋转角度与弱磁能力关系Tab.2 Relationship between rotation angle and weakening rate
为了满足高速、高效率的要求,转矩-转速特性被认为是永磁电机的1个关键特性。在基速时采用最大转矩电流比控制混合式转子永磁同步电机来获得最大转矩。当电机的转速超过基速时,由于电动势恒定,必须削弱气隙磁场。电机转速—转矩对比如图13所示。图13表明,当机械调磁装置未启动时,转矩更大但恒转矩区域有限。当圆形永磁体旋转一定角度时,恒转矩区域明显增加。
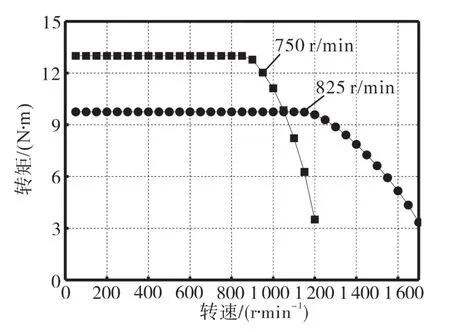
图13 转速—转矩对比Fig.13 Comparison chart of torque—speed
5 结论
为了解决永磁同步电机恒功率范围窄的问题,本文提出了一种带有机械调磁装置的混合式转子永磁同步电机。通过对调磁原理的分析、动力学仿真和有限元分析计算,得出以下结论:
1)机械调磁装置可在不同转速下自动调节圆形内置式永磁体的旋转角度。通过动力学仿真,得到了齿轮旋转角度与时间的关系,验证了机械调磁装置的可行性。
2)带有机械调磁装置的混合式转子永磁同步电机具有良好的弱磁性能。对电机在不同运行状态下的电磁特性进行了分析,得到了弱磁能力与旋转角度的关系。
猜你喜欢
上海大中型电机(2021年1期)2021-06-09
微特电机(2021年1期)2021-01-25
防爆电机(2020年6期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年3期)2020-11-06
仪表技术与传感器(2020年5期)2020-06-11
光学精密工程(2016年3期)2016-11-07
电工技术学报(2015年6期)2015-11-15
城市轨道交通研究(2015年5期)2015-02-27
大电机技术(2015年5期)2015-02-27