无人机航空摄影测量在大比例尺地形图测绘中的应用
2021-04-22 12:59:30马海政李旺平强德霞
甘肃科技 2021年1期
马海政 ,李旺平,强德霞
(1.甘肃省有色金属地质勘查局白银矿产勘查院,甘肃 白银 730900;2.兰州理工大学,甘肃 兰州 730050;3.甘肃林业职业技术学院,甘肃 天水 741020)
无人机航空摄影现在已经广泛的应用于大比例地形图测绘、文物修复、环境监测保护、灾害区域分析和自然资源管理等领域[1]。其数字产品地表分辨率可以满足较高精度的工作需求,但在大比例尺成图中,存在高程及其他精度无法满足建设要求的缺点,提高无人机航测成图高程精度是亟待解决的问题。
1 无人机航摄系统
无人机航摄平台由无人机飞行平台、遥感通信传感器系统、飞控系统、GPS 实时动态差分系统和地面站数据处理系统组成[2]。无人机具有体积小、重量轻、便于携带、控制机操作系统安全高效,并且作业成本低、功能强大、机动灵活等优点[3]。但同时存在着一些缺陷,如拍摄的图片有影像之间重叠不均匀,一些像片像幅过小,其次,重复影像数据量大,基线短,匹配特征重合度小,特征提取精度不够等问题[4]。
2 无人机数据获取
无人机数据获取主要流程为:选择测区、调试无人机以及进行航线的规,确定航向和飞行速度以及飞行时间的长短,控制无人机沿所设航线进行作业,飞机落地检查,获取需要的数据,之后进行数据后期处理[5]。
3 数据处理
3.1 数据准备
由于相机及无人机自身影响,未经处理和选择的无人机相片畸变差比较大,无法直接用于空中三角测量及后期模型建立和数字产品生产,数据的预处理主要是通过提供的相机校检报告参数和实际飞行参数的选择来进行畸变差改正。通过加载影像,对影像数据进行双拼处理后,删除航线外的多余影像,将POS 数据及控制点坐标的导入工程并保存,查看影像的整体情况并判断飞行质量,通过影像质量数据可对后期数据处理的可行性做出判断,数据处理者判定是否需要进行补飞。通过DPGrid软件生成工程参数,检查重叠度、DEM 间隔及所设置的等高距是否满足要求。
3.2 进行空三加密和模型的建立
根据连接点在航空摄影测量像片中的位置和少量地面控制点的像方坐标及其物方坐标,通过平差计算,求解影像的外方位元素和连接点的物方空间坐标[6]。空中三角测量主要包括双拼影像区域网平差和单独影像的区域网平差,选择均匀分布于航测区域的5~6 个像控点进行刺点平差,其他像控点可通过预测功能确定位置以达到快速测量的目的,平差方式选择的是平差软件XSFM,探测粗差并剔除,查看平差报告,采用WGS-84 坐标系下的控制点坐标进行平差,高程精度相对较低,转换为中国2000 坐标系,进行二次平差,比对两次平差精度。
3.3 产品生成
对空三模型基础上加载点云后,匹配离散的像点后,生成DSM,在DP Grid 软件中加载DEM 处理模块,选择DEM 密集匹配的方法,在DEM Matching界面选择匹配方式为ETM 双扩展匹配,经过自动滤波得到DEM,由于实测地区地物的复杂性对DEM及人工建筑的影响,需要对DEM 数据进一步编辑,以提高生产的DOM 的精度。
在DLG 生产过程中,通过立体采集,选择编辑区域并导入的立体像对,在软件提供的符号面板下,选择正确符号,在模型上采集对应的地物、地貌,可以在矢量窗口中显示,一个模型完成后,继续用其他模型采集地物、地貌,直至完成测区内所有规定的地物、地貌的采集;在菜单栏上选中文件,将DLG 成果保存。核查比例尺数值,输出方式不选择结合图表选项,设置图幅信息,完成DLG 图廓,整饰后输出。

图1 DOM 生成图
图2 DLG 生成图
4 精度评价
表1 为像控点初始坐标,表2 中平差时采用的是WGS-84 坐标系下测量点的坐标,查阅大比例尺地形图测绘相关规范,预先将误差最大值设为2cm。可以看出高程精度误差较大,最小误差0.016cm,最大误差接近2.670cm,超出最大误差。将WGS-84 坐标转换为中国2000 城市坐标,平差后得到表3 呈现的平差结果,最大高程误差0.087cm,最小为0.001cm,该高程精度完全满足大比例尺测图规范要求,故在制作城市地区大比例尺地形图时一般选择相对应的城市坐标系,以提高绘图精度。

表1 原始坐标
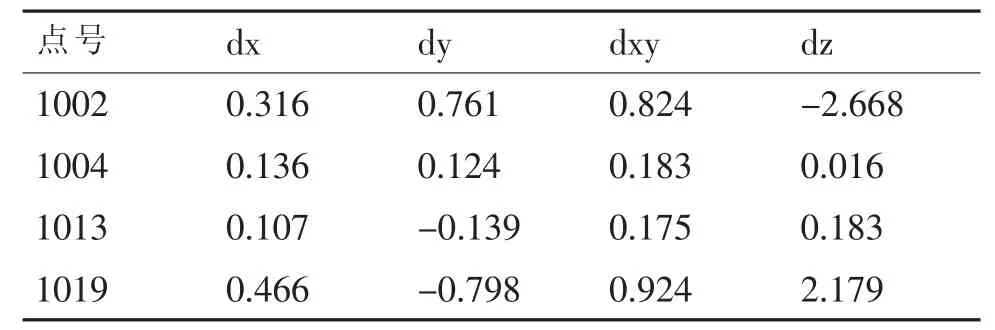
表2 WGS-84 坐标精度评定结果

表3中国2000 坐标系精度评定结果
5 结论
论文主要阐述无人机航空摄影测量数据经过软件处理制作大比例尺地形图。发现在与无人机相匹配的数据处理软件不能满足详细高精度地形地物分类的要求及在地形复杂、地物遮挡严重时,获取高精度大比例尺数字线化图比较困难等缺点;其次,在进行人机交互编辑时,高程点的编辑影响4D 产品的质量,没有详细的规范标准,在制图编辑过程中,掺杂人为因素较多,制图标准误差因人而异。
猜你喜欢
当代陕西(2020年23期)2021-01-07 09:24:44
航空知识(2019年1期)2019-01-11 01:34:48
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
环球飞行(2018年7期)2018-06-27 07:25:52
数学大世界(2018年1期)2018-04-12 05:39:03
中等数学(2017年2期)2017-06-01 12:21:50
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
中国房地产业(2016年9期)2016-03-01 01:26:46
中国非金属矿工业导刊(2015年5期)2015-12-22 06:26:14
全球定位系统(2015年4期)2015-02-28 12:38:13