
基于最大转矩电流比的永磁同步电机自适应滑模控制
2021-04-20 13:59葛晨阳孙新程闫天一胡继磊
机电信息 2021年14期
葛晨阳 孙新程 闫天一 胡继磊


摘要:针对永磁同步电机伺服系统在外部扰动力矩下的速度跟踪控制问题,提出了一种基于最大转矩电流比的自适应滑模控制器。为了简化计算,采用牛顿-拉夫逊迭代法实现最大转矩电流比对电机交直轴电流的分配,并在此基础上改进了自适应滑模速度控制器。为减少滑模控制中的抖振,设计了自适应滑模切换增益。通过仿真实验对比可知,所提控制方式有效提升了系统的动态响应能力、稳态性能和抗扰动能力。
关键词:内置式永磁同步电机;最大转矩电流比;自适应滑模控制;抗扰动能力
0 引言
内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor,IPMSM)因其体积小、结构简单、功率密度高等优点,近年来被大量应用于飞轮储能、电动汽车、轨道交通等需要输出转矩大、动态响应快、调速范围宽的场合。目前,传统的永磁同步电机大量采用的是id=0的矢量控制方式,该控制方式易于实现,非常适合于表面式永磁同步电机(Surface Permanent Magnet Synchronous Motor,SPMSM)。但是由于IPMSM转子结构的特殊性,采用id=0的控制方法会提高电机铜耗,降低电流利用效率,间接提高了系统容量。
最大转矩电流比(Maximum Torque Per Ampere,MTPA)的控制方法可以充分利用IPMSM转子磁路的不对称性所产生的磁阻转矩,提高电机功率密度。但是其电磁转矩Te与交直轴电流id、iq之间存在着非线性的耦合项,增加了计算难度。文献[1]通过传统的查表法计算不同电磁转矩Te对应的id、iq的值,但是这种方法需要大量的数据存储空间;文献[2]提出了基于IPMSM的非线性磁链模型对d轴磁链和电流、q轴磁链和电流分别拟合,得到相应的转矩方程和MTPA条件,但是这种方法对实际系统的运算能力要求较高。
滑动模态控制(Sliding Mode Control,SMC)具有快速响应、对参数和扰动变化不敏感、参数设计无须系统在线辨识等优点,被大量应用于非线性系统的控制中。文献[3]设计了离散的滑模电流控制器,但是忽略了切换项中的不连续性的影响;文献[4]通过引入“准滑动模态”和“边界层”,采用饱和函数来设计切换函数,减弱了抖振,但是饱和函数的设计还是存在不连续性,参数无法实现自适应变化;文献[5]采用模糊控制方法在线调整切换系数,但是滑模控制器中切换系数过多,模糊规则的设计需要大量的工程经验。
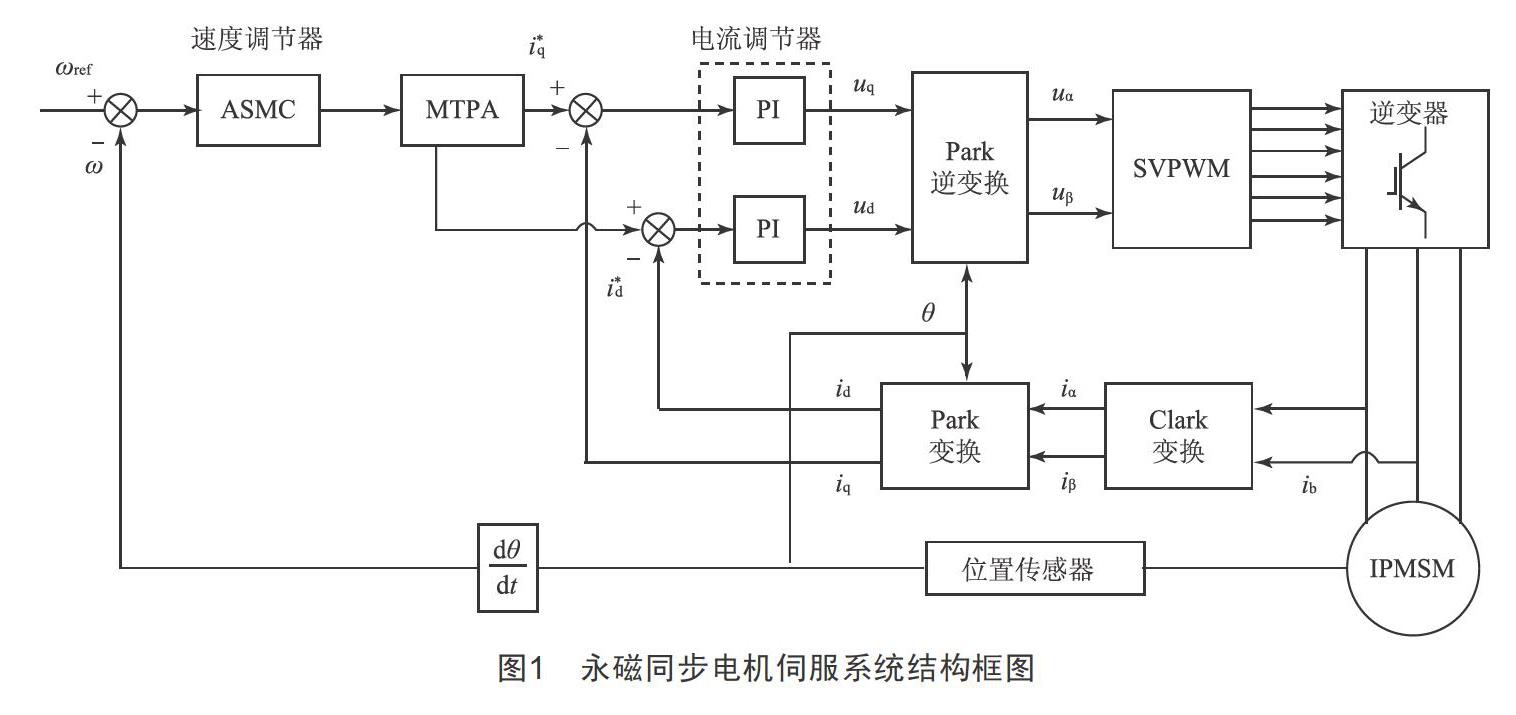
本文以存在外部扰动力矩的永磁同步电机伺服系统为研究对象,结合MTPA与滑模控制方法的优点,提出了一种基于MTPA的自适应滑模控制(Adaptive Sliding Mode Control,ASMC)方法,系统结构框图如图1所示。MTPA控制采用牛顿-拉夫逊迭代计算方法,降低了计算复杂性,提高了工程实用价值。滑模速度控制器中改进了滑模控制律的设计,将自适应控制引入传统的滑模切换项中,使滑模切换增益根据系统到达滑模面的距离自适应调节,降低系统抖振,提高系统动态和稳态性能。对比仿真结果表明,本文设计的控制方法明显提升了电机的速度和转矩响应,系统鲁棒性更好。
1 外部扰动下的永磁同步电机数学模型
永磁同步电机在d-q坐标系下的数学模型可用如下的定子电压方程、电磁转矩方程以及机械运动方程表示:
式中:id、iq、ud、uq、Ld、Lq分别为定子电流、电压和电感在d-q轴上的分量;R为定子的电阻;ψf为永磁体磁链;pn为电机的极对数;J为转动惯量;F为阻尼系数;Te为电磁转矩;TL为负载转矩;Δ为系统受到的扰动力矩;ωm为电机的机械角速度;θm为转子位置角。
结合实际系统中负载力矩、系统参数的变化在一定范围内都是有界的,可以作出如下假设:
假设1:系统的扰动力矩及其变化有界,即存在常数d0>0和d1>0,使得|Δ|≤d0,||≤d1。
假设2:系统的负载力矩在不改变电机负载的情况下为恒定值,其变化量全部等效为扰动力矩。
假设3:由假设1和假设2可得,电机输出的电磁转矩一阶导数连续且有界。
假设4:伺服系统工作在力矩和调速模式,给定的运动轨迹参考值ωref一阶导数连续且有界,二阶导数有界。
通过公式(1)和上述假设可以推出:
2 基于牛顿-拉夫逊迭代法的MTPA实现
最大转矩电流比可以理解为在输出相同的电磁转矩下,需要提供的定子电流值最小,即如式(3)表示的一个极值问题:
4 仿真研究与分析
为验证本文所提控制方法的有效性,在MATLAB/Simulink环境下搭建了仿真模型。其中,采用MTPA的矢量控制方式,基于本文提出的自适应滑模控制原理设计了滑模速度控制器,电流控制器采用了PI控制器。其系统结构框图如图1所示。仿真所选的永磁同步电机参数如表1所示。
自适应滑模控制器的参数设置为:c1=25,c2=10,q=150,ε=2,η0=100,λ=0.004,σ=100,μ=20。系统的外部干扰Δ=
0.5sin(50πt)N/m。图4、图5分别是本文所提控制方式与基于id=0的滑模速度控制器的对比结果。当电机处于调速模式下时,负载转矩恒定为5 Nm,在t=0 s时,给定转速为500 r/min。在t=0.25 s时,转速突变为1 500 r/min。由图4(a)可以看出,基于MTPA的ASMC转速响应更快、转速受扰动影响更小,稳态误差更小。由图4(b)可以看出,当电机启动时,MTPA控制方法能够提高电磁转矩的响应,而ASMC控制方法能够快速降低电磁转矩的超调,达到输出转矩和负载转矩的平衡。
当电机处于力矩模式时,在t=0 s时,电机的转速恒定为 1 500 r/min,初始负载转矩为20 Nm;在t=0.25 s时,转矩突变为40 Nm。由图5(a)和(b)可以看出,当负载变化时,采用本文所提的电机控制方法,可以有效缩减转速和输出电磁转矩动态响应时间,抗扰动能力更强。对比图5(c)和(d)可以看出,当电机稳定运行时,MTPA控制方法的三相电流的最大值分别为10 A和17 A。当采用id=0控制方法时,三相电流的最大值分别为10.5 A和20 A。由此可见,本文所提的控制方法在稳态运行时电机输出的电流更小,能耗更低,电机输出效率更高。
5 结语
為了满足实际内置式永磁同步电机伺服系统转矩输出大、速度响应快、抗干扰能力强、电机输出效率高等要求,本文提出将自适应滑模控制方法应用在最大转矩电流比的控制中。采用牛顿-拉夫逊迭代法分配最大转矩电流比所需的交直轴电流,简化了计算方法,提高了方法的工程应用价值。速度调节器采用滑动模态控制方法,并针对鲁棒切换项设计自适应增益函数,有效降低了滑模的抖振,提高了系统的稳定性。仿真实验结果表明,该系统鲁棒性强,具有良好的动态性能和抗扰动能力,适用于永磁同步电机伺服系统的多种场合。
[参考文献]
[1] 黄鹏,苗长云,黄雷,等.参数在线估算的永磁同步电机最大转矩电流比控制[J].煤炭学报,2011,36(1):172-176.
[2] 廖勇,伍泽东,刘刃.车用永磁同步电机的改进MTPA控制策略研究[J].电机与控制学报,2012,16(1):12-17.
[3] 崔家瑞,高江峰,张波,等.永磁同步电机滑模变结构鲁棒控制[J].电机与控制学报,2016,20(5):84-89.
[4] 高雅,刘卫国,骆光照.基于dSPACE的新型双滑模PMSM控制方法[J].中南大学学报(自然科学版),2015(6):2036-2043.
[5] 李鹏飞,严欣平,苏盈盈,等.基于永磁同步电机逆系统解耦模糊滑模控制[J].太阳能学报,2011,32(4):565-570.
[6] 李军,余家俊.基于分段曲线拟合的IPMSM最大转矩电流比控制研究[J].四川大学学报(工程科学版),2012,44(Z1):307-311.
[7] 谢涛,高桂革,王杰.基于滑模控制器的PMSM的矢量控制系统研究[J].电机与控制应用,2018,45(3):6-10.
收稿日期:2021-02-01
作者简介:葛晨阳(1994—),男,江苏兴化人,硕士研究生,助理工程师,研究方向:智能电网与控制技术。
