基于硬件在环仿真实现的纯跟踪轨迹控制
2021-04-19 13:26李玉东陈高俊
农机使用与维修 2021年4期
李玉东,李 爽,务 闯,陈高俊
(1.华北水利水电大学,郑州 450045;2.河南平高通用电气有限公司,河南 平顶山 467002)
0 引言
智能车辆是当下国内外汽车行业新技术研发的重要阵地,包括谷歌在内的全球各大互联网和科研机构以及高校院所争相研究的领域[1]。考虑到安全性和经济性,一般在仿真平台验证。本文将在搭建Ros+Carsim+Simulink硬件在环环境中进行纯轨迹跟踪的验证。
1 纯轨迹跟踪
纯轨迹跟踪将要追踪的轨迹简化成若干个追踪点,完成一系列点的追踪就完成了线的追踪。在实际分析中一般将四轮车简化为二轮自行车模型(图1),其关系如式(1)所示[3]
(1)
其中δ表示前轮的转角,L为轴距(Wheelbase),R则为在给定的转向角下后轴遵循着的圆的半径。circulararc表示后轮轨迹圆。
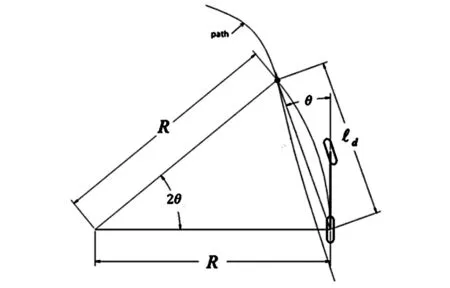
图1 汽车简化模型
需要控制车辆的后轴中心点经过要追踪的点,根据正弦定理,得

(2)
根据式(2)得出纯追踪控制算法控制量表达式
(3)
由式(3)即可得出到达目标点所需的前轮转角。只需要不断根据需要控制前轮转角就可以完成目标轨迹的跟踪。
2 仿真的搭建
2.1 仿真搭建概述
仿真的搭建需要两台电脑,分别为PC1、PC2。PC1搭载Linux程序运行Ros软件;PC2搭载Windows系统运行Simulink与Carsim。两台电脑由以太网进行连接,两台电脑连入共同的以太网设置相同的IP地址即可进行通信。
2.2 PC1电脑端的设置
首先要确定IP地址,打开隐藏文件.bachrc。在该文件末尾添加两行内容,export ROS_IP=“IP地址”,export ROS_MASTER_URI=http://IP地址:11311。
2.3 PC2端的设置
首先,建立一个空白的Simulink文件,放到Carsim的安装目录下,打开Carsim,在Datasets选项中找到Simulink and labVIEW Models,在Simulink and labVIEW Models选项下选择任一例子,复制此例子之后进行相应的设置。
对Procedure选项下的设置如下:(1)目标车速为0;(2)无制动;(3)挡位控制选用闭环AT5挡模式;(4)无转向;(5)路面选择为2 km2摩擦系数为2.0的方形路面;(6)设置仿真步长为0.001。仿真时间为50 s。
进入Run Control with Simulink后进行选项修改,在Simulink Model选择刚刚建立放到Carsim的安装目录下的空白Simulink文档,进入Import Channel选型设置输入量,进入Export Channel设置输出量。
Import Channels设置为:(1)IMP_SPEED;(2)IMP_STEER_SW。Export Channels设置为:(1)Xo;(2)Yo;(3)Yaw;(4)Vx。
设置完这些就可以回到主界面点击Send to Simulink,之后就会打开空白Simulink,搭载如图模型,如图2所示。
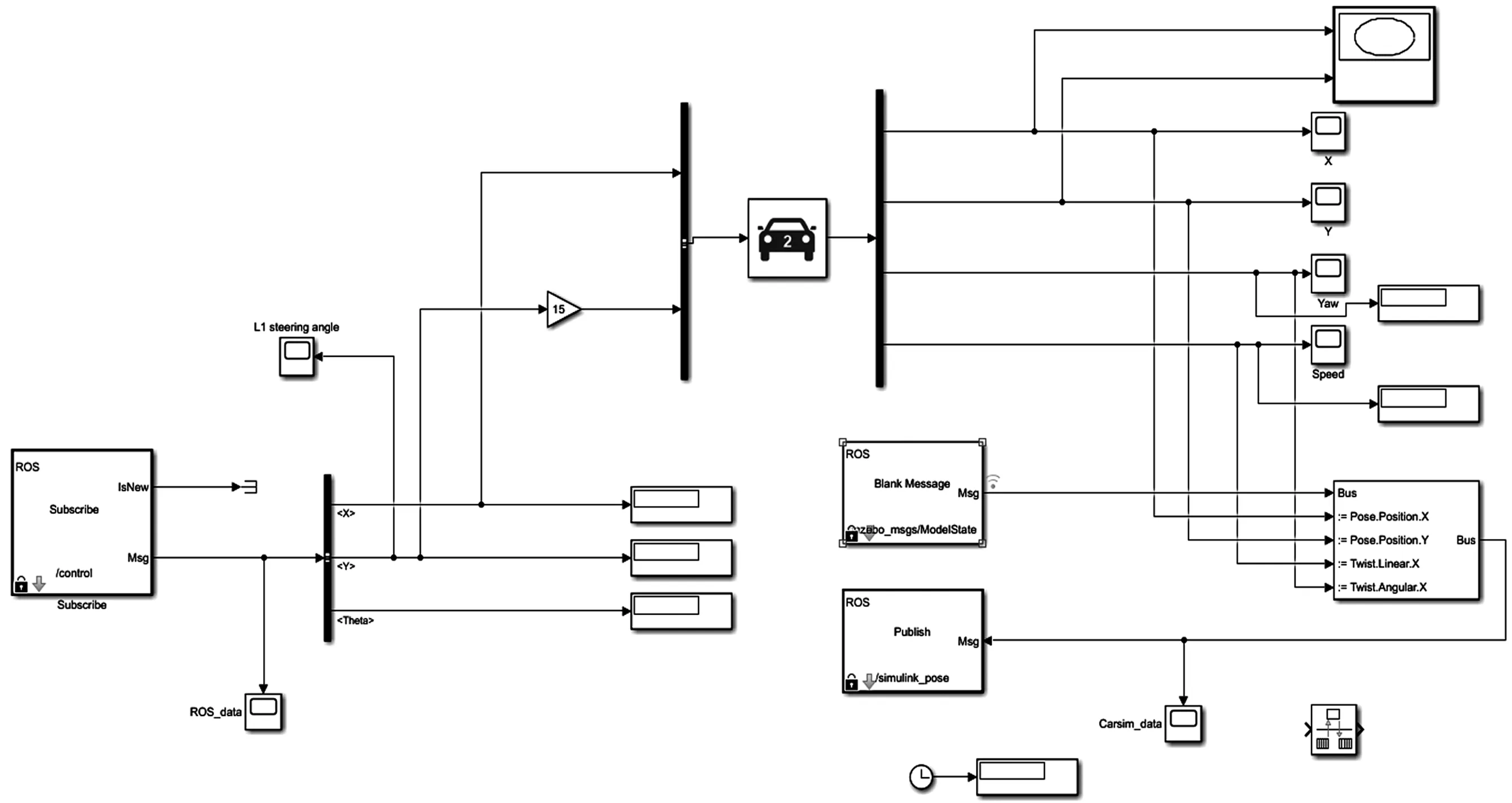
图2 Simulink模型搭建
对Subscribe、publish分别进行合适需要的设置,设置完成后Simulink端的IP地址替换为在PC1输入的IP地址。
3 实验结果
为验证本文提出的仿真平台的有效性以及与其他方法的优越性,本文进行了计算机仿真硬件在环实验。实验的车辆模型采用Carsim内置的高精度车辆动力学模型,控制算法采用纯跟踪理论算法。图3显示车辆轨迹按照预先设计的目标轨迹进行寻迹,偏差较小,略有偏差。
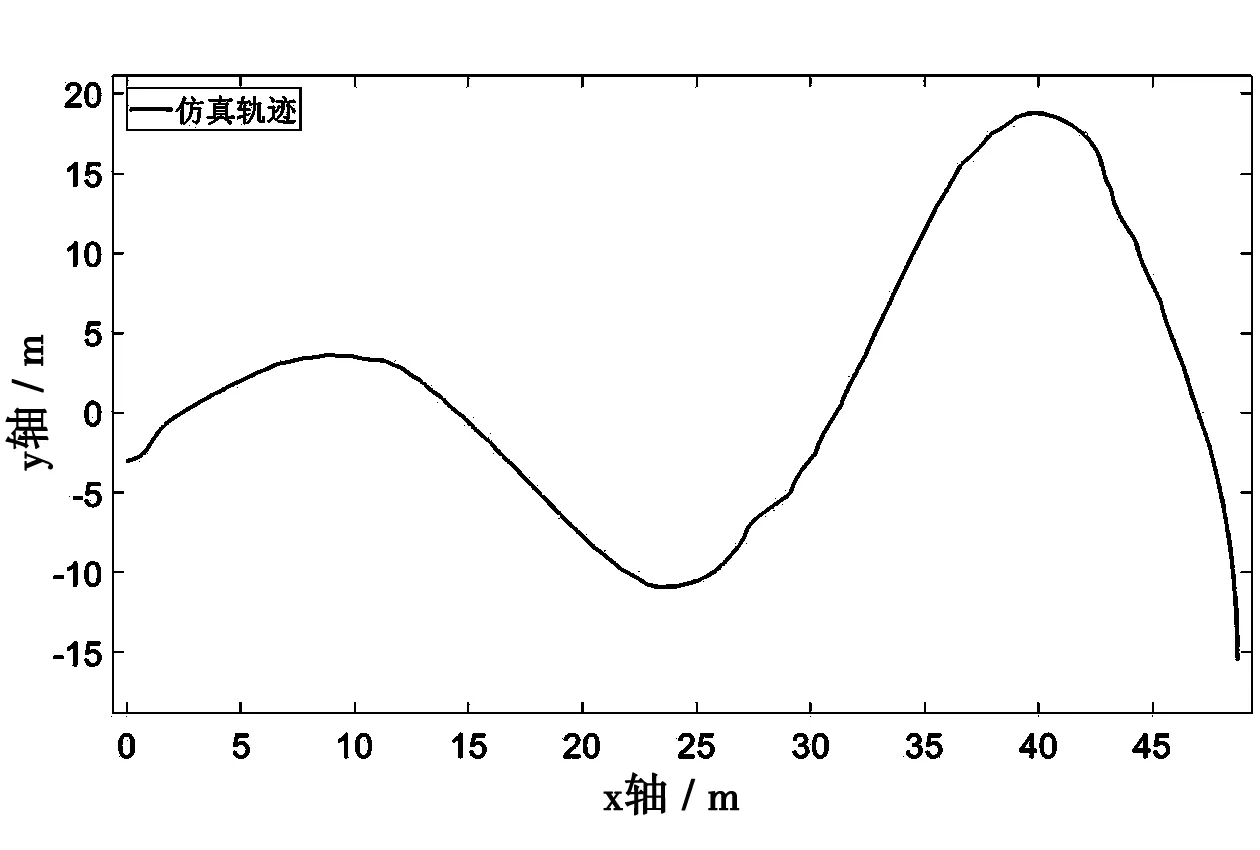
图3 仿真轨迹
4 结语
本文对自动驾驶硬件在环仿真实验模型进行了改进后搭建,然后利用纯跟踪算法对实验平台进行了验证,实验结果中设计轨迹与真实轨迹吻合度较高,即该仿真平台可以作为轨迹跟踪实验的实验平台。
(04)
猜你喜欢
装备制造技术(2021年4期)2021-08-05
铁道通信信号(2020年11期)2020-02-07
网络安全和信息化(2018年3期)2018-03-03
时代英语·高一(2017年5期)2017-11-14
时代英语·高三(2017年4期)2017-08-11
时代英语·高一(2017年4期)2017-08-09
黑龙江电力(2017年1期)2017-05-17
科学中国人(2017年14期)2017-01-28
试题与研究·中考英语(2016年3期)2017-01-05
红蜻蜓·低年级(2015年11期)2016-02-02