舰船雷达与AIS 信息融合技术
2021-04-10 04:13:20杨淑洁
舰船科学技术 2021年2期
杨淑洁,孙 伟,卢 威,王 帅,周 杨
(浙江海洋大学 海洋工程装备学院,浙江 舟山 316022)
0 引 言
随着海运事业的发展,船舶的吨位、数量以及水域交通密度都在不断增加,对船运监管、船舶安全提出了新的挑战。这些挑战也推动了船舶信息化与智能化的发展,海上通信导航设备的种类和性能都在不断增加、提高。雷达和自动识别系统(Automatic Identification System,AIS)是当下船上配备最多的导航设备,而且二者的信息具有一定的互补性和冗余性[1],将雷达和AIS 的信息进行融合,有利于改善船舶对周围障碍物的探测性能、提高船舶导航信息的精度和可靠性,是未来船舶导航技术发展的重要方向。
1 雷达/AIS 信息融合技术概述
1.1 雷达和AIS 的数据特点
雷达是主动式传感器,发送信号、接收和处理返送回来的信号,不能接收其他雷达的信号[2]。雷达可以对运动和静止的目标进行跟踪勘测,提供距离、方位、航速、航向等信息,并估计其大小和形状。但雷达存在盲区,同时回波容易受到天气、海况以及地形遮挡等影响,造成雷达目标分辨力不强、显示虚假目标等问题。此外雷达在多目标密集区域容易出现误跟踪和目标丢失现象[3]。
AIS 的出现弥补了雷达的缺陷,它是被动式传感器,通过接收AIS 信号获取目标船舶的位置、航向、航速等动态信息,呼号、船名、船舶类型等静态信息,以及航次相关信息和安全信息[4]。相较于雷达,AIS 的导航精度高,目标信息丰富,而且AIS 不易受位置、天气等因素的影响,不会出现误跟踪和跟踪丢失的情况[3]。但是,AIS 只能工作在甚高频(Very High Frequency,VHF),且无法识别没有安装AIS 设备的目标[5]。
雷达和AIS 具有各种的优缺点,二者的信号具有冗余互补性如图1 所示。
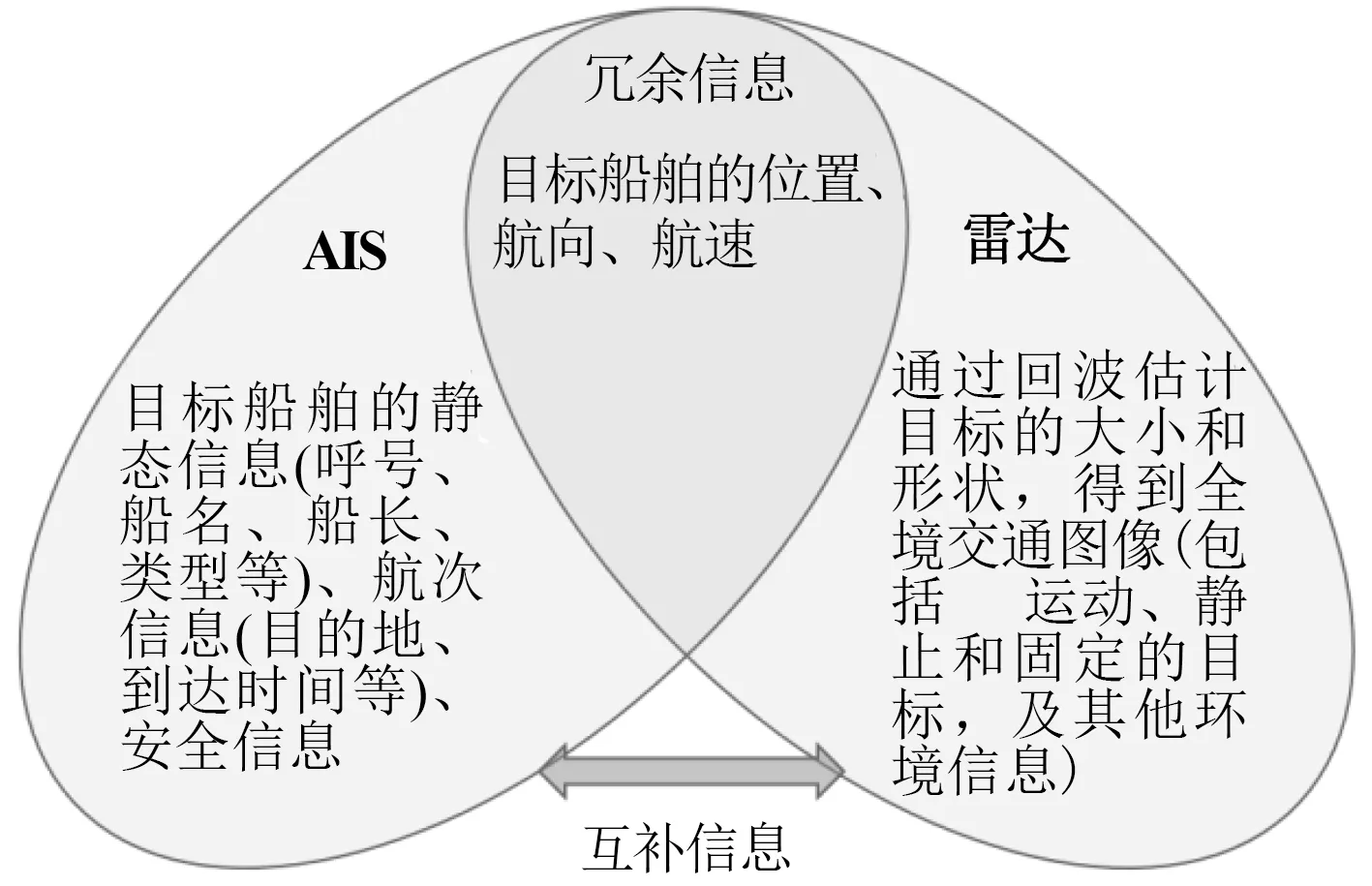
图1 雷达与AIS 信息的冗余互补性示意图Fig. 1 Redundancy and complementarity of radar and AIS information
1.2 信息融合的模式
如前所述,雷达与AIS 的信息具有一定的互补性,将二者融合可以取长补短,提高船舶导航系统的性能。现有的研究成果中,雷达和AIS 信息融合的模式可分为集中式、分布式和混合式[6-8],其流程图如图2 所示。
1.2.1 集中式融合
在对信息融合处理前,为了提高信号的质量要对雷达和AIS 的原始数据进行预处理,主要包括去除野值、点迹过滤、点迹合并。然后雷达与AIS 数据被直接送到数据融合中心,在融合中心进行时空对准、航迹关联、航迹融合,最终得到目标状态,集中式融合模式的流程如图2(a)所示。集中式融合具有信息损失小、跟踪精度高的特点,但由于数据量大,对系统的运行容量、传输宽带要求高,而且计算速度较慢。
1.2.2 分布式融合
如图2(b)所示,在分布式融合模式中,经过预处理的雷达与AIS 数据在进入信息融合中心之前,先对自身数据去除冗余信息、缩小数据范围,得到局部多目标跟踪航迹,然后将其传送到数据融合中心,由数据融合中心完成航迹关联和融合,最终得到目标航迹状态。分布式融合模式输到融合中心的数据量明显减少,降低了对系统运行容量、传输宽带的要求,计算速度快,但信息损失也使得精度也有所降低。
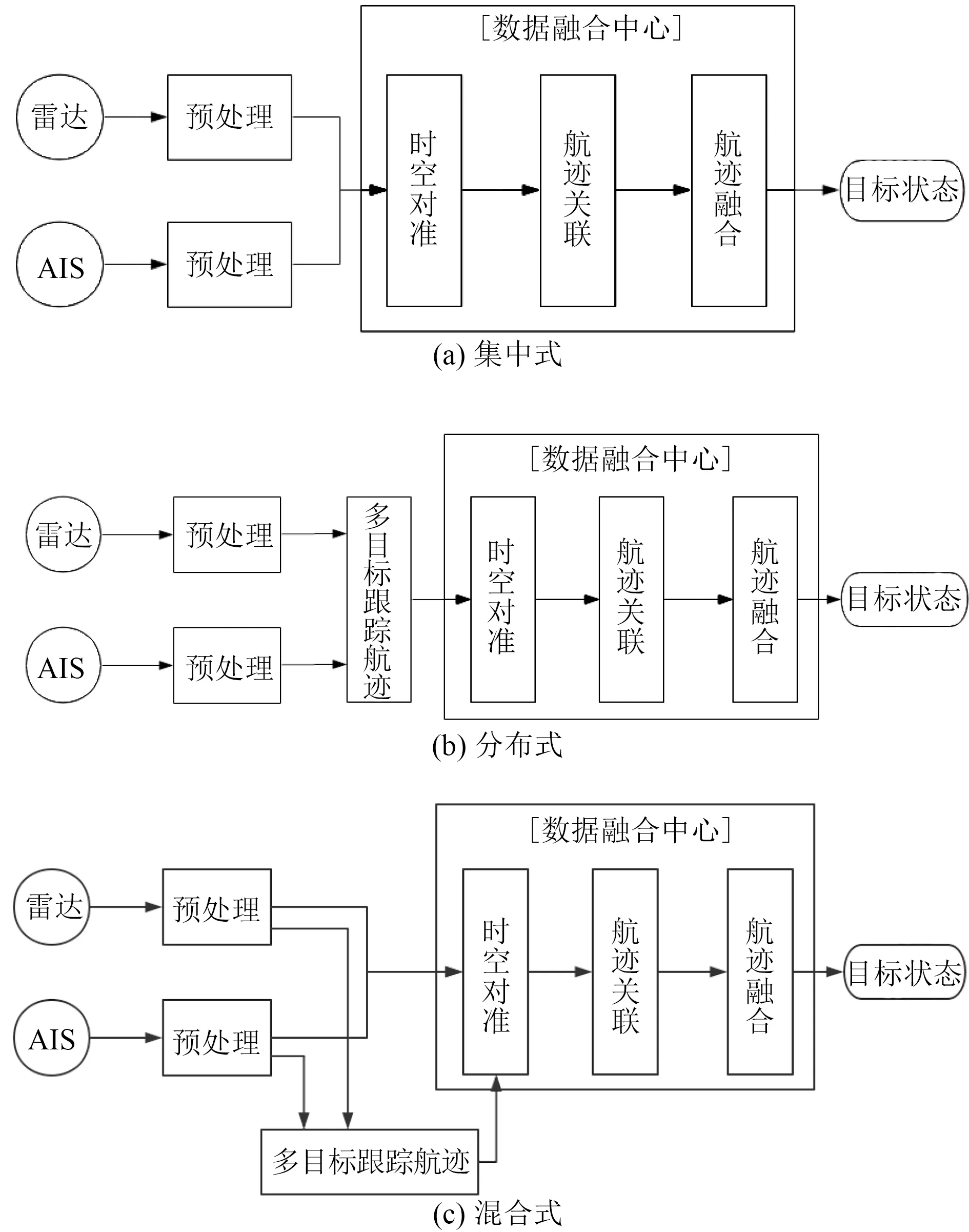
图2 雷达和AIS 信息融合模式Fig. 2 Radar and AIS information fusion models
雷达与AIS 都有各自独立的信息处理系统,所以分布式融合模式在没有增加系统复杂度的情况下提高了系统的实时性和可靠性,因此在实际中通常采用分布式模式。
1.2.3 混合式融合
如图2(c)所示,混合式融合结合了集中式和分布式的融合特点,即融合中心同时接收会接收雷达与AIS 数据和经局部处理的多目标跟踪航迹。混合式融合兼有以上2 种融合结构的优点,具有精度高,数据利用率高的特点,但传输数据量大,系统结构复杂、造价昂贵。
2 雷达/AIS 信息融合关键技术
2.1 信息准备
雷达和AIS 输出异构数据,信息融合前要进行信息的准备,实现坐标和时间统一。信息准备主要包括坐标变换和时间对准。
2.1.1 坐标变换
雷达使用以雷达为中心的极坐标系,目标位置数据是用极坐标 (R,θ)表示;AIS 检测的目标位置用WGS-84 地理坐标 (L,B)表示。为了实现坐标统一,需要选取系统坐标系,并将雷达和AIS 的数据变换到系统坐标系。常用的坐标变换方法有3 种:一是以雷达的极坐标为系统坐标系[9],二是以本船为原点的直角坐标系为系统坐标系[10],三是以地心坐标系为系统坐标系[11]。其中,第2 种方法具有计算简单、精度高的特点,有利于海量数据的快速处理和后续航迹融合,因此被广泛用于雷达、AIS 信息坐标变换,下面介绍其具体变换过程。
如图3 所示,系统坐标系的原点Oz为本船位置,Xz轴、Yz轴分别指向东经和北纬方向。Ma和Mr分别AIS 与雷达探测到的目标,获取的坐标分别为 (R,θ)和(L,B)。坐标变换就是要得到这2 个目标在系统坐标系中的坐标值 (xa,ya) 和(xr,yr)。
Michael Mauer:创新的先决条件是在现实与可能性中进行思考,所以设计师既可以发散思维,也可将思维汇聚一起;他们是非传统的横向思考者,也是有着明确目标的长远思考者。基本上,设计师需要预知不明确的未来,并最大限度发挥自身的即兴创作能力。在我看来,设计师即能让工作变得理性,又能充满感性地发挥自己所擅长的本领来进行设计。
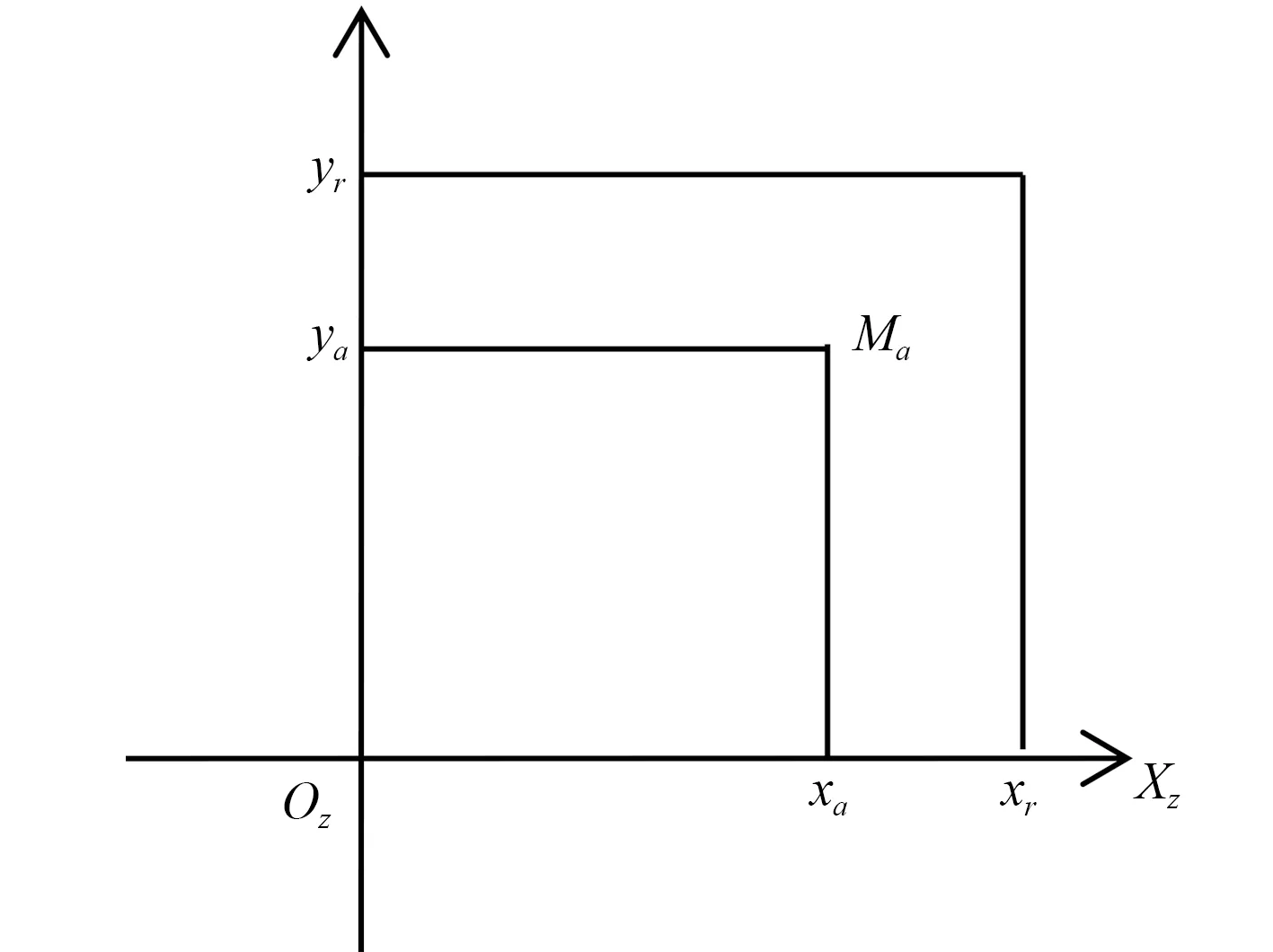
图3 以本船为原点的直角坐标系Fig. 3 Cartesian coordinate system with own ship as origin
1)雷达目标位置数据的坐标转换
雷达数据的坐标原点为雷达,不失一般性可假设与本船位于同一点。因此,雷达探测目标的极坐标(R,θ) 转换到系统坐标系,得到点Mr的直角坐标[12-13]:

2)AIS 目标位置数据的坐标转换
为了将AIS 目标的坐标转换到系统坐标系,要先将WGS-84 坐标系下的坐标转换到直角坐标系下,主要有高斯-克吕格投影和墨卡托投影2 种方法[10-12]。高斯-克吕格投影是一种等角横切椭圆柱投影。利用高斯-克吕格方法投影时中央经线不会发生变形、计算精度高[14-15]。墨卡托投影是一种正轴等角圆柱投影。墨卡托方法在投影过程中经纬线均为直线,使得投影图像更为直观,而且该方法公式结构简单,计算量小[16-17]。
通过上述2 种投影方法得到本船与目标船舶的直角坐标后,再用目标船舶坐标减去本船坐标,就可以得到目标船舶相对于本船的位置信息,也就是目标船舶在系统坐标系中的坐标 (xa,ya)。
2.1.2 时间对准
雷达的扫描周期为2~4 s,AIS 为2~3 min[17],加上信息传输存在延迟,二者的信息是不同步的。而异类传感器进行信息融合时必须进行时间对准。进行时间对准,必须要保证雷达与AIS 数据的起始时间相同。由于雷达的扫描周期是比较固定的,而AIS 的数据周期会随船舶的状态发生变化,因此一般将雷达的采样时刻作为时间对准的起始时间基准。
国内外学者提出了许多时间对准的方法,常用的有内插法、三次样条插值法、最近邻规则中心聚类法[18-21]。内插法简单易行,执行效率高,但是在利用内插法进行时间对准时需要假设船舶是匀速直线运动,这与海上航行船舶的实际状态不符。当目标船舶处于机动状态时,三次样条差值的精度比内插法高,但是计算较为复杂。而最近邻规则中心聚类法与上述2 种方法相比,计算就更为简单、快速,但是,对雷达的数据进行配准时,明显不如三次样条插值法[10]。
2.2 航迹关联
国内外学者提出的航迹关联算法分主要有两大类:一种是基于统计的方法,包括距离-速度航迹关联算法[4]、最近邻 (NN)航迹关联算法[22]、修正的近邻域(MK−NN)算法[23]、加权法[24]、修正法[25]等;另一种是基于模糊数学的方法,包括模糊双门限法[26]、基于多因素模糊综合决策的航迹关联算法[16]、基于神经网络算法[27]、柯西型隶属度函数法[28]、模糊C均值聚类算法[29]等。
文献[4]研究了距离-速度综合细关联算法,易于工程实现,正确关联的概率较高。刘社[16]提出了基于历史航迹的航迹关联算法,简化了距离较近的航迹间的关联问题,但是未考虑对于相距较远的航迹关联问题。文献[10]采用了多因素模糊综合决策的航迹关联算法,在对雷达和AIS 进行T−D航迹粗关联后在进行模糊综合决策关联,该算法提高了航迹信息处理的效率,使航迹融合的整体性能提高,但是计算量较大。张景鹏等[9,30]采用多因素模糊-灰色关联综合的自适应阈值关联算法,提高了计算效率和算法质量,减少计算量,但是算法的实现比较复杂。文献[27]采用基于神经网络的航迹关联算法,主要解决密集、交叉及机动情况下的多目标航迹关联问题。夏光帅[22]提出了一种基于图和灰色理论的多传感器航迹关联算法,可以滤除与目标航迹无关航迹,提高航迹关联的效率。
2.3 航迹信息融合
为了使获得的航迹信息更加精确可靠,需要将来自航迹关联检验确定为同一目标的航迹信息进行航迹融合处理。目前,雷达和AIS 目标航迹融合的算法主要有神经网络算法[11]、卡尔曼滤波法[31]、加权平均融合算法[32-33]、加权协方差航迹融合算法[10]和自适应加权航迹融合算法[4,20]。
文献[16, 34]提出了一种基于航迹质量的自适应加权航迹融合算法,仿真结果表明融合后的系统航迹比单一航迹的具有更好的质量和可靠性。刘丽娜[4]采用了改进的自适应加权航迹融合算法,提高了航迹融合的精度,使融合后的航迹更加接近于真实运动轨迹。王晨曦[10]提出了改进的基于加权协方差航迹融合算法,分别针对航迹距离较近与较远时的算法进行改进,降低了航迹融合算法的复杂程度并提高了运算效率。文献[33]采用基于最小方差原则的统计加权平均算法进行雷达和AIS 航迹融合,融合后的航迹目标信息更加接近真实目标航迹。刘加欢[23]提出了一种基于修正的卡尔曼滤波的航迹融合算法,该算法在融合航迹的同时还具有平滑滤波的效果。文献[9]采用一种最优加权因子自适应加权航迹融合算法,提高了航迹融合的精度,但计算较复杂。
3 雷达与AIS 的信息融合的研究展望
国内外学者对雷达与AIS 信息融合的研究已经取得了一定进展,但是仍有许多问题有待于进一步研究。
3.1 目标密集环境下的航迹融合
目标密集环境下的航迹融合问题是一个具有挑战性的课题,在目标密集环境下,被探测的目标数量很多,且目标运动方式复杂多变。在信息容量巨大、信息之间的关系复杂的情况下,有许多挑战性的问题有待解决,如目标密集和航迹交叉环境下的关联正确率低、传感器开机时机及采样周期不同导致的航迹信息异步不等速率等问题,对航迹关联性能的影响;多目标跟踪与航迹关联的联合优化问题;系统误差对状态估计和航迹关联的影响等。
3.2 信息融合处理算法
雷达与AIS 的信息融合也有很多问题需要解决,如现有算法计算量大,不利于工程实现;只对算法进行了仿真分析,并未用大量实际数据进行验证;在神经网络与模糊理论方面的研究还比较少等问题。
3.3 智能化自动避碰系统
随着人工智能技术的不断发展和计算机技术水平的不断提高,研究基于AIS/雷达信息融合的集成化、智能化自动避碰系统,利用AIS 与雷达信息实现船舶目标识别跟踪、进行智能自动避碰决策,是今后减少或避免海上碰撞事故发生的重要研究方向。
4 结 语
本文对雷达与AIS 信息融合技术进行了系统的阐述,包括雷达、AIS 信息特点比较、信息融合模式与关键技术发展情况的概述,重点阐述了航迹关联和信息融合2 项关键技术的研究现状。在此基础上,从目标密集环境下的航迹融合和信息融合处理算法2 个方面分析了目前雷达与AIS 信息融合研究领域存在的主要问题,展望了雷达与AIS 信息融合技术在智能化自动避碰领域的发展前景。
猜你喜欢
青年歌声(2019年12期)2019-12-17 06:32:32
当代陕西(2019年15期)2019-09-02 01:52:00
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
学苑创造·A版(2018年11期)2018-02-01 06:29:20
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
中等数学(2017年2期)2017-06-01 12:21:50
读者(2017年5期)2017-02-15 18:04:18
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
舰船科学技术(2015年8期)2015-02-27 15:38:47