
基于CEEMDAN的GNSS变形监测去噪方法
2021-04-09 01:51:28李垠健
大地测量与地球动力学 2021年4期
汤 俊 李垠健 高 鑫
1 华东交通大学土木建筑学院,南昌市双港东大街808号,330013 2 华东交通大学土木工程国家实验教学示范中心,南昌市双港东大街808号,330013
GNSS变形监测具有测站间无需通视和全天候自动观测等优点[1],被广泛应用于工程结构的健康监测。由于数据采集过程中易受天气、树木遮挡、多路径效应等多种因素影响,GNSS变形序列中常包含测量噪声,这些噪声会严重影响测量精度,导致监测物的变形信息不准确。因此,有必要对监测数据进行滤波处理。常见的变形监测数据滤波方法有小波去噪[2-3]、Kalman滤波[4]、经验模态分解[5-8](empirical mode decomposition, EMD)等。GNSS变形监测受背景噪声影响具有非平稳、高频率、重复性强等特点,EMD及其改进方法在处理该类信号时具有明显优势。本文针对EMD分解中的噪声传递以及真实信号缺失等问题,提出基于EMD的改进方法——CEEMDAN,在分解过程中加入有限次自适应白噪声,可有效避免模态混叠和信号失真。通过比较CEEMDAN、EMD和小波去噪方法的去噪效果,利用仿真数据与GNSS边坡实测监测数据进行实验分析,验证该方法的有效性和可靠性。
1 CEEMDAN方法构建
1.1 CEEMDAN原理
EMD在构建包络线时使用三次样条法,无法判断信号两端是否为极值点,所以会产生端点效应。在分解过程中,EMD采取递归分解,在频率尺度不连续时,无法正确分离不同尺度的信号,从而造成模态混叠现象。针对该问题,EEMD分解时在序列中间断加入高斯白噪声,由于白噪声具有均值为0的特点,因此在加入数量足够多的情况下白噪声会相互抵消,从而在一定程度上避免模态混叠问题,但分解后的单个IMF仍存在残余噪声,导致残余噪声在高阶IMF和低阶IMF中传递。
CEEMDAN算法是在EEMD基础上发展而来的,针对EEMD分解过程中的噪声传递问题,CEEMDAN在各个分解阶段添加自适应高斯白噪声,得到模态分量后立即进行加总平均计算,同时在后续分解中执行同样操作。该算法可实现在较少的平均次数下,保证重构误差为0,从而有效避免噪声传递的问题。 CEEMDAN方法的具体步骤如下:
1) 在原始信号x(t)中添加I组均值为0的自适应白噪声ωi(t),第i次信号可表示为:
xi(t)=x(t)+ωi(t)
(1)
式中,i为实验次数1,2,…,I。采用EMD算法对xi(t)进行分解,得到第1个模态分量,然后立即对其进行加总平均计算,得到:
(2)
将原始信号减第1个模态分量得到残余分量:
r1=x(t)-IMF1
(3)
2) 求解第2阶模态分量IMF2,在残余分量r1中继续加入白噪声ωi(t),构成新的待分解信号:
R1(t)=r1(t)+ωi(t)
(4)
进行i次实验(i=1,2,…,I),然后对R1(t)进行EMD分解,得到第2个模态分量:
(5)
残余分量可表示为:
r2=x(t)-IMF2
(6)
3) 重复执行步骤1)和2),直到信号不能再被分解,即信号单调为止,从而得到k个IMF,信号x(t)可表示为:
(7)
1.2 排列熵
排列熵(permutation entropy, PE)[9]、样本熵和模糊熵等概念相同,是衡量时间序列复杂程度的指标,在计算子序列之间复杂程度的同时可引入排列的思想。排列熵具有运算效率高、抗干扰能力强、输出结果简洁等优点,适用于非线性、不规则的信号,对区分IMF频率具有很好的适用性。时间序列越规则,其值越小;时间序列越复杂,即包含噪声越多,其值越大。计算排列熵的基本步骤如下:
1) 设时间长度为N的时间序列X(1),X(2),…,X(n),重构时间序列,每个子序列以x(i)表示,得到以下序列矩阵:
(8)
式中,m为嵌入维数,λ为时间延迟,j=1,2,…,k。
2) 将矩阵中每一行元素组成向量,按升序排列,即
X(i)={x(i+(j1-1)λ)≤x(i+(j2-1)λ)
≤…≤x(i+(jm-1)λ)}
(9)
如果其中有2项相等,则按照ji的下标i进行排序,得到新的符号序列:
S(l)=(j1,j2,…,jm)
(10)
式中,l=1,2,…,k,共产生m!种不同排列,即所有m维子序列X(i)都被映射到m!种不同排列中。
3) 计算所有符号的概率分布,用Pj表示,时间序列的排列熵可表示为:
(11)

HP=H(m)/ln(m!)
(12)
式中,Hp的取值范围为[0,1]。模糊隶属度为模糊集合中研究对象介于0~1之间的某个值,使用模糊隶属度区分高低频分量可得到较为合理的结果。本文基于IMF的特点,经过大量实验,参考文献[10]将PE值的模糊隶属度设定为0.6。当时间序列PE值大于0.6时,可认为是包含噪声的高频信号;PE值小于0.6时,则看作干净信号。计算每一个IMF的PE值,可以筛选出低频信号进行重构。
1.3 CEEMDAN去噪方法
使用CEEMDAN将原始信号分解为不同频率的IMF分量,可避免EMD模态混叠和端点效应问题,分解得到的IMF分量能更清晰地表达自身特征。根据GNSS变形监测序列噪声高频率、周日重复的特点,可认为噪声主要存在于高频分量中,如果直接舍弃则可能丧失其中的真实信息。本文方法对高频分量继续进行小波去噪,使高频分量中的低频信息能得到很好地保留。首先需要找出高频分量与低频分量的分界点K,常用方法有相关系数法、标准化模量累计均值法、平均周期与能量密度乘积法等。本文根据IMF的特性,引入排列熵的概念来区分高频噪声,计算每个IMF的PE值;然后筛选出高频分量,并将其看作噪声信号,将低频分量看作干净信号;对高频分量继续采用小波分析的方法进行去噪,同时对去噪后的高频分量与干净信号进行重构,得到去噪后的信号。具体步骤见图1。

图1 CEEMDAN方法流程Fig.1 Flow diagram of CEEMDAN method
2 仿真实验
为验证本文方法的有效性,构造模拟变形信号对本文方法进行实验。模拟信号由3个正弦函数叠加组成,在该信号的基础上加入高斯白噪声,其函数为:
yt=4sin(2πt/1 000)·sin(2πt/400)+
2sin(2πt/600)+sin(2πt/300)+noise
(13)
式中,noise是信噪比为2 dB的高斯白噪声,采样数为3 000,采样间隔1 s,仿真信号及加噪后信号如图2所示。
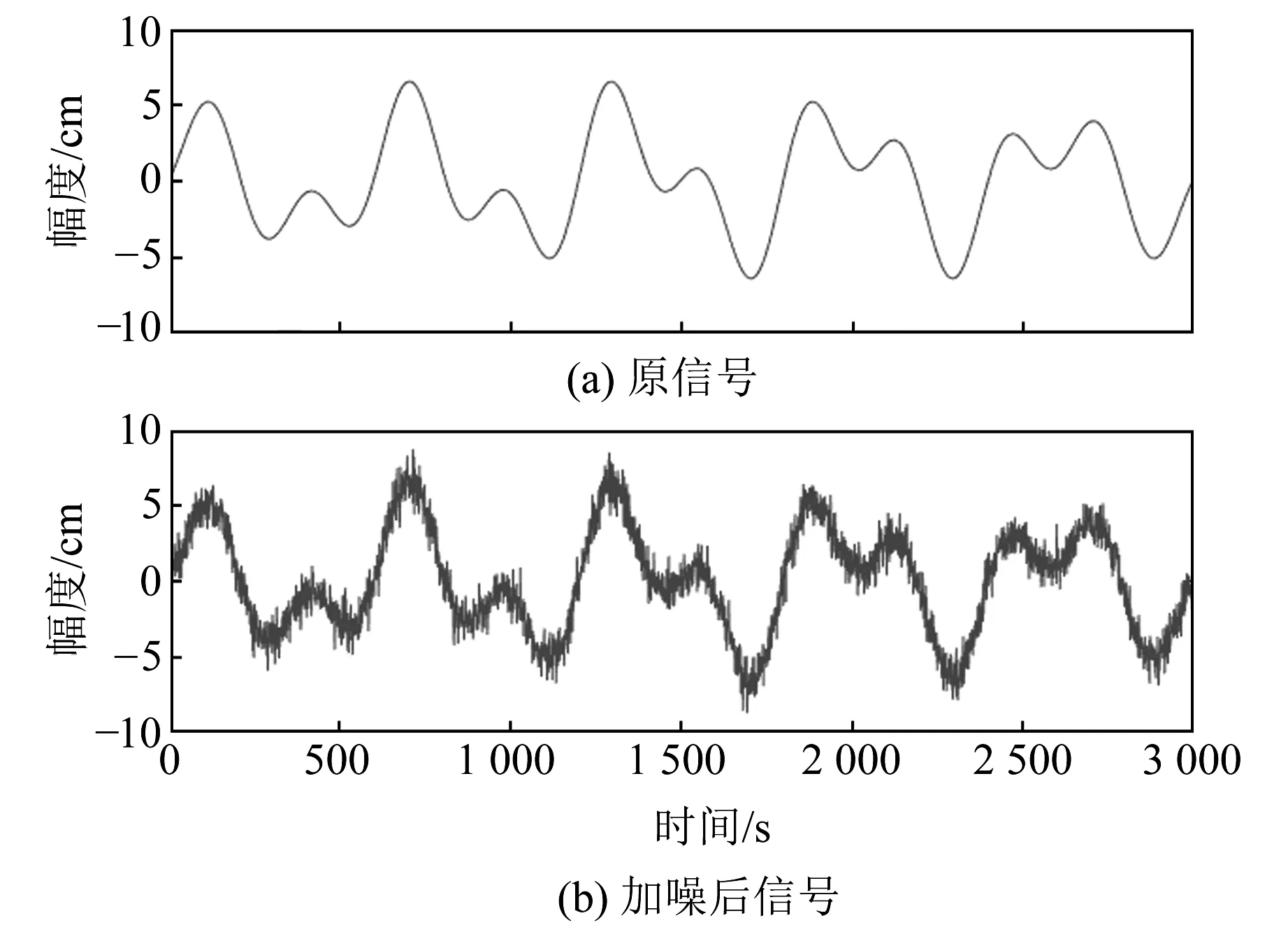
图2 仿真信号序列Fig.2 Simulation signal sequence diagram
采用CEEMDAN算法对加噪后信号进行分解,得到11个IMF分量和1个残余项,各IMF分量如图3所示。从图中可以看出,随着分解次数的增加,信号越来越平滑,表明高斯白噪声主要分布在高频分量上。

图3 基于CEEMDAN方法的分解图Fig.3 Decomposition diagram based on CEEMDAN method
利用排列熵理论确定高频噪声,计算各IMF分量的PE值,结果见表1。由表1可知,前3个IMF分量的PE值大于0.6,可将其看作高频噪声,使用小波变换进行去噪处理。经过多次实验,小波基选择去噪效果较好的db7小波,分解层数为3,选取Heursure(启发式阈值)进行软阈值处理。将去噪后的分量与第4~11个低频分量和残余项进行重构,得到去噪后信号。

表1 各IMF分量排列熵
为验证CEEMDAN方法的去噪效果,对原始信号分别采用小波去噪、EMD、CEEMDAN方法进行去噪,利用信噪比、均方根误差和相关系数3个指标评价去噪效果:
(14)
(15)
(16)
式中,SNR为信噪比,RMSE为均方根误差,R为相关系数,s(i)为原始信号,s′(i)为去噪后信号,L为信号长度。具体去噪效果见表2,从表中可以看出,小波去噪和EMD方法均能起到一定的去噪效果。与之相比,CEEMDAN方法去噪后的信噪比、相关系数均有所提升,均方误差有所降低,表明本文方法具有有效性。

表2 仿真数据去噪效果对比
3 实测数据分析
为进一步验证该方法的可靠性,利用某边坡GNSS变形监测数据进行实验分析。该边坡布设0001、0007、J001、J002共4个监测点,采样频率为1 Hz。实验利用09-01~11-30共91 d的监测数据,选取间隔1 h,截取2 000个历元进行去噪处理。由于篇幅所限,仅展示0001监测点的去噪结果,原始序列和去噪后序列如图4所示,表3为0001监测点N、E、U方向3种去噪方法的效果对比。

图4 实测数据去噪效果Fig.4 Denoising effect of measured data

表3 实测数据降噪效果对比
从图4和表3可以看出,原始监测序列局部呈不平稳态势,具有很大随机性,说明其受到很大的噪声污染。通过分析3个方向的信噪比和相关系数可知,新方法与小波去噪方法相比,信噪比分别提高7.41%、3.15%和6.22%,相关系数分别提高19.6%、27.34%和23.13%;与EMD方法相比,信噪比分别提高6.86%、2.31%和5.97%,相关系数分别提高16.67%、15.64%和21.22%,表明新方法相比于传统方法可提取更多的变形量,与原始序列更接近。从均方根误差来看,3个方向上,新方法与小波去噪方法相比分别减少47.37%、36%和40%,与EMD方法相比分别减少6.86%、2.31%和5.97%,表明新方法的去噪效果更稳定,能更清晰地表达变形趋势。
4 结 语
本文构建了一种自适应完备集合经验模态分解的去噪方法,引入排列熵理论确定高低频分界值K。该方法结合多种方法的优点,可有效解决EMD分析的端点效应和模态混叠问题,通过排列熵理论准确划分高低频,对高频噪声进行精细处理,使其GNSS变形监测的真实信息得到有效保留。仿真和实测数据实验表明,CEEMDAN方法的去噪精度显著优于EMD和小波去噪方法,证明了其有效性和可靠性。
猜你喜欢
科技风(2021年19期)2021-09-07 14:04:29
基层中医药(2021年12期)2021-06-05 06:56:26
电子制作(2019年13期)2020-01-14 03:15:32
智族GQ(2019年9期)2019-10-28 08:16:21
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
英美文学研究论丛(2018年1期)2018-08-16 03:00:06
电子测试(2018年11期)2018-06-26 05:56:02
雷达学报(2017年3期)2018-01-19 02:01:27
制造技术与机床(2017年10期)2017-11-28 05:20:43
纺织科学研究(2017年6期)2017-07-03 12:14:15
