
基于人在回路的直升机着舰控制律设计与仿真
2021-04-08 03:20贾新强张松黄飞飞
航空科学技术 2021年1期
贾新强 张松 黄飞飞
摘要:有人直升机精确着舰是亟待解决的一项技术难题。面向着舰任务需求,本文构建了人机一体式仿真模型,选取典型着舰任务科目基元(MTE)。人机仿真模型包括驾驶员模型、直升机飞行动力学仿真模型、不同构型下直升机飞行控制律以及包括舰面环境综合仿真模型。上述模型在统一的仿真空间内定义并互相进行交联,可有效地对着舰任务中的人机闭环系统进行模拟。基于上述仿真模型,进行了人在回路试验仿真,结果表明响应类型平移速率(TRC)可以有效地提升有人直升机着舰任务成功率,这对着舰控制律的设计具有显著的意义。
关键词:直升机控制;控制律设计;响应类型;舰面环境建模;人机闭环仿真
中图分类号:V219文献标识码:ADOI:10.19452/j.issn1007-5453.2021.01.009
传统的有人驾驶直升机在着舰任务中操纵负担较大。舰面上方的尾流干扰、舰船甲板扰动、直升机地效、海浪环境下能见度降低等多种不利因素的叠加,使得着舰风险难以把控。因此,在直升机飞控系统的设计过程中需要对着舰任务科目的各个环节进行完善的仿真分析与性能评估,确保在真实着舰场景中飞行员操纵负荷与直升机运动状态风险可控。目前,已经有较多关于舰载状态下的飞控闭环仿真研究,以确保直升机在复杂环境中较好的姿态与速度响应。对于飞行员驾驶模型,将飞行员操纵时间、操纵指令及操纵精度等因素加入到直升机飞控系统中,形成人-机-环境闭环系统[1];对于舰艉流仿真模型,参考“黑鹰”直升机的试验结果,认为舰艉流作用在直升机旋翼上,改变了桨距的实际数值;对于舰船模型,采用了5级海况下诺克斯级护卫舰的正弦波叠加模型的数学模型。通过以上各种仿真模块的综合,可以逐渐形成完善的人-机-舰综合闭环仿真系统。
为了达到更高的飞行品质和降低飞行员驾驶负担,本文在综合了着舰各部分仿真模块的基础上对比了以不同响应类型为核心的控制算法。仿真结果表明,相较于角速率指令响应类型(RC)和带姿态保持的姿态指令响应类型(ACAH),平移速率响应类型(TRC)能够更加柔和而精确地控制直升机姿态与速度响应[2-3],有效提升有人直升机着舰任务成功率。具体的仿真建模技术分为以下5个部分:(1)飞行员神经运动模型;(2)甲板风场模型;(3)基于TRC响应类型的模型跟随控制算法;(4)直升机运动模型;(5)着舰仿真验证环境。图1为该系统仿真模型结构图。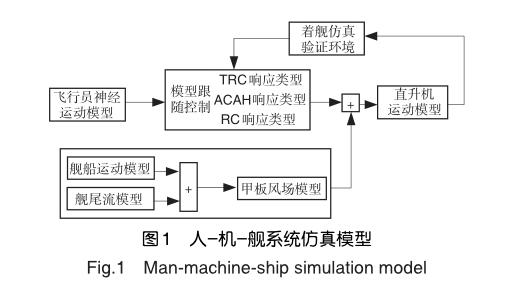
1直升机动力学模型
直升机数学模型使用9阶线性状态空间模型[4],具体如下: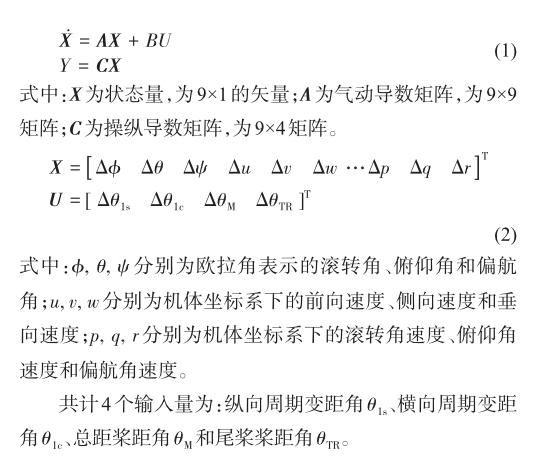
2直升机飞行控制律设计
大多数直升机是RC响应类型,即指令输入对应角速度,在此不再赘述。为了在俯仰轴和滚转轴、稳定直升机运动状态,飞行员在达到期望俯仰角时必须反向操纵驾驶杆,而这种控制方式在不良目视环境下非常危险。为了克服这一问题,ADS-33E提出了在不良目视环境下要求满足更高等级的响应类型。当目视条件降级为一般目视环境时,响应类型应从RC变化为ACAH响应类型,此时UCE=2(一般目视环境);当响应类型继续降级到UCE=3(不良目视环境)时,响应类型应从ACAH切换到TRC响应类型。这种设计要求为直升机提供了更好的稳定性,通过减少飞行员反复操纵实现降低操纵负担的目的。
2.1 ACAH响应类型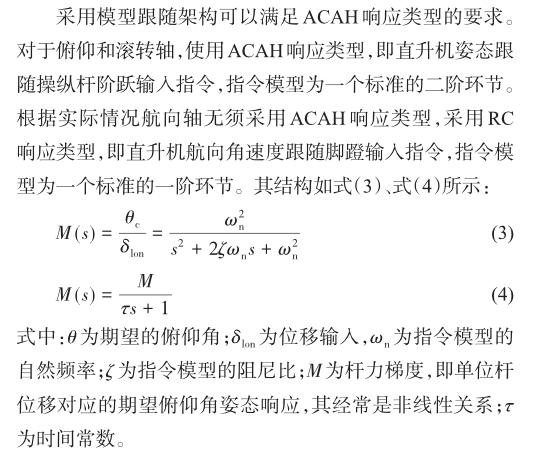
为了满足ADS-33E带宽准则,需要合理选择二阶环节的阻尼比与自然频率。通过飞行员在环仿真得到的参数,见表1。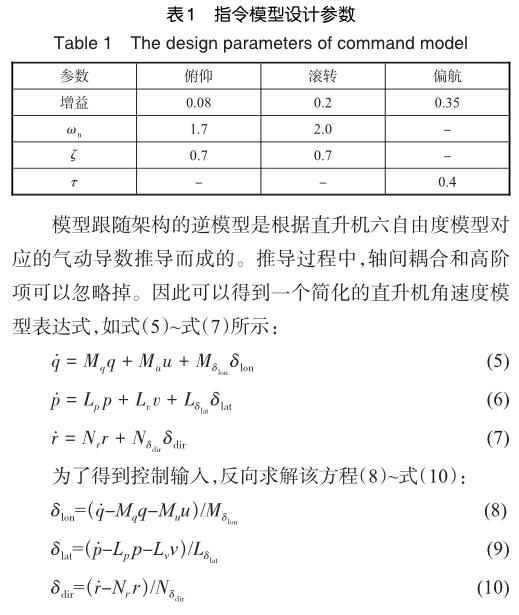
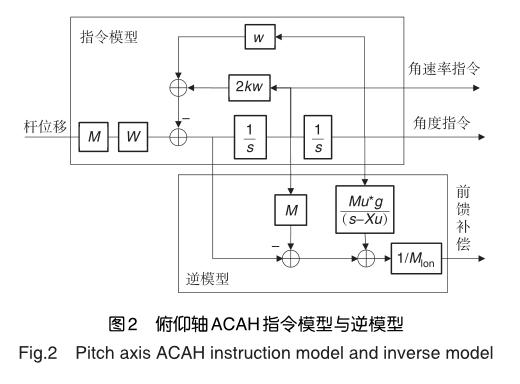
在具体实现中,为了避免使用微分模块,指令模型和逆模型在仿真中同时生成。通过将二阶环节拆分成可观测的形式,得到指令角速度和角加速度。根据这两个指令变量,计算出对应的逆模型输入指令。其中俯仰轴ACAH响应的指令模型与逆模型结果如图2所示。其中,指令俯仰角和俯仰角速度将与实际的反馈变量作差形成反馈控制指令。
2.2 TRC响应类型
对于TRC响应类型,其对应外环速度控制。实现方式为在ACAH响应类型控制结构上增加纵横向地速反馈,纵向TRC控制结构具体实现如图3所示。
按照以上搭建的控制律结构,纵横向均能够实现TRC/ ACAH/RCAH三种响应类型,满足了各级UCE条件下降低飞行员驾驶负担的要求,能够有效提高飞行品质。各轴的主要响应类型见表2。
小速度时采用TRC响应类型可以实现更加精准的控制,其余情况为保证机动性依旧采用ACAH响应类型,具体切换策略见表3,响应类型的切换通过设置转换开关实现:当速度超過20m/s,断开TRC支路,切换为ACAH响应类型。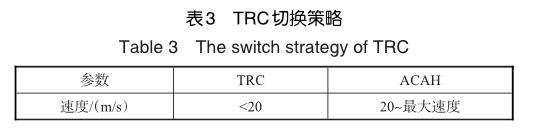
3驾驶员建模
在有人驾驶直升机中,飞行员接收来自外界的复杂环境信息和直升机仪器仪表显示的各种姿态信息,同时对直升机系统发出控制指令;而且飞行员的操作同时受到个人情绪等因素的影响,因此飞行员的操作可以看作复杂的控制系统。显然,建立飞行员的数学模型是十分困难的,但是对特定的飞行任务的控制行为进行数学化建模是可行的。飞行员操纵直升机时,存在反应延时、操纵误差和操纵延时等,本文中应用控制理论中的一阶、二阶线性环节和延迟环节的组合来表达飞行员对直升机的操纵。再考虑到个人喜好等非线性、时变因素和采样特征,在线性传递函数上加入随机噪声,建立拟线性控制模型(QLCM)来描述飞行员控
制模型[5]。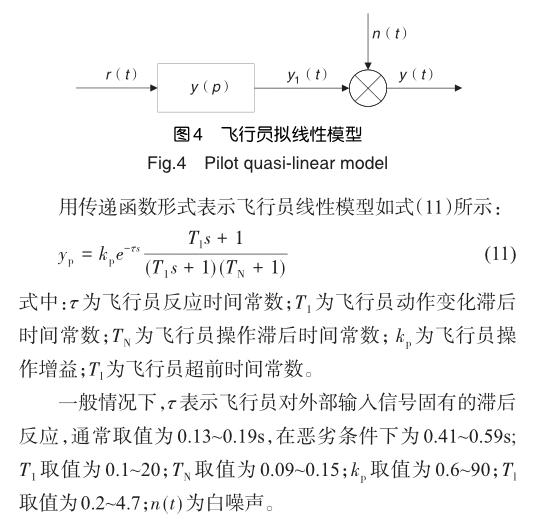
4舰面环境建模
4.1舰船运动模型
直升机着舰过程中,由于海浪的运动引起舰船六自由度运动,使着舰中心点成为一个在三维空间实时变化的点[5-7]。
本文中使用正弦波叠加的方式模拟甲板运动,舰船甲板运动模型参考5级海况下诺克斯级护卫舰甲板运动。舰船主要参数见表4。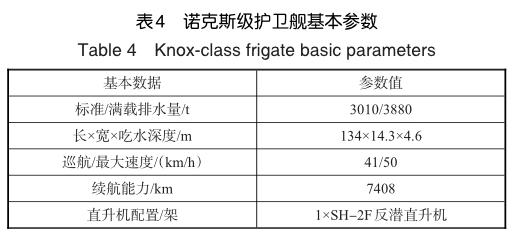
艦船甲板运动曲线如图5所示,其中?为舰船滚转角,θ为舰船俯仰角,Ys为着舰点侧向位置变化,Hs为着舰点高度变化。
由仿真曲线可以看出,5级海况下,着舰点侧向位移最大0.75m,高度变化最大超过1.6m。
4.2舰艉流模型
直升机着舰的区域一般位于舰船尾部,由于其前部受舰船的上层建筑物的遮挡,而后部空间开阔,造成了着舰区域空气流场复杂多变,产生剧烈的湍流[8-11]。着舰过程中,直升机速度较低,气流扰动对直升机的影响十分明显。
实际飞行过程中,直升机受到气流扰动主要作用在旋翼上,体现为纵向周期变距、横向周期变距、总距和尾桨距的变化。舰艉流模型以传递函数的形式给出,是直升机旋翼半径、气流扰动强度和风的平均速度的函数。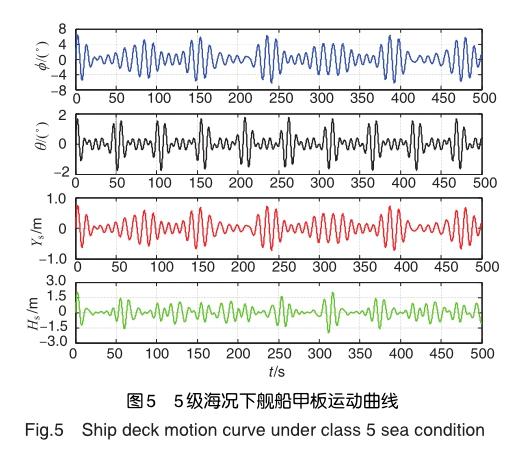
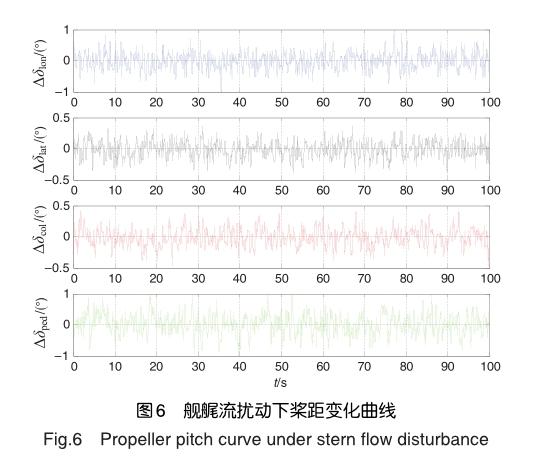

设定噪声强度为10,风速均值为15m/s,本文所研究的无人直升机发动机额定状态下旋翼转速为450r/m,气流扰动产生的桨距变化如图6所示。
5着舰任务仿真
着舰任务仿真中必须考虑直升机响应时延以便提高仿真结果准确性。根据工程经验,通过给模型中的直升机状态输出增加50ms延迟来体现。
5.1面向着舰任务的典型MTE的选择
着舰的完整流程可分解为下滑进近、悬停保持与垂直着舰三个阶段。典型的着舰下滑轨迹的建立如图7所示。参考文献[1]对直升机着舰MTE选择如下。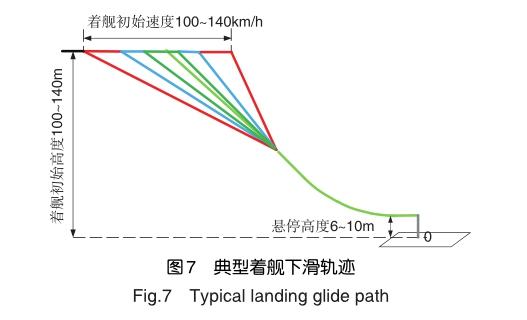
减速进场:直升机初始高度为140m,初始地速为120km/h,以4°的下滑角。逐渐将速度减为地速40km/h,直升机高度降为40m。
精确悬停:该科目用于模拟直升机进入甲板并精确保持的过程。直升机进场方式大致可分为45°、0°和90°进场方式,如图8所示。本文采用45°进场方式。直升机约40m的高度,逐渐将高度降至6m,地速降至10~18km/h,机体方向与甲板纵轴方向平行,飞行方向与甲板纵向呈45°。人机闭环系统通过实时感知悬停位置的偏差实现精确悬停。
垂直机动:该科目用于考核直升机在高悬停点和低悬停点的垂向机动能力。针对着舰任务,需要捕捉着舰静息期,快速将直升机高度从6m调整至1.5m,最终完成着舰任务。
5.2人机闭环仿真模型的构建
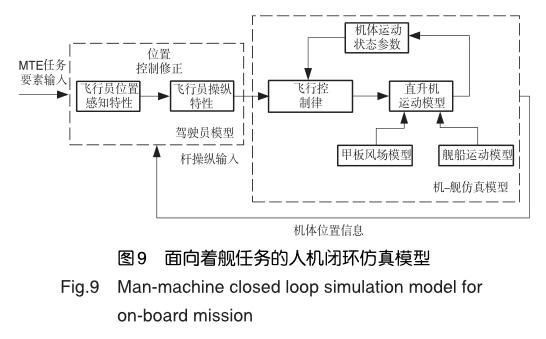
面向着舰任务的人机闭环仿真模型各个模块的示意图如图9所示。整个仿真模型的输入为着舰MTE要素。通过构建虚拟的驾驶员模型并感知机体的位置信息,实现人机闭环仿真模拟功能:飞行员模型通过综合机体的位置信息,并综合MTE要素,计算着舰位置控制的修正量;进一步通过考虑飞行员操纵特性,计算杆操纵输入量;机-舰仿真模型将杆操纵输入作为输入,可对机体的实际位置和姿态进行计算,最终完成着舰任务仿真。
5.3仿真结果
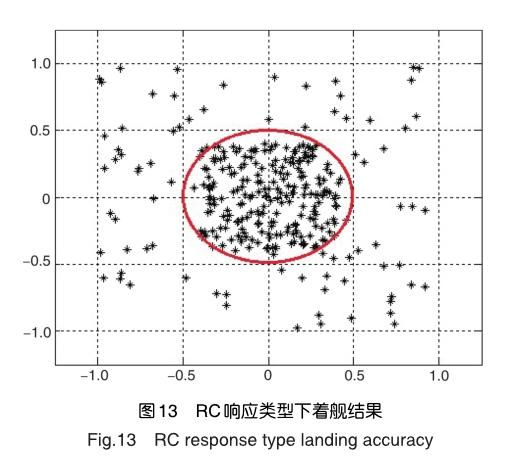
模拟5级海况条件,分别选用TRC/ACAH/RC三种响应类型,进行人在回路仿真,图10为着舰判定示意图,着舰仿真结果如图11~图13所示。
根据仿真结果可以看出,在采用TRC响应类型时,直升机基本都能满足落点精度要求,在采用ACAH响应类型时,会有个别点落在精度要求范围之外,在采用RC响应类型时,有较多点落在精度要求范围外。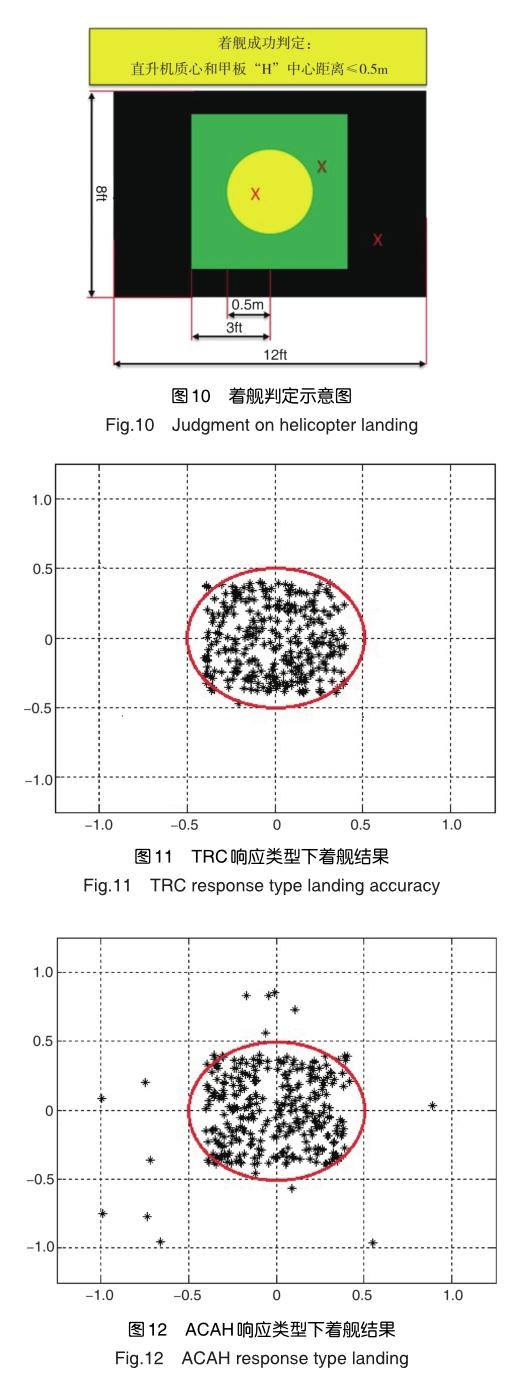
6结论
本文通过建立、分析直升机力学模型、驾驶员模型以及舰船运动模型,设计了直升机飞行控制律,并基于着舰任务需求,构建面向着舰任务的人机闭环系统,进行人在回路试验仿真,对比了不同响应类型下着舰控制效果。结果表明,相较于RC、ACAH响应类型,采用TRC响应类型,可以大幅提高5级海况下的着舰成功率,对后续型号设计应用有较大的指导意义。
参考文献
[1]谢强,党维.舰载直升机着舰飞行特性评估方法研究[J].工程与试验,2019,59(1): 38-41. Xie Qiang, Dang Wei. Study on assessment method for flight characteristics of shipboard helicopter[J]. Engineering and Test, 2019,59(1): 38-41. (in Chinese)
[2]井雅洁,梁昊.基于响应类型的直升机悬停状态显模型跟踪控制律设计[J].航空科学技术, 2018, 29(4):32-36. Jing Yajie, Liang Hao. Design of helicopter hover state tracking control law based on response type [J]. Aeronautical Science & Technology, 2018, 29(4):32-36.(in Chinese)
[3]杨文凤,张宏林,宋攀.直升机横向TRC响应类型及飞行品质仿真分析[J].航空科学技术, 2018, 29(3):15-19. Yang Wenfeng, Zhang Honglin, Song Pan. Simulation and analysis of lateral TRC response type and handling quality on a helicopter[J]. Aeronautical Science & Technology, 2018, 29(3): 15-19.(in Chinese)
[4]杨一栋.直升机飞行控制[M].北京:国防工业出版社,2011. Yang Yidong. Helicopter flight control[M]. Beijing: National Defense Industry Press,2011. (in Chinese)
[5]Ronald A H. A simplified technique for modeling piloted rotorcraft operations near ships[C]//AIAA Atmospheric Flight Mechanics Conference and Exhibit,2005.
[6]张永花.舰载机着舰过程中甲板运动建模及补偿技术研究[D].南京:南京航空航天大学,2012. Zhang Yonghua. Research on deck motion modeling and deck motion compensation for carrier canding[D].Nanjing: Nanjing University ofAeronautics andAstronautics,2012. (in Chinese)
[7]Lusardi J A. Control equivalent turbulence inputs model for the UH-60[D].University of California,2004.
[8]杨一栋.无人直升机着舰制导与控制[M].北京:国防工业出版社,2013. Yang Yidong. Unmanned helicopter landing guidance and control[M].Beijing: National Defense Industry Press,2013. (in Chinese)
[9]韩晓宁,赵欣凯.用飞行员模型进行飞行品质自动评估技术研究[J].飞行力学,2013, 31(4):293-296. Han Xiaoning,Zhao Xinkai. Study on automatic flight quality evaluation with the pilot model[J]. Flight Mechanics, 2013, 31(4):293-296. (in Chinese)
[10]阳再清,薛艳峰,刘关心.舰载无人直升机系统设计中几个问题的思考[J].直升机技术, 2013(4):47-50. Yang Zaiqing,Xue Yanfeng,Liu Guanxin. Thinking of several problems in the design of shipborne unmanned helicopter system[J]. Helicopter Technology, 2013(4):47-50. (in Chinese)
[11]阳再清,魏晓恒.环境特性对无人直升机着舰控制的影响[J].宇航计测技术,2013,33(4):33-38. Yang Zaiqing,Wei Xiaoheng. The effect of environment factors on unmanned helicopter landing warship control[J]. Aerospace Measurement Technology, 2013,33(4):33-38. (in Chinese)
(責任编辑陈东晓)
作者简介
贾新强(1972-)男,高级工程师。主要研究方向:飞行控制。
Tel:029-61889006
E-mail:spad@163.com
张松(1994-)男,助理工程师。主要研究方向:直升机飞行控制。
Tel:029-61888329
E-mail:597337236@qq.com
黄飞飞(1995-)男,硕士研究生。主要研究方向:直升机飞行控制。
Tel:029-61888370
E-mail:1175641481@qq.com
Design and Simulation of Helicopter Landing Control Law Based on Man in Loop
Jia Xinqiang1,*,Zhang Song2,Huang Feifei2
