基于磁链与负载观测器的异步电机反步滑模控制
2021-04-08 03:35
电气传动 2021年7期
(青岛大学自动化学院,山东青岛266071)
异步电机(induction motor,IM)由于价格低廉、可靠耐用、维护要求低以及调速范围广的优点,被广泛用于工业制造中[1]。然而,异步电机是一个非线性、多变量和强耦合的系统,要想充分发挥其机械性能,需要选择合适的控制方法[2]。矢量控制使异步电机的磁通与转矩解耦,进而响应速度加快,调速性能也大幅提升[3-4]。实际工业生产中,电机的持续运行会导致绕组升温,这会使绕组参数发生摄动,其中转子电阻值会在很大程度上发生改变[5-6],而且电机负载转矩通常是未知或不精确的,因此使矢量控制动态响应大打折扣,降低了系统运行的可靠性[7]。目前,有许多控制算法可以使异步电机系统具有良好的动、静态性能。文献[7]提出了一种暂态矢量估计器,将标量控制(v/f)的鲁棒性与矢量控制的动态性能融合在一起。文献[6]中使用已知回归模型来同时估计电机速度与定、转子电阻,增加了联合估计的稳定性。文献[8]设计了基于Gopinath模型的电压模型磁链观测器,其对转子电阻与互感变化具有鲁棒性。文献[9]利用模型参考自适应(model reference adaptive system,MARS)算法,在线辨识转子时间常数,降低了转子电阻摄动对转速的影响。文献[10]设计的模型预测控制结构简单,降低了参数调节的难度,但不能完全消除系统中的不确定因素和外部扰动。文献[11-12]设计了一种在零频或低频下的速度控制方法,提出一种新型自适应滑模观测器(sliding mode observer,SMO),对定转子电阻进行估计,增加了系统对参数不确定的鲁棒性和估计精度。哈密顿控制在电机参数变化时能够稳定跟随期望转速,但是系统的响应速度较慢[13]。模糊控制倚赖学者的经验,其应用范围也因此受到限制[14]。模型参考自适应与神经网络控制运算量大,对处理器性能要求较高,也没有被广泛应用于生产中[15-16]。滑模变结构控制鲁棒性好,但会使系统产生抖振,抖振过大会影响系统性能[17]。自适应反步控制可以减弱负载干扰的影响,但跟踪精度依赖于磁通的观测精度[18]。转子电阻摄动时,传统的开环磁链观测器不能准确估计出电机磁通值,常规滑模磁链观测器观测值抖振较大[19-20]。
本文设计了转子磁链观测器、负载转矩观测器与反步滑模控制算法,将转子磁通观测值用于负载转矩的估计,并将磁链与负载的观测值送入反步滑模控制器。实验结果表明,在转子电阻摄动与负载未知且变化时,该策略具有更好的运行性能。最后,针对电机启动或转速突变时定子电流与电磁转矩急剧增加的问题,提出了一种转速软给定策略,实验结果验证了该软给定方法的有效性。
1 异步电机数学模型
在d-q同步旋转坐标系下,按转子磁链定向λrd=λr,λrq=0,异步电机的数学模型为[19]
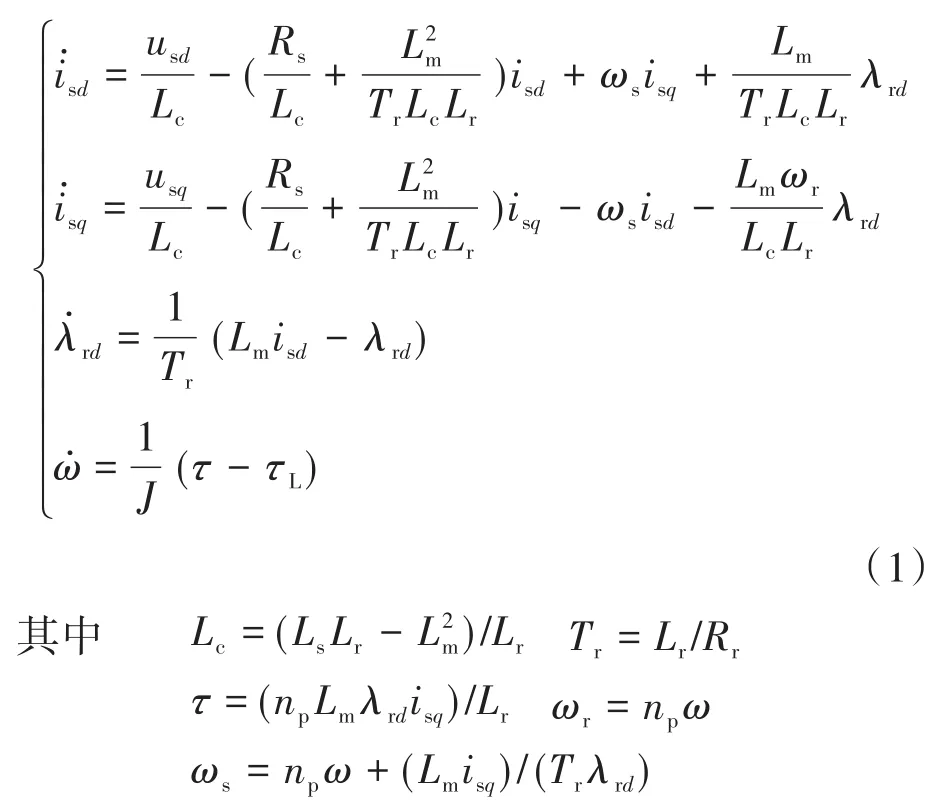
式中:Tr为转子时间常数;isd,isq分别为d,q轴的定子电流;usd,usq分别为d,q轴的定子电压;λrd,λrq分别为d,q轴的转子磁链;Rs,Rr分别为定子和转子电阻;Ls,Lr,Lm分别为定子电感、转子电感和定转子之间的互感;ω为转子机械角速度;ωs,ωr分别为定子电角速度和转子电角速度;J为转动惯量;np为极对数;τ,τL分别为电磁转矩和负载转矩。
2 异步电机控制系统框图
图1为异步电机反步滑模控制系统框图。观测器通过定子电流与转速的测量值,估计出磁通与负载,最后将测量值与观测值一起送入反步滑模控制器。
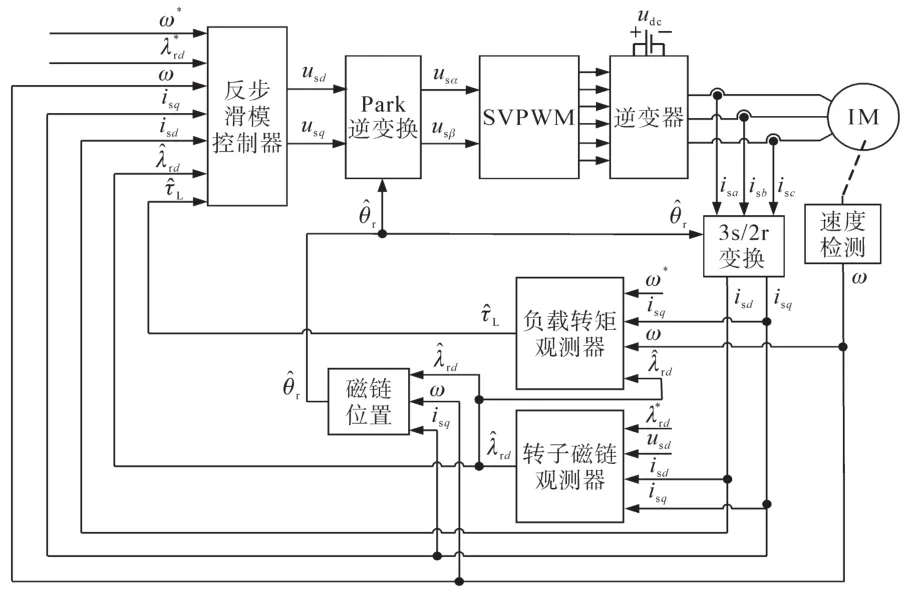
图1 异步电机反步滑模控制系统框图Fig.1 Structure diagram of backstepping sliding mode control of induction motor
3 转子磁链观测器设计
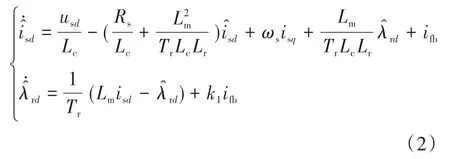
由于转子磁链λrd无法直接测得,根据式(1)所示的异步电机的数学模型,设计闭环指数趋近律的滑模转子磁链观测器。
观测器设计如下:
其中
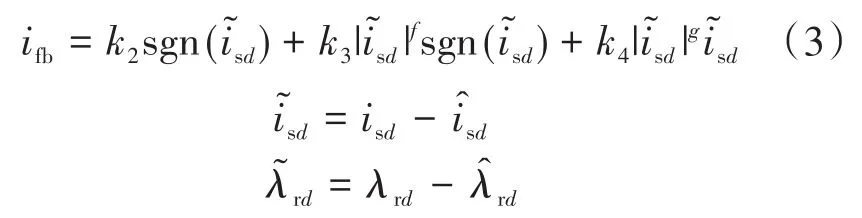
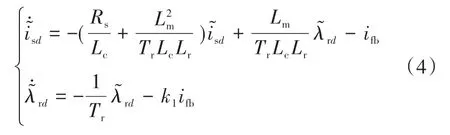
通过式(1)和式(2),可得定子电流与转子磁通的观测误差方程为
定义定子电流与转子磁通观测误差的滑模面为

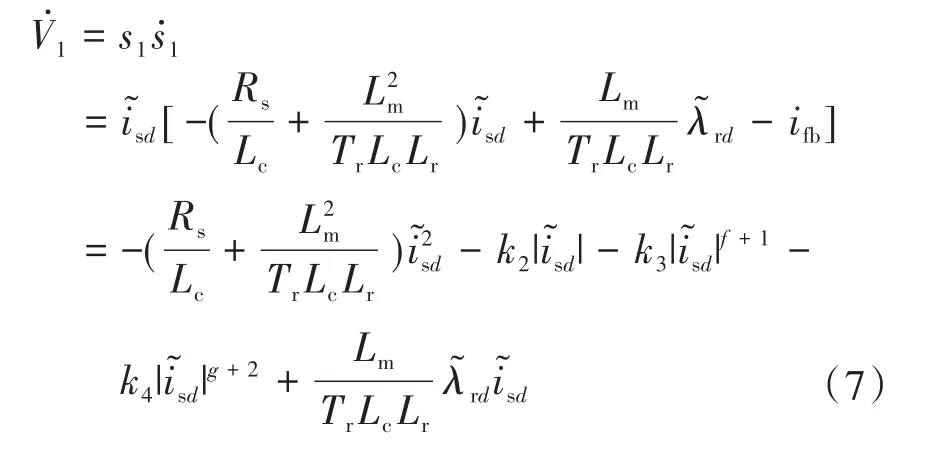
定义Lyapunov函数为

根据式(3)~式(5),可得V1的一阶导数为

定义Lyapunov函数为

根据式(3)~式(5),可得V2的一阶导数为
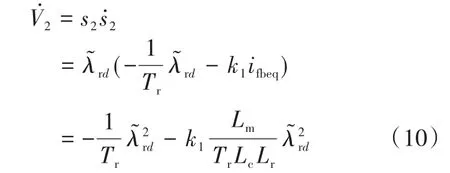
由于设计参数满足k1> 0,故可得。当且仅当,即s2=0 时,。根据 Lyapunov稳定性定理可知,d轴磁通是渐近收敛的。在控制律ifbeq的控制下,磁通观测值可以在有限时间内收敛至真实值λrd。

4 反步滑模控制器与负载转矩观测器的设计
4.1 反步控制器与负载转矩观测器设计
定义转速误差、磁链跟踪误差为
式中:ω*为给定的转子机械角速度为给定的转子d轴磁通。
根据式(1),可得式(12)的一阶导数为
为了更好地抑制负载转矩扰动的影响,本文在反步控制器的设计步骤中,设计了负载转矩观测器,实现了对未知负载转矩的精确估计。定义Lyapunov函数为

式中:k5为设计参数,k5> 0;eL,分别为负载转矩的误差值和估计值。
根据式(13)、式(14),可得V3一阶导数为

4.2 滑模控制器设计
5 系统稳定性分析
为了证明所设计控制器的稳定性,定义整个系统的Lyapunov函数为

对式(33)求一阶导数,可得:

将式(7)、式(10)、式(19)和式(31)代入式(34),可得:

当且仅当s1=s2=s3=s4=eL=eλ=eω=0时。根据Lyapunov稳定性判据和Lasalle不变集可知,所设计的控制系统是全局渐近稳定的。
6 转速软给定
在电机启动或转速设定变化时刻,会产生较大的冲击电流,进而导致电磁转矩急剧升高,严重影响了电机系统的运行安全。因此,本文设计了一种转速软给定的方法,软给定转速为

7 实验验证与结论
为了验证所设计控制策略的实用性,在基于LINKS-RT的感应电机变频调速实验平台上进行实验验证。LINKS-RT是北京灵思创奇公司开发的与Matlab/Simulink连接的变频调速系统。实验平台如图2所示,该平台由异步电机、负载电机、制动电阻、研发型伺服驱动器与仿真机组成。在给定转速变化、负载未知且变化和转子电阻摄动的情况下,将该控制策略与自适应反步控制方法进行实验结果的对比。磁链观测器参数为:k1=0.00001,k2=k3=k4=50,f=g=0.5;负载观测器参数为:k5=1100,k8=3 500;控制器参数为:k6=k7=50,k9=k10=1,k11=k12=k13=k14=1500,m=n=0.5;实验时间为20 s。实验采用的异步电机参数为:PN=1.5 kW,UN=220 V,IN=5.9 A,nN=1 500 r/min,Rs=0.96 Ω,Rr=0.93 Ω,Ls=118.32 mH,Lr=118.67 mH,Lm=112.23 mH,τL=9.6 N·m,np=2,J=0.0038 kg·m2。
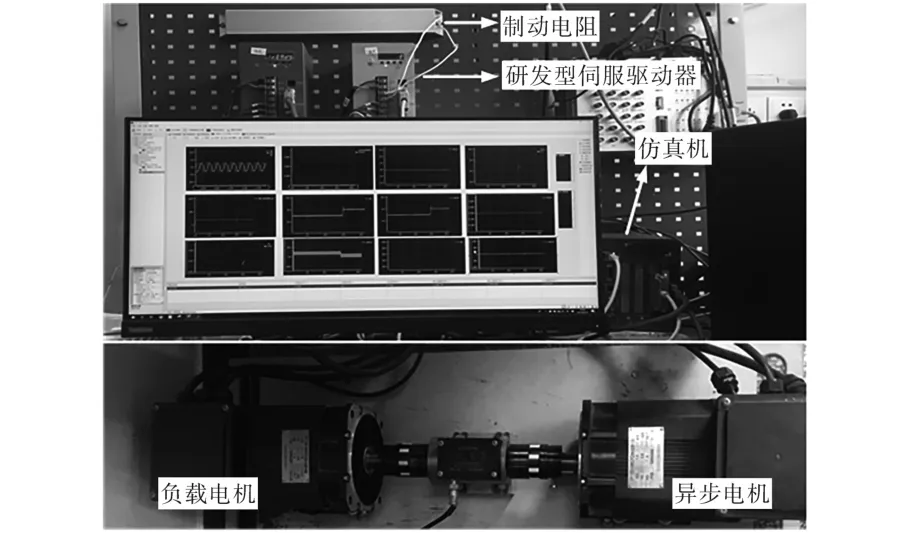
图2 异步电机系统实验平台Fig.2 Experiment platform of induction motor system
为验证该控制策略对设定转速变化与负载未知且变化的鲁棒性,在t=0 s时,给定转速ω*=200 r/min,转子磁通,负载τL=1 N·m。5 s时,ω*增加至600 r/min,10 s时,ω*增加至1 000 r/min,15 s时,负载增加至2 N·m。响应曲线如图3所示。由图3可见,该策略在给定转速ω*变化时,有更快的响应速度;稳态时该策略的跟踪精度更高;负载转矩未知且变化时,该控制策略能准确快速地估计出实际负载转矩,且在负载转矩变化时刻,电机转速波动更小;改进型滑模磁链观测器能准确地观测到电机转子磁链,且较常规滑模观测器的抖振更小。
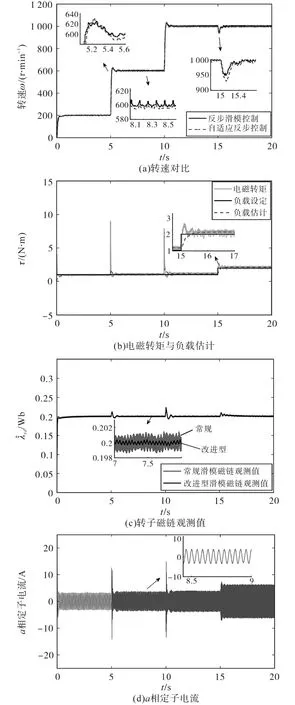
图3 转速与负载转矩变化时的实验曲线Fig.3 Experimental curves when the speed and load torque change
实验中异步电机转子电阻无法突变,可更改控制器中转子电阻的参数Rr来模拟电机转子电阻突变。为验证该控制策略对转子电阻摄动的鲁棒性,在图3的实验条件下,t=8 s时将控制器中的参数Rr变为标称值的0.5倍,即Rr=0.465 Ω。实验响应曲线如图4所示。由图4可见,转子电阻突变后,该策略转速波动小且能迅速跟踪至给定转速;所设计的磁链观测器仍能准确观测到转子磁链,且较常规滑模观测器的抖振小。
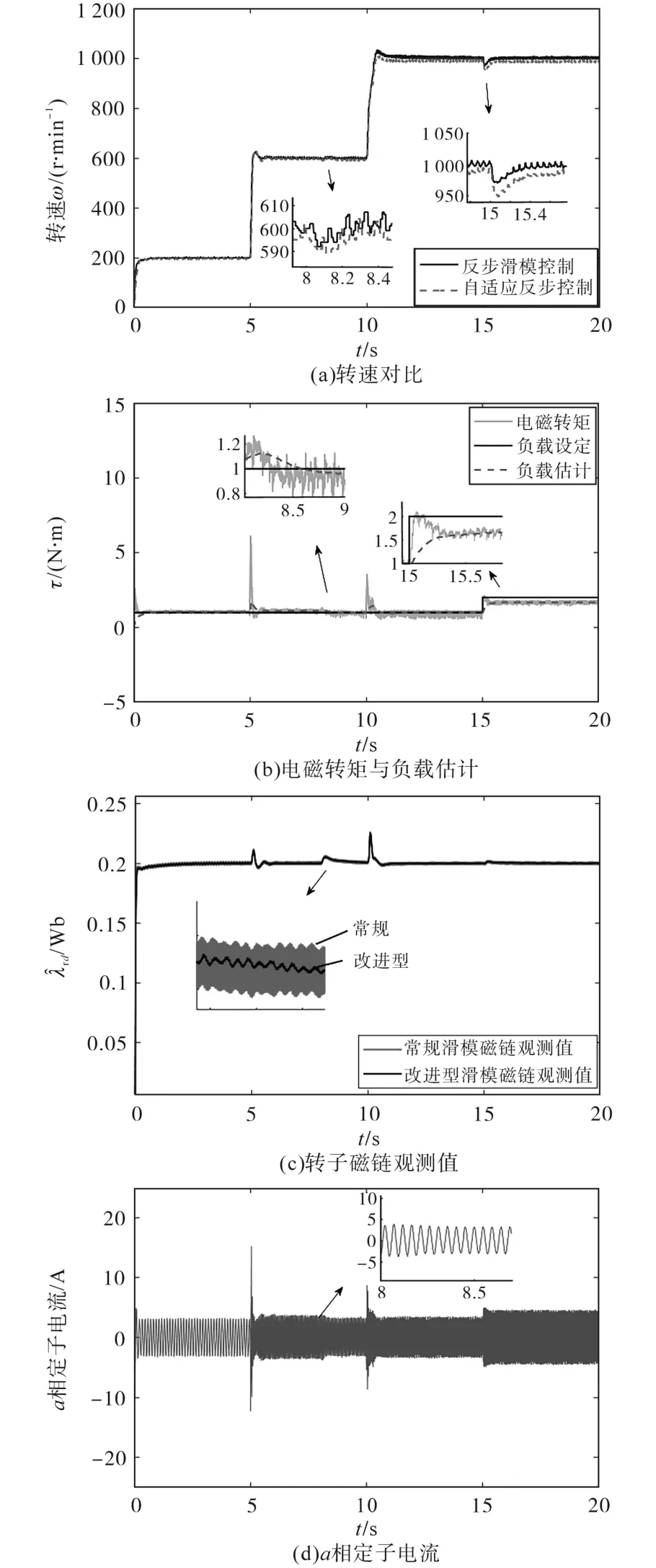
图4 转子电阻摄动时的实验曲线Fig.4 Experimental curves when the rotor resistance perturbation
在图3的实验中,电机启动或给定转速变化时刻,定子电流与电磁转矩急剧增加,这会影响电机系统的寿命与运行安全。采用本文设计的转速软给定的方法,将给定转速ω*通过式(36)转换为软给定转速,其中设计参数T0=0.2。再次运行图3条件下的电机系统,响应曲线如图5所示,软给定前后数据对比如表1所示。由图3、图5与表1可见,在转速软给定条件下,该控制策略在转速变化的时刻(0 s,5 s,10 s),定子电流与电磁转矩的峰值明显减小,验证了转速软给定算法的实用性,增强了电机系统的使用安全。
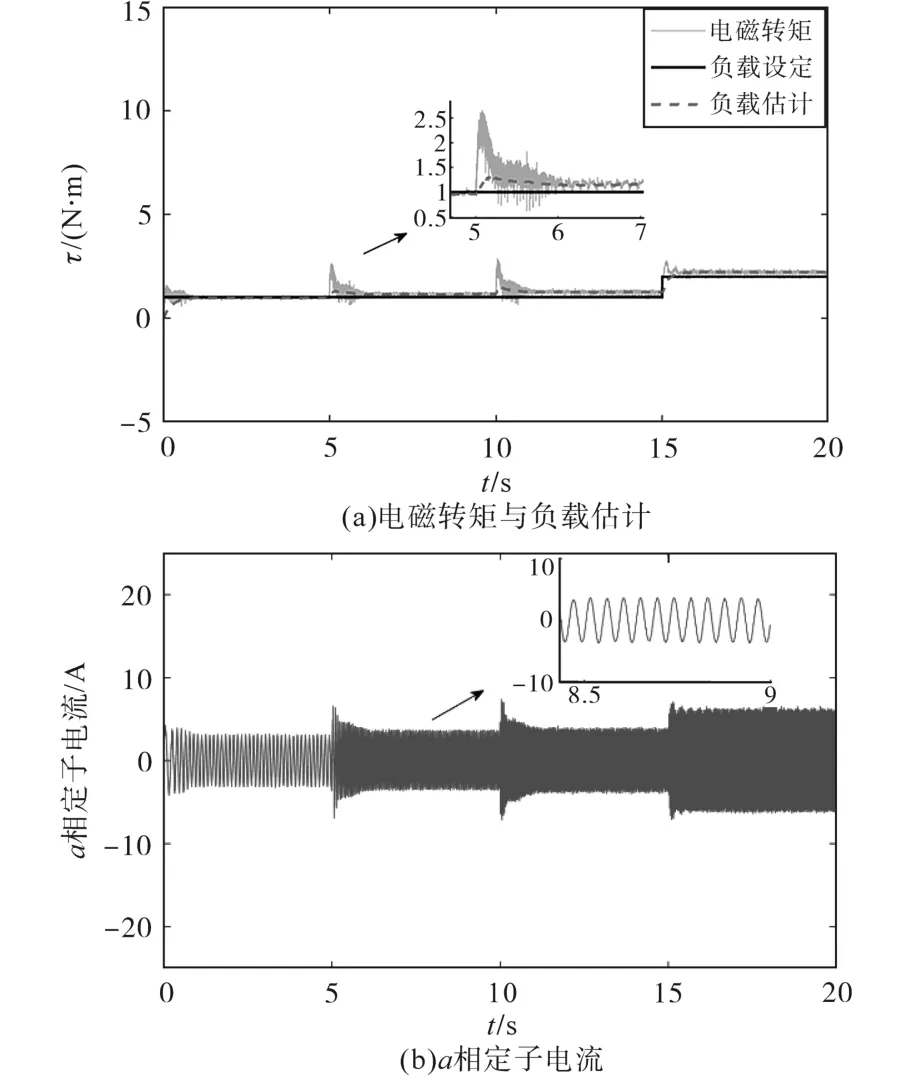
图5 转速软给定下的实验曲线Fig.5 Experimental curves when the soft speed setting
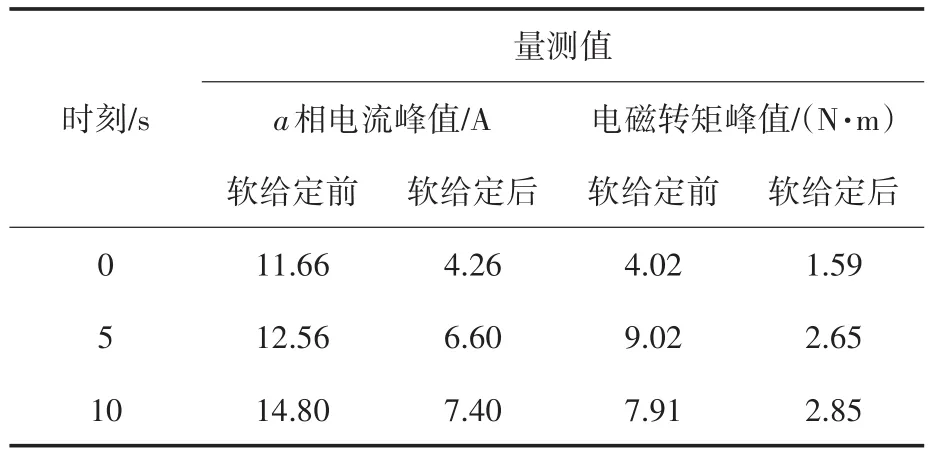
表1 转速软给定下的数据对比Tab.1 Data comparison of the soft speed setting
本文设计了改进型磁链观测器、负载转矩观测器与反步滑模控制策略,提出了一种转速软给定算法。利用电流和转速的测量值,精确估计出转子磁通值,同时将磁通观测值用于负载转矩估计。实验结果表明,所设计的观测器可以准确观测出磁通与负载转矩,设计的控制策略响应速度快且稳态精度高,有效抑制了转子电阻摄动与负载扰动对系统性能的影响,使异步电机速度控制具有良好的鲁棒性、动态响应速度与跟踪精度。最后,实验结果验证了转速软给定方法的有效性。
猜你喜欢
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
传感器与微系统(2018年7期)2018-08-29
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年3期)2015-04-09
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04