立体式风光互补发电系统结构与太阳跟踪控制的设计
2021-04-07 07:41俞先锋陈广寿李思筱
浙江水利水电学院学报 2021年1期
俞先锋,陈广寿,李思筱,杨 悦
(浙江水利水电学院 电气工程学院,浙江 杭州 310018)
0 引 言
在传统能源逐渐消耗殆尽并产生环境污染的背景下,新能源以其清洁、环保、储量巨大、可再生等特点,逐渐走上能源结构转型的舞台,多种新能源发电系统应运而生。其中一种混合式发电系统得到了国内外的关注和研究,即风光互补发电系统,其将风电与太阳能发电组合成一个新能源混合发电系统[1]。这样的互补发电系统可有效应对风光系统的输出功率和波动问题,使其对电网电压和频率的影响较小,可提高风光发电系统的调度灵活性[2],同时其可以弥补,风能和太阳能在最佳利用时间上存在差异的不足,提高能源的利用率。从目前的光伏发电站基本特点来看,光伏板平铺且固定安装造成太阳能利用率不高,且需要占用较多的土地资源[3-4]。为了解决上述问题,本文设计了一种立体式风光互补发电结构,并耦合太阳跟踪控制,在减少占地面积的同时,还可以进一步提高太阳能的利用率。这里的太阳跟踪主要采用双轴跟踪控制方式[5],为了配合双轴跟踪控制,在立体式发电结构上采用了特殊的结构设计。在整个立体式发电结构的顶部安装垂直轴风力发电机,充分利用高空较大的风能发电。
1 互补发电系统结构设计
互补发电系统整体的结构主要由底部支撑结构、中部三角支撑垂直分布结构、顶部风力发电机结构等组成(见图1)。底部支撑结构中的轴承设计是为了对整个发电结构起支撑作用,同时对实现太阳方位角跟踪起着关键作用;中部三角支撑垂直分布结构内设计多层三角平台,用于放置光伏板和顶部的风力发电机,多层垂直分布的光伏板通过带滑环的连杆连接在一起,主要是为了实现多层光伏板太阳高度角跟踪的统一性;顶部三角平台上安装垂直轴风力发电机。

图1 立体式结构设计示意图
1.1 底部支撑结构设计
如图2所示,底部支撑结构最重要的部分是带齿圈的轴承,该轴承借鉴了与风力发电机的偏航系统的设计[6]。轴承外圈可以通过几个立柱固定安装在地面基础上,内圈与中部三角支撑框架固定安装。由于该轴承内圈带齿,它可以与固定安装在地面的步进电机的轴端齿轮啮合,实现太阳方位角跟踪。当进行太阳方位角跟踪时,步进电机带动轴承的内圈旋转,中部三角支撑框架也随之转动,使垂直分布的所有光伏板随太阳方位角的变化而变化。

图2 底部支撑结构设计示意图
在底部支撑结构中还有一个始末点跟踪控制结构,所使用到的器件包括增量式编码器、限位开关及机械触点。在结构设计中,将增量式编码器固定在支撑结构的底座,通过齿轮与轴承的内齿圈啮合。机械触点代表光伏板的位置,安装在轴承内圈的底部,位于光伏板的正下方,同时安装两个限位开关。考虑到该立体式风光互补结构适用于高纬度地区,即正午高度角小于90°,因此,以光伏板的正东方向为0°,顺时针方向角度为正,两个限位开关分别安装在10°和170°的位置,对应光伏板一天中方位角调整的起点和终点。
1.2 中部三角支撑垂直分布结构设计
固定安装在底部轴承内圈上的三角支撑框架上设计多层平台,每一平台上均可以并排安装光伏板,同一平台上的所有光伏板固定连接(见图3),光伏板通过支撑结构安装在水平方向的旋转轴上,旋转轴通过滑动轴承支撑在平台上。水平旋转轴上固定安装大齿轮,它可以与固定安装在平台上的步进电机的轴端齿轮啮合,实现太阳高度角跟踪。当进行太阳高度角调整时,步进电机带动轴端齿轮旋转,与水平旋转轴上的齿轮啮合,从而带动同一平台上的所有光伏板统一随太阳高度角的变化而变化。
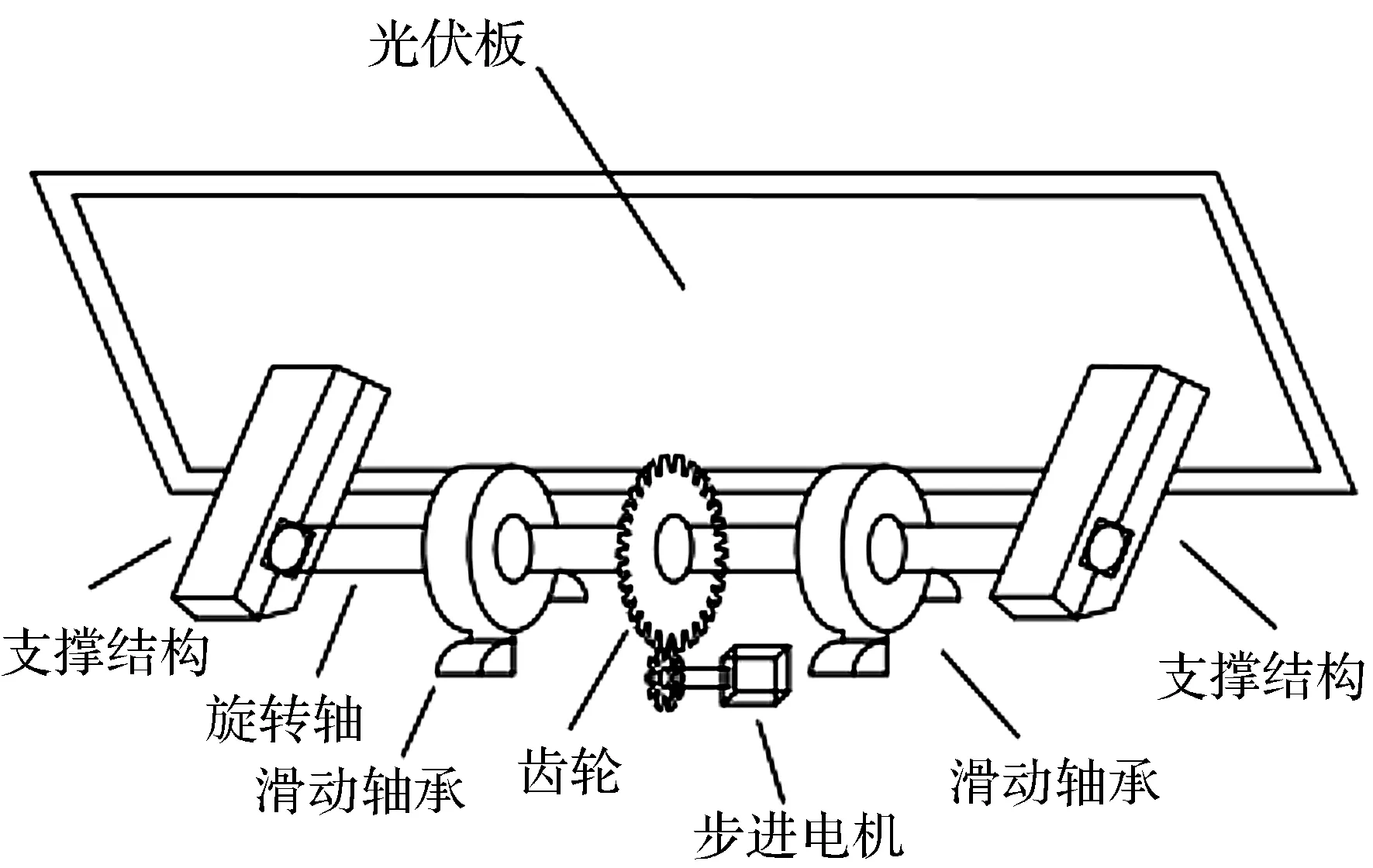
图3 太阳高度角跟踪控制结构设计示意图
要实现垂直分布的光伏板进行整体式太阳高度角跟踪,首先在每一层最中间一块光伏板的后侧安装一个直角扣件,下层光伏板的直角扣件朝上安装,上层光伏板的直角扣件朝下安装,然后使用带滑环的连杆进行连接。
1.3 顶部风力发电机结构设计
中部三角支撑框架的顶部平台上安装垂直轴风力发电机,垂直轴风力发电机无需对风、噪音小、易于安装和便于维修[7-8],同时安装于顶部,可以减小风的推力载荷作用,有利于保持整个发电结构的稳定性。在进行结构设计时,考虑到风机的转动需要轴承,所以需要在底部安装轴承,轴承的外圈固定在三角平台上,内圈连接垂直轴风机的叶片。
2 太阳跟踪控制的设计
太阳跟踪控制系统的结构设计前文已经介绍,以下着重介绍跟踪控制系统的电路以及控制流程的设计。
2.1 跟踪系统的电路设计
太阳跟踪控制系统的电路的组成包括光电检测电路、信号处理、A/D转换、单片机主控电路、步进电机驱动电路、始末跟踪电路、时钟和人机交互电路等(见图4)。光电检测电路对5个光电池的信号进行采集,南北方向和东西方向各为一组,用于检测东、南、西、北四个方位的光照强度,第五个光电池用于检测当天的天气状况;信号处理电路主要是对东西和南北两个方位的光电池信号分别进行比较和放大,得到太阳方位角和高度角调整的依据;A/D转换电路采用12位精度的TLC2543模数转换芯片对上述两路放大的信号进行模数转换,之后送入单片机进行处理;单片机主控电路主要是完成光电池检测信号的数据处理和判断、时钟和人机交互信号处理、太阳方位角和高度角电机驱动信号的输出、始末跟踪控制信号的处理以及增量式编码器信号处理等;步进电机驱动电路采用ULN2003驱动芯片构成的电路,采用12V电源;始末跟踪电路对两个行程开关的开关信号进行采集,送入单片机处理;时钟和人机交互电路包括DS1302时钟的接口电路、设置按键接口以及显示接口电路等。
2.2 跟踪系统控制流程的设计
目前的太阳跟踪方式主要有光电传感跟踪和视日运动轨迹跟踪两种方式[9],根据不同时钟下太阳的位置实现光伏板的自动定位控制(包括高度角和方位角),即实现视日运动轨迹跟踪;利用光电池光照强度检测传感器采集的信号实现太阳能板高度角以及方位角的校正控制,实现双轴自动跟踪,即实现光电传感跟踪[10]。

图4 太阳跟踪控制系统的电路组成
该跟踪系统是将上述两种方式相结合,主要控制流程(见图5)。根据廖锦城[11]的研究,可以每隔10 s采集一次光照信息,并将其通过AD转换送入单片机进行处理。根据光伏板中间位置的光电池采集的光照强度来选择视日运动轨迹跟踪或光电传感跟踪。当光照强度小于3(由信号处理电路决定,代表阴雨天)时,启动视日运动轨迹跟踪,根据实时时钟数据计算太阳的方位角和高度角,结合编码器的角度,驱动两路步进电机旋转,使光伏板调整到相应的位置;当光照强度大于3时,启动光电传感跟踪,先对东、西两个方位的光电池信号误差进行处理,根据其正负来决定方位角步进电机旋转方向,实现太阳方位角跟踪,跟踪到位后再对南、北两个方位的光电池信号误差进行处理,根据其正负来决定高度角步进电机旋转方向,实现太阳高度角跟踪。
当结束一天的跟踪后,整个结构会继续旋转直至触碰到日落限位开关,然后跟踪结构向相反的日出方向旋转,当跟踪结构触碰到日出限位开关,这时单片机会发出一个日出角度的指令给步进电机,使跟踪结构转移至第二天的日出位置。

图5 跟踪系统控制流程图
3 互补发电系统模型制作
根据立体式风光互补发电系统的设计要求,先对结构方案进行论证,然后再依据结构设计方案对主体框架、底部支撑结构、中部三角支撑垂直分布结构、顶部风力发电机结构等进行模型设计与制作(见图6)。
在整个模型的制作过程中,在三角框架内设计三角平台,使整个结构的稳定性得到了保证,光伏板呈立体垂直分布,在底部的光伏板内设置了5个光电池,通过光电池检测光强的变化,使得光伏板可以时刻对太阳角度的变化进行跟踪,顶部的垂直轴风机可以接收任何风向的来风并使其旋转,通过测试最终达到了预期效果。
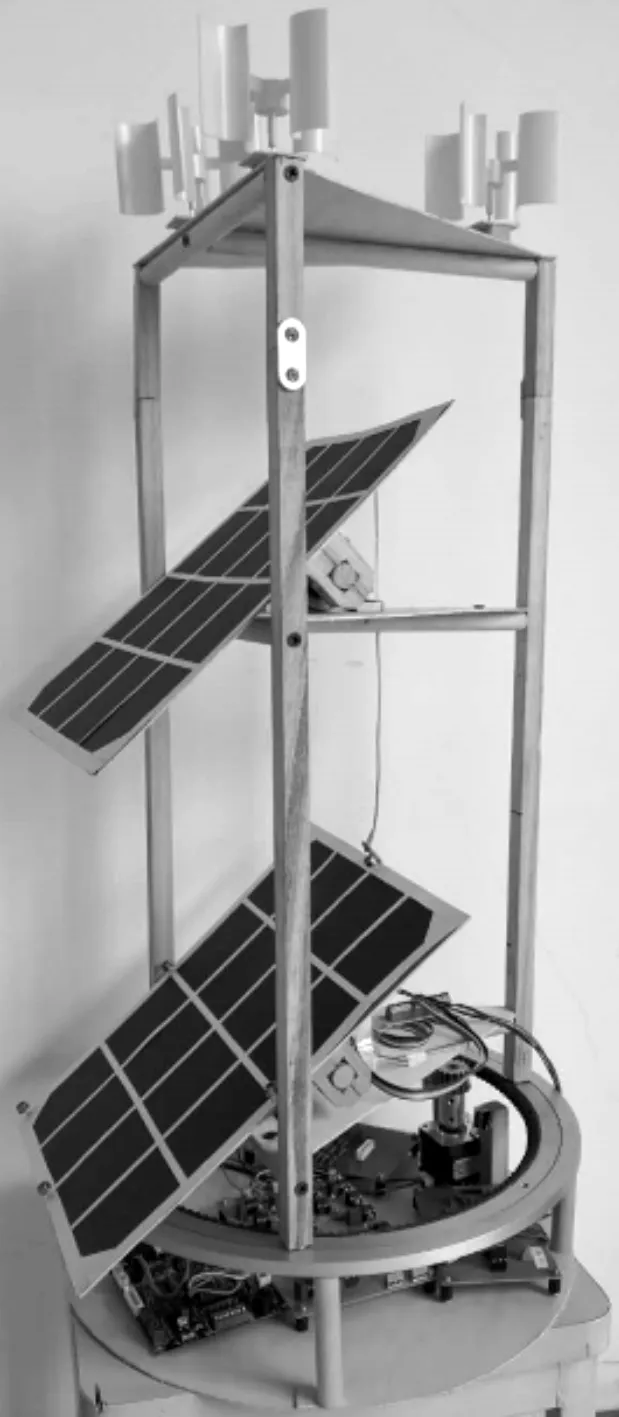
图6 互补发电系统模型制作
4 系统测试
对上述制作的简易模型进行了系统测试,主要针对视日运动轨迹跟踪和光电传感跟踪两种方式分别进行测试。测试时间为2020年11月20日和21日。
4.1 视日运动轨迹跟踪测试
2020年11月20日,首先将模型装置放置于室内,模拟太阳光照度不强的阴天天气情况,进行视日运动轨迹跟踪测试,高度角以水平位置为0°,方位角以正东方向为0°。以1 h为单位进行跟踪测试,分别取8:00—17:00区间内的整点时刻,根据学校位置(杭州,以北纬30.3°,东经120.2°,海拔19 m为计算依据)计算每一整点时刻的高度角和方位角,然后控制两路步进电机旋转,将编码器角度测量值与计算值进行比较结果(见表1)。从表1数据可知,视日运动轨迹跟踪的高度角和方位角跟踪误差较小,可以实现比较精确的跟踪。
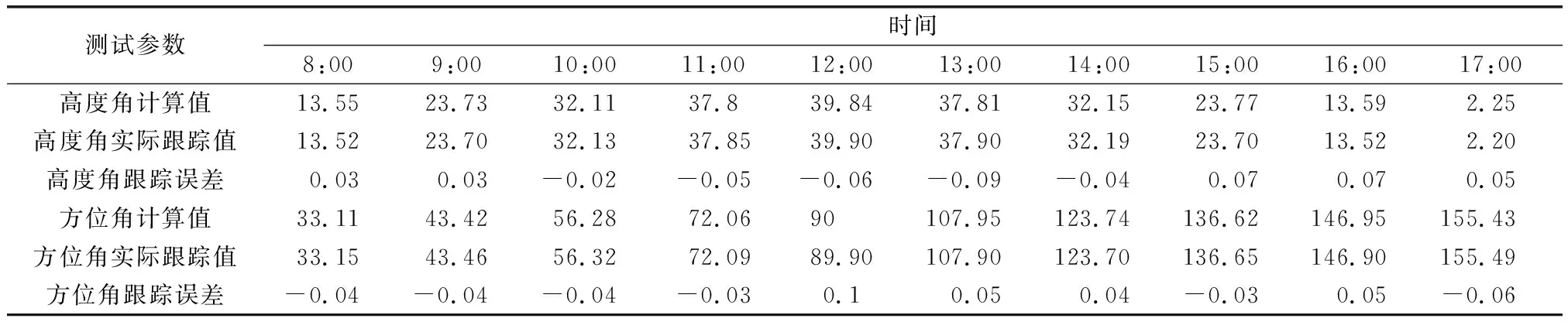
表1 视日运动轨迹跟踪测试数据
4.2 光电传感跟踪测试
2020年11月21日,天气多云,太阳光照度良好,将模型装置放置实验楼楼顶,进行光电传感跟踪测试,以1 h为单位进行跟踪测试,分别取8:00—17:00区间内的整点时刻,测量光电传感跟踪的高度角和方位角,然后根据学校位置(杭州,以北纬30.30°,东经120.20°,海拔36 m为计算依据)计算每一整点时刻的高度角和方位角,将测量值与计算值进行比较,数据如表2所示。从表2数据可知,光电传感跟踪的高度角和方位角跟踪误差比视日运动轨迹跟踪的大,这与光电传感器的结构、安装位置以及灵敏度有关,如果对光电传感器的结构以及安装位置进行优化,可以适当减小跟踪误差。
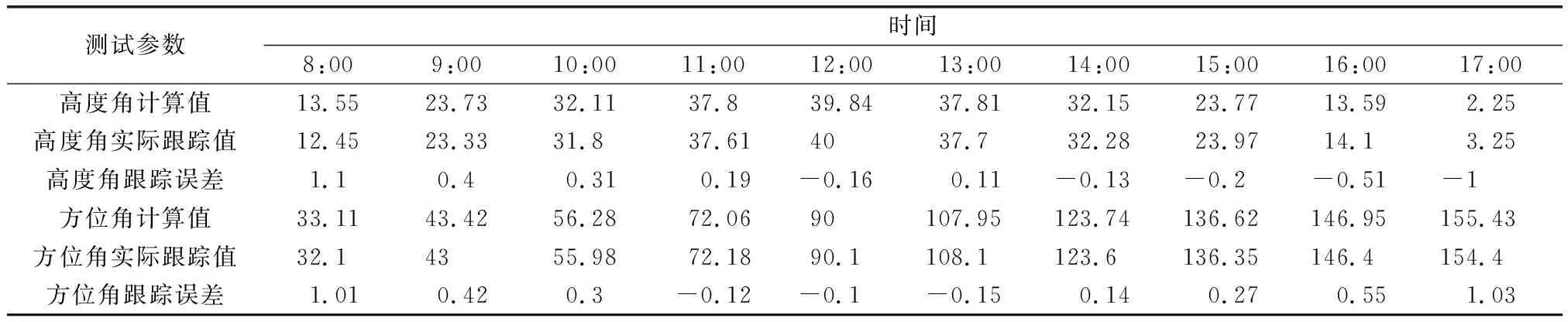
表2 光电传感跟踪测试数据
5 结 语
随着新能源产业不断发展壮大,风光互补这一种多能互补的发电方式必将受到越来越多的关注,本文设计的立体式风光互补发电系统,结合了风能和太阳能的互补特性,使输出的功率更稳定,光伏板采用垂直分布,并且设计双轴太阳跟踪系统,不仅节约了土地资源,还提高了能源的利用率。使用带滑环的连杆来连接垂直分布的所有光伏板进行高度角调整,节约了跟踪装置的成本。跟踪方式采用光电传感跟踪和视日运动轨迹跟踪两种方式相结合,具备跟踪精度高、适应性强的特点。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
空间科学学报(2020年4期)2020-04-22
物理实验(2019年1期)2019-02-13
电子制作(2018年23期)2018-12-26
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
小学阅读指南·高年级版(2016年1期)2016-09-10
电子制作(2016年23期)2016-05-17
河南科技(2015年18期)2015-11-25
电源技术(2015年7期)2015-08-22