一种冗余转向系统的新设计
2021-04-07 13:34:04张博牛占占曹伟
汽车实用技术 2021年6期
张博,牛占占,曹伟
一种冗余转向系统的新设计
张博,牛占占,曹伟
(联创汽车电子有限公司,上海 201206)
智能驾驶是汽车技术发展的方向,是国家2025支持需要突破的核心技术之一,冗余转向系统是智能驾驶中承上启下的转向系统,冗余技术是其中的关键技术之一。论文设计了一种新型冗余转向系统,包括架构、时序图和助力保持关闭流程图,为冗余技术的工程化打下了基础。
冗余转向;时序;助力保持
前言
转向系统是整车上最关系到驾乘人员人身安全的总成之一,必须考虑冗余设计,保证在任何情况下都可以提供基本、可控的转向能力[1]。
当前电动助力转向系统EPS由电控部分和机械结构两部分组成,在电控部分失效的情况下,驾驶员可通过管柱等机械结构驱动转向,因此机械结构可视作转向系统的备份。而在未来无人驾驶场景下,如果EPS电控部分失效,由于没有驾驶员操控方向盘,无法使用EPS机械结构作为冗余备份,从而将导致转向彻底失效[2]。因此,为了满足无人驾驶的功能安全要求,开发冗余设计的EPS系统成为了转向技术发展的必然方向,是迈向完全取消管柱等机械结构的线控转向系统开发的必由之路[3]。
1 冗余转向系统架构设计
冗余技术是未来智能驾驶的核心技术之一,有着很高的研究价值[4]。一种新型冗余转向系统架构设计如图1所示:
(1)由一路完整的电控系统变为两路完整的电控系统,即图中左右两侧的完整的电控系统。
(2)增加每一路电控系统的硬线连接“SBC端的SSC”与“MCU端的GPIO”,“左侧MCU端的SMU”与“右侧MCU端的CAPTURE”两个功能块,“右侧MCU端的SMU”与“左侧MCU端的CAPTURE”两个功能块。
如图2所示,冗余转向电控系统,主要由两路独立、完整的电控系统实现冗余功能。两侧ECU都实现完整控制功能,正常工作时,通过协同模块以主ECU的指令控制两侧电机进行助力输出;失效时,切换到从ECU的指令控制两侧电机输出或单个ECU控制单侧电机输出。
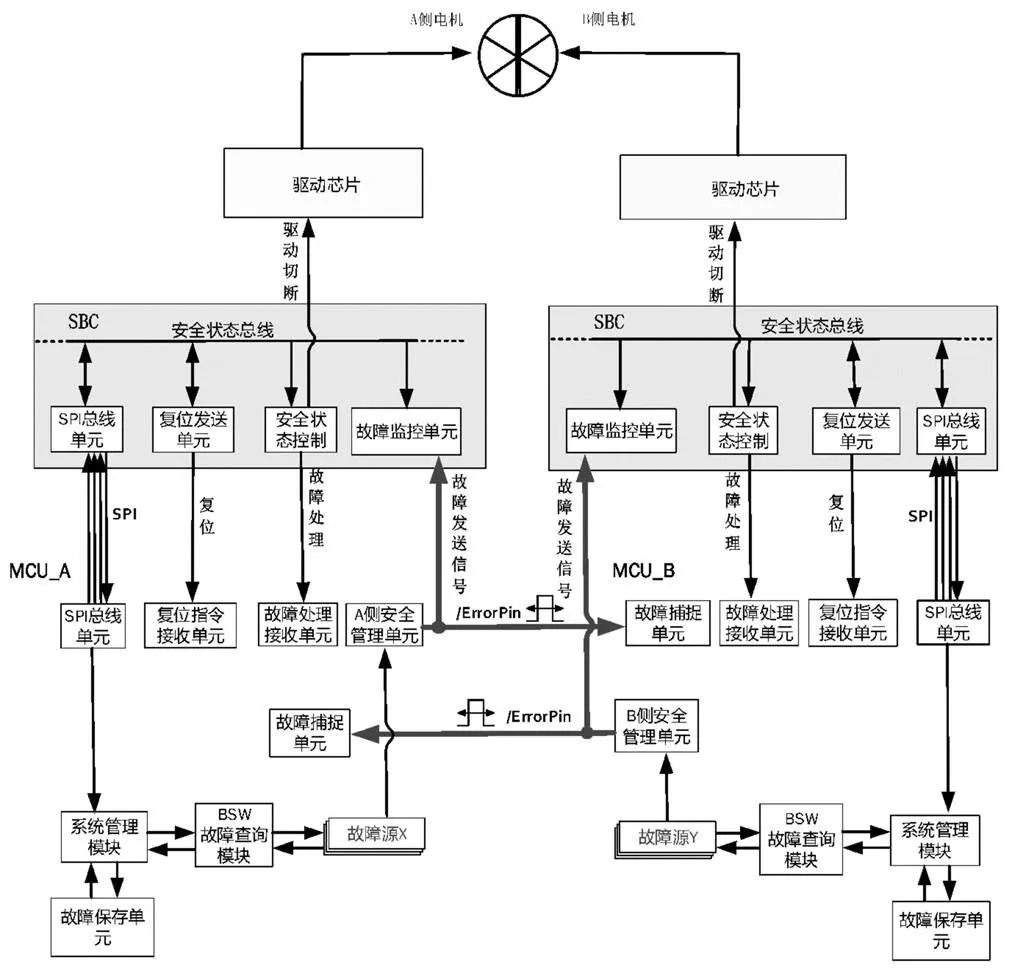
图1 冗余转向系统架构设计图
2 冗余转向系统助力维持方法
冗余技术核心内容之一就是如何能在系统失效的时候保证系统助力[5]。如图2所示,系统助力关闭的流程步骤也就比较重要。
如下:
步骤一:在正常工作下,MCU_A的SMU模块向SBC_A和MCU_B发送特定的PWM方波信号,同理,MCU_B向SBC_B和MCU_A发送PWM方波信号,EPS系统提供100%助力,Motor_A与Motor_B各提供50%助力;
步骤二:如图2所示,在某个时刻,MCU_A触发时钟故障(CLOCK FAULT),则MCU_A停发PWM方波信号,此时EPS系统仍为100%助力;
步骤三:当SBC_A无法接收PWM方波信号,则经过△T1(5-10ms)时间SBC_A向驱动芯片发送SS1指令,则切断A侧电机助力,此处属于硬关断,不受软件影响,Motor_B助力仍为50%,EPS系统提供50%助力,EPS系统仍未50%助力;
步骤四:同时SBC_A向MCU_A发送ROT指令,MCU_A进入复位模式,此时 Motor_A助力变为0,Motor_B助力仍为50%,EPS系统提供50%助力,EPS系统仍未50%助力;
步骤五:经过△T3(不同的故障源对应不同的△T3长度,范围为10-100ms),MCU_A中的CAN通信模块停止向MCU_B发送CAN数据帧,并且连续停发超过△T4(5-20ms);
步骤六:在触发MCU_A复位初始化后,经过△T2(5-20ms),SBC_A向MCU_A发送SS2指令,MCU_A进行故障善后处理,并保存故障参数,EPS系统仍未50%助力;
步骤七:经过△T3(5-20ms),MCU_A完成故障处理完成,故障参数记录完毕后,进入FailSilence Mode,EPS系统仍为50%助力;
步骤八:在触发MCU_A复位初始化后,经过△T3(不同的故障源对应不同的△T3长度,范围为(10-100ms),MCU_A中的CAN通信模块停止向MCU_B发送CAN数据帧,并且连续停发时间保持△T4(5-20ms);
步骤九:MCU_A中连续停止向MCU_B发送CAN数据帧保持△T4,并且整个过程未触发PWM方波信号,经过△T5(<5ms);MCU_B进入TakeOver Mode,MCU_B同时控制Motor_A、Motor_B,EPS系统恢复100%助力。
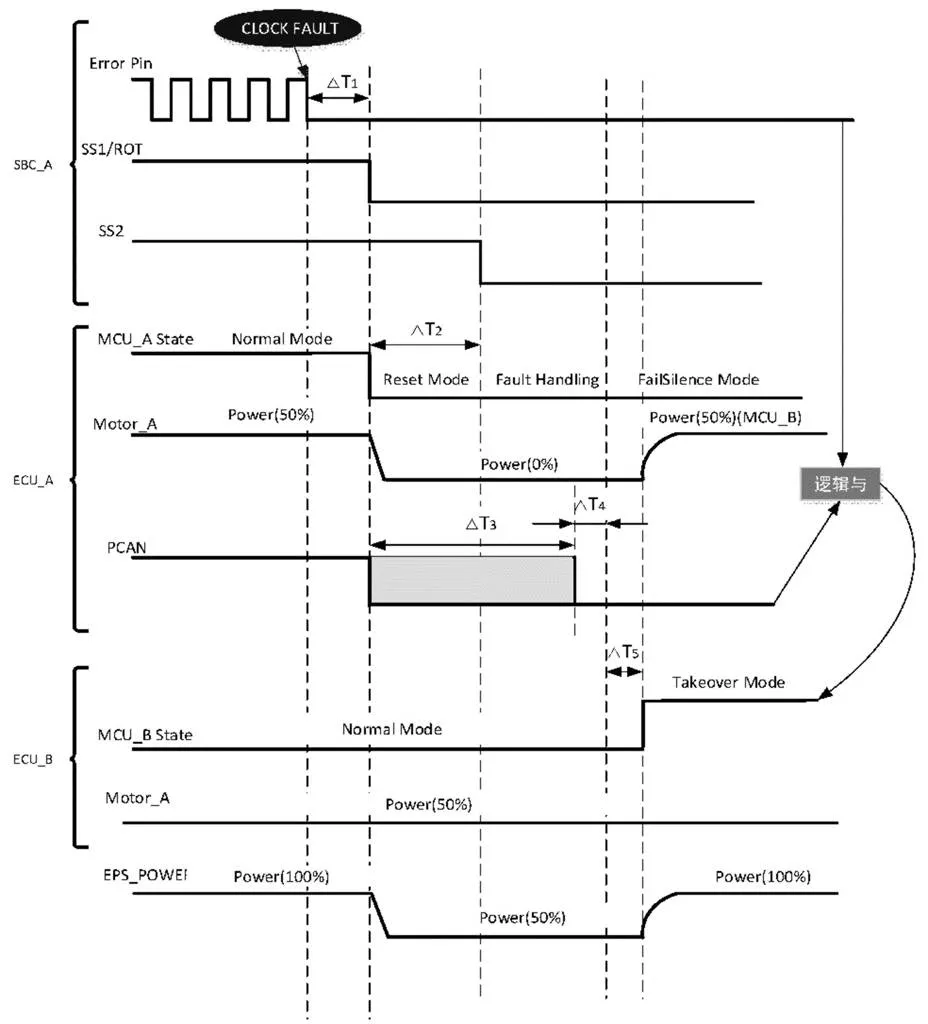
图2 系统助力关断时序图

图3 助力关闭处理流程图
3 结论
(1)本设计在控制逻辑上,保证MCU_A与SBC、MCU_A与MCU_B间的通信是实时双向的数据交互的实时监控协议,更为严谨。
(2)本设计在功能安全上,确保程序运行异常或者某一侧硬件电路异常时,统一由硬件关断路径实现关闭某一侧电机助力,同时维持另一侧电机助力,然后根据故障形式判断另一侧MCU接管两侧电机的动作,降低了中断响应和故障确认时间,大大缩短系统响应时间的同时增加可靠性。
(3)在迎合未来的智能驾驶发展趋势的考虑下,本设计在车辆道路功能安全方面可以与未来的线控转向系统无缝衔接,说明本设计潜力巨大。
[1] 岳法,刘春梅.浅谈电动助力转向系统发展趋势[J].汽车实用技术, 2018,05(35):37-39.
[2] 赵万忠,徐晓宏,赵婷.新型汽车动力转向技术发展综述[J].汽车工程学报,2012,07(06):33-38.
[3] 徐平,郑虎.自动驾驶中的电动助力转向系统[J].汽车电器,2018 (06):28-31.
[4] 廖林清,石宏春,张君,王伟.汽车电动助力转向系统性能测试系统设计[J].重庆理工大学学报(自然科学),2018(06):41-46.
[5] 任夏楠,邓兆祥.汽车EPS阻力特性设计方法研究[J].机械科学与技术,2014(08):1255-1232.
[6] 朱琳琳,张梦炎,张晓丹,俞侃.自动驾驶汽车的线控转向控制系统[J].信息技术,2020,44(08):45-49+54.
A New Design of Redundant Steering System
Zhang Bo, Niu Zhanzhan, Cao Wei
(Lianchuang Automotive Electronics Co., Ltd., Shanghai 201206)
Intelligent driving is the direction of automobile technology development, and it is one of the core technologies that need to be broken through for national support in 2025. Redundant steering system is a steering system that links up and down in intelligent driving. Redundant technology is one of the key technologies. It is always helpful.,Very important. The author designed a new type of redundant steering system including architecture, timing diagram and power-assisted keep-off flow chart, laying the foundation for the engineering of redundant technology.
Redundant steering; Timing; Power-assisted maintenance
10.16638/j.cnki.1671-7988.2021.06.011
U462.1
B
1671-7988(2021)06-35-03
U462.1
B
1671-7988(2021)06-35-03
张博(1980.1-),男,籍贯:安徽砀山,硕士,高级工程师,就职于联创汽车电子有限公司。研究方向:智能网联测试及产品创新。
猜你喜欢
经营者(2024年1期)2024-03-19 02:02:34
英语世界(2022年9期)2022-10-18 01:11:18
金桥(2020年9期)2020-10-27 01:59:44
中学生数理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
商周刊(2017年17期)2017-09-08 13:08:58
电镀与环保(2016年3期)2017-01-20 08:15:29
汽车维修与保养(2015年2期)2015-04-17 01:30:41
深圳大学学报(理工版)(2015年5期)2015-02-28 16:21:22
武夷学院学报(2014年5期)2014-07-19 10:08:27
实验技术与管理(2014年9期)2014-03-11 18:37:38