
自清洁扫拖烘扫地机器人的设计与实现
2021-04-05 08:59王星宇孙京诰
现代信息科技 2021年17期
王星宇 孙京诰


摘 要:随着智能化的时代到来,清洁类移动机器人逐渐代替了传统的人工清洁工作,通过功能模块化的设计,搭载智能化软件算法控制水箱及水泵实现自动洗拖布,引入LDS激光导航实现快速定位建图,建立TOF感知模型实现无接触式的避障和回充,从而设计出具有吸尘、拖地、烘干等多种清洁功能的机器人,解决了市面上大多数移动机器人功能单一、清扫效率低下等问题。
关键词:LDS;TOF;扫拖烘;自清洁;扫地机器人
中图分类号:TP242.6 文献标识码:A 文章编号:2096-4706(2021)17-0155-04
Abstract: With the advent of the intelligent era, cleaning mobile robots gradually replace the traditional manual cleaning work. Through functional modular design, intelligent software algorithm is equipped to control the water tank and water pump to realize automatic mop washing, LDS laser navigation is introduced to realize rapid positioning and mapping, TOF perception model is established to realize contactless obstacle avoidance and recharge, Thus, a robot with multiple cleaning functions such as dust collection, mopping and drying is designed, which solves the problems of single function and low cleaning efficiency of most mobile robots in the market.
Keywords: LDS; TOF; sweeping+dragging+drying; self cleaning; sweeping robot
0 引 言
智能清洁类机器人可以实现智能化的室内清扫,结合了机械运动学、电子技术、路径规划、传感器技术等多学科[1],受到了国内外厂商和研究人员的关注。扫地机器人是一种智能化的吸尘器,它能够在未知的环境中,利用多种传感器技术对周边的环境进行感知,并结合路径规划等运动算法,最终实现家居的高效清洁。市面上大多数扫地机的清扫效率低,此款机器人采用大吸力风机实现高速吸尘,双水箱基站集成多种清洁功能,大大提高了清洁的效率。路径规划作为移动机器人的关键性技术,是国内外的研究重点,因而采用了LDS(Laser Direct Structuring)进行定位导航,同时建立TOF(Time of flight)感知模型,实现有效避障。
1 硬件设计系统
扫地机硬件系统设计主要包括主机和清洁坞两大部分,主机负责清洁地面,清洁坞负责给主机清洗拖布及供电。
1.1 主机硬件系统设计
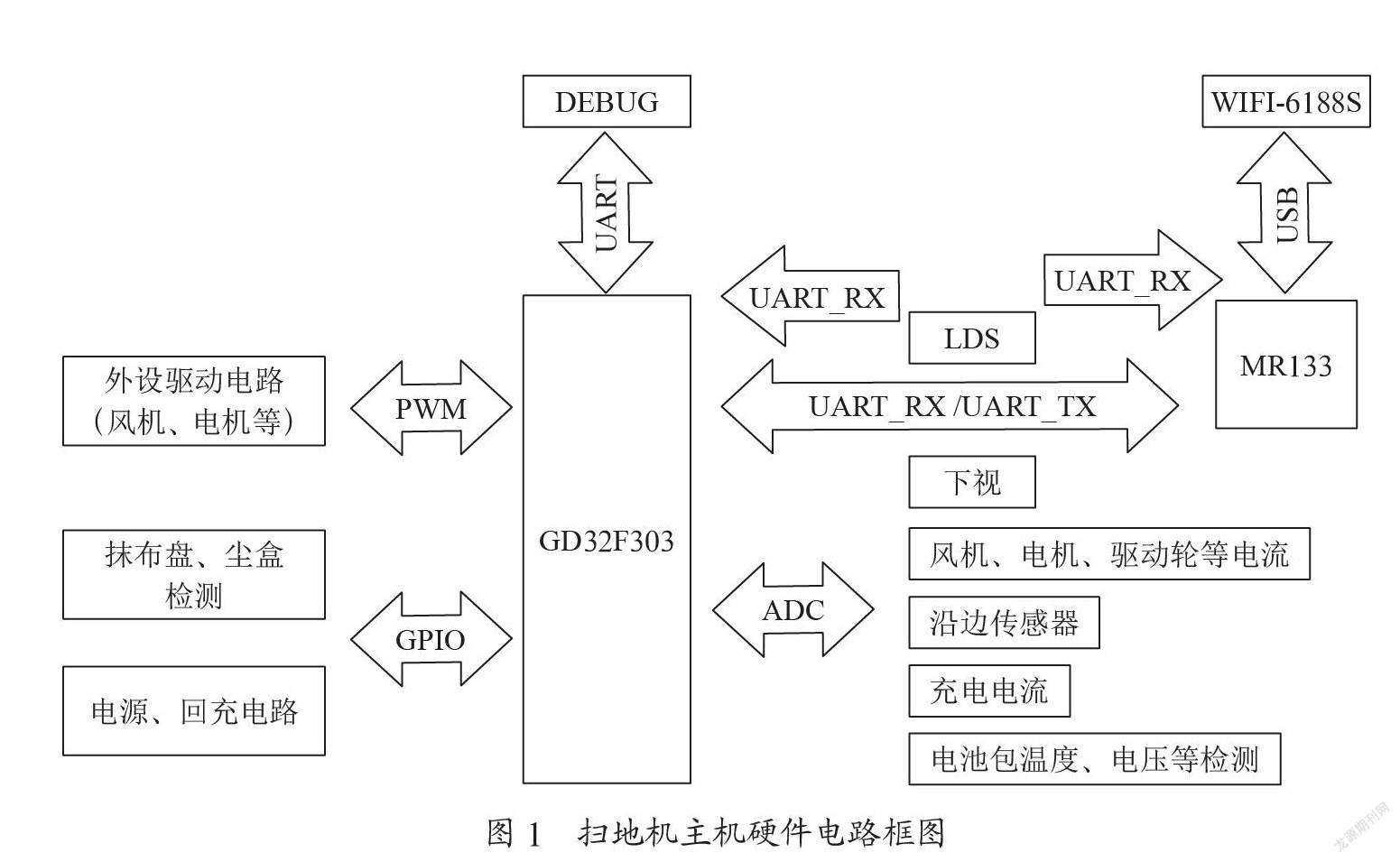
图1为主机硬件系统的电路框图,主机MCU控制单元选取了GD32F303芯片,通过GD32的PWM功能来控制其风机、抹布驱动电机转速;利用霍尔传感器判断抹布和尘盒是否安装;采样电路主要采集的是下视、外设电机电流、传感器、充电电路电流、电池包的温度及电压等;通过LDS激光导航实现路径规划及定位,同时引入TOF模组感知外界环境中的数据实现快速避障,最后将数据传送给MCU和MR133中。
1.2 清洁坞硬件系统设计
清洁坞的红外回充发射电路给主机发送回充信号,主机接收到信号后才开始进行回充;UI人机交换界面的设计可实现按键或者APP控制来实现对主机的清洗、暂停、回充等功能;霍尔检测电路主要实现对清洗盘的安装检测、污水箱清水箱的安装检测等;外设驱动电路的设计主要通过MCU来控制风扇、PTC、水泵、电磁阀、流量计等电子件的驱动,从而完成清洗、烘干的逻辑。图2为清洁坞硬件电路框图。
2 自清洁扫地机的软件清洁逻辑
2.1 清洗过程
电磁阀配合流量计实现对水流量的实时检测,当流量超过预设的标准时,通过软件补偿减小水泵的驱动电机,从而达到减少水流量的目的。清水泵负责抽取清水箱中的水,通过内部管道机构,下水到清洗盘底部,从而完成对主机拖布的清洗。污水泵负责抽取清洗盘底部中集成的污水,从而实现对污水的存储。鼓风机配合PTC,通过导风管吹出热风到清洗盘底部,从而实现对潮湿拖布的烘干。
整機清洗逻辑为:
(1)第0 s~44 s:电磁阀开启后,清水泵开始动作开始下水。
(2)第36 s~44 s:污水泵开始抽水。
(3)第44 s~115 s:清水泵、污水泵均处于关闭状态,只进行拖布的高速旋转。
(4)第115 s~125 s:污水泵开启,进行二次抽水。
(5)第125 s~134 s:污水泵停止工作,同时关闭拖布,准备进入烘干状态。
(6)第134 s:语音播报,鼓风机和PTC同时打开进入烘干模式。
2.2 主机清洁状态转换
图3为主机系统状态转换模块,定义了扫地机的三种模式选择:回充、清扫、暂停。
2.3 自动清洁模式
自动清洁模式分为两种,按面积和按房间清洗:
(1)按面积自动清洗。当主机清洗完5平方米区域后,自动返回基站洗拖布,洗完后继续从当前状态开始处理。
(2)按房间自动清洗。按照地图定位的房间号依次处理。
3 自清洁扫地机的路径规划系统
路径规划系统是扫地机最重要的部分,通过LDS激光导航可实现快速建图,同时建立TOF感知模型可以实现有效地避障,主要过程为[2]:
使用LDS激光导航进行定位建图及算法框架的搭建步骤为:
(1)从环境中获取雷达点云、里程计信息。
(2)通过点云与点云、点云与地图匹配定位。
(3)通过定位信息将点云映射到地图,从而完成地图的更新。
(4)保存上述地图。
3.1 基于LDS的清扫行动轨迹
基于LDS的清扫行动轨迹主要有以下几种:
(1)先沿边清扫,后弓字形清扫。扫地机启动后,首先沿着目标区域的边界清扫一整圈,建立区域轮廓。沿边结束后,在轮廓内规划出整齐的弓字形路线。这种LDS激光导航可快速构建房屋轮廓,高效清扫。
(2)弓字形清扫避障。遇到障碍物时,机器会绕开障碍物清扫一圈,然后继续走弓字,行走的轨迹十分简洁,提高了清扫的效率。
(3)智能规划路径。机器清扫完后,依据清扫时探测到的环境信息,智能选择下一块清扫区域,并规划出最佳路径。机器会重复以上步骤,直到清扫完所有的目标区域。
清扫行动轨迹如图4所示。
3.2 基于TOF避障的感知模型
3.2.1 TOF测量原理
TOF雷达避障是通过测量光的飞行时间来计算物体的距离。光路返回时通过光接收器实现,光源发射光脉冲开始到光脉冲被探测器接收的这段时间,与光的飞行速度的乘积就是所需测量距离结果的两倍[3]。设定光波发射时间为T1,接收器接收到回波的时间为T2,则可通过测量该时间间隔TOF来计算激光测距仪与物体之间的距离L。
根据激光测距仪坐标系与扫地机坐标系的互相关系,可以推算出感知量Zk与X(k)之间的函数关系,即传感器模型。
(3)基于TOF的避障过程:
1)计算参考面:通过地面点云来计算参考面,参考面以上的视为物体的点云。
2)初步点云分割:滤波所有不可信的点,然后根据高度分割点云。
3)IR辅助二次分割点云:使用IR图帮助分辨物体来决定是避障还是越障。
4)建立障碍物累积地图:建立地图,并传送给规划的二维点云。
3.3 融合硬件设计
利用LDS传感技术,搭载TOF模组,进行硬件原理图的设计。通过TOF感知到的图像信息与LDS进行融合,将LDS的接收信号LDS_TX传送给MCU中,通过MCU内部数据处理,实时判别机器的位置信息,从而完成定位和避障。
4 清洁效果测试
清洁效果一直是清洁机器人研究领域中的难题,会直接影响到用户的体验感。因此,通过清洁效果测试来验证此款扫地机结构模块、软硬件模块设计的合理性。在相同时间内,扫地机通过该区域,将地面上的灰尘吸取到尘盒中,计算尘盒前后的变化量?x,即可得出吸取灰尘的清扫效率,测试画面如图5所示,测试数据如表1所示。
由此可见,清洁机器人清扫一段地面的过程,通过吸取地面灰尘前后的对比可知,地面灰尘总体上被清理干净,清扫灰尘的效果满足性能要求。
5 结 论
本论文完成了自清洁扫拖烘机器人的设计,采用多种传感器进行功能模块化的设计,通过LDS激光雷达进行地图的定位,同时建立TOF感知模型进行高效地避障。在硬件系统的架构上,引入智能化的软件清洁逻辑,实现吸尘除灰、清洗、烘干、回充等多种功能。实测表明,所设计的自清洁机器人可以实现有效避障,提高清扫效率。
参考文献:
[1] 王鹏.全球服務机器人:待掘的金矿 [J].机器人产业,2015(2):46-53.
[2] 段荣杰.室内环境下移动机械臂的目标抓取技术 [D].太原:中北大学,2019.
[3] 段志坚.基于3D-TOF图像传感器采集系统的设计与实现 [D].长沙:湘潭大学,2015.
[4] 刘洞波.移动机器人粒子滤波定位与地图创建方法研究 [D].长沙:湖南大学,2013.
[5] 蒋燕.基于多传感器信息融合的同步定位与地图创建研究 [D].长沙:湘潭大学,2009.
作者简介:王星宇(1996.04—),男,汉族,江苏镇江人,硕士在读,研究方向:控制工程。
