多学科交叉的危化品运输安全保障技术及动态演示
2021-04-02 03:51胡金瑞
安全与环境工程 2021年2期
郭 健,胡金瑞
(浙江工业大学桥梁工程研究所,浙江 杭州 310023)
我国危险化学品(简称危化品)运输安全形势依然严峻。据统计,77%的危化品事故发生在道路运输过程中,碰撞、侧翻是其最主要的事故形态。我国华东地区石化基地分布广泛,危化品公路运输量大,事故风险高。过去三年仅在浙江地区就发生了20多起危化品道路运输事故,特别是2020年6月13日在浙江温岭发生的危化品罐车侧翻,导致了严重的爆炸事故,造成了重大人员伤亡和财产损失。危化品事故易导致危化品泄漏进而引发燃烧、爆炸等严重后果,造成财产损失、环境污染、生态破坏、人员伤亡等恶劣影响,因此提高危化品公路运输安全保障性就显得尤为迫切。目前可从完善风险防范体系、减少监控盲区、提升事故主动防控能力和协同监管能力等几方面的工作来提升危化品运输安全,从而提升道路运输重特大事故防控能力。
本文依托国家重点研发专项项目,从事故防控和运输过程监控这两个方面来进行介绍。其中,事故防控包含侧翻事故主动防控技术和泄漏事故主动防控技术,主要介绍车辆发生侧翻前的主动防控和侧翻后的应急救援;运输过程监控包含重点区域车路协同监控技术和车辆识别跟踪及安全预警技术,主要介绍车辆运输过程中车体—路侧的信息交互和运输车辆信息、异常驾驶行为的识别。作为危化品运输的安全保障,智能交通领域的车路协同、智能识别、安全预警、灾情防控等关键技术是未来保障车辆运输安全的发展方向,也将为我国危化品安全运输提供有力的技术保障。
为了将多学科技术进行集中示范,本文选取宁波镇海石化基地至杭州湾跨海大桥的高速运输线为工程背景,设计研发了一套区域动态场景沙盘,其可实现物理沙盘中动态罐车在控制系统作用下的全过程运动场景演示,同时根据罐车事故风险动作及场景变化,制作动态视频来演示重点区域车路协同监控技术、车辆识别跟踪及安全预警技术、侧翻事故主动防控技术和泄漏事故主动防控技术等一系列危化品公路运输过程中的关键技术环节和安全保障技术的应用效果。
1 危化品运输安全智能化管控的关键技术
危化品公路运输安全保障技术是多学科知识领域的技术集成,涉及交通工程、信息工程、应急防灾、车辆工程等领域的一系列关键技术。这些关键技术内容多、核心知识点复杂,贯穿于整个危化品公路运输的全过程。
1. 1 重点区域车路协同监控技术
车路协同监控技术可对路网内车辆进行全局性统筹,是未来智能交通的主要发展方向。该技术主要布设有路侧单元(RSU)和车载单元(OBU),如图1所示。其中,OBU主要以收集车辆信息和语音报警为主,通过安装在车上的传感器收集车辆行驶过程中的侧向加速度、侧倾角等信号;RSU主要收集车辆以外的信息,如道路位置、前方道路施工、匝道车辆汇入等一系列信息,RSU收到信息后对其进行编码,再以无线的方式向OBU发送识别码,OBU通过解码获取的信息来发出相应的预警,提醒驾驶员采取措施。同时,OBU和RSU的信息实时传送至远程控制中心,监管人员能实时了解车辆运行情况,如利用三点定位算法,准确计算出车辆在弱信号区域的实时位置(见图2)。若车辆行驶在如隧道、山区、跨海大桥等弱信号区域,则需增设扩频设备(见图3),将OBU和RSU的信息传送至远程控制中心。

图1 车路协同监控技术布设Fig.1 Arrangement of vehicle and road collaborative monitoring technology
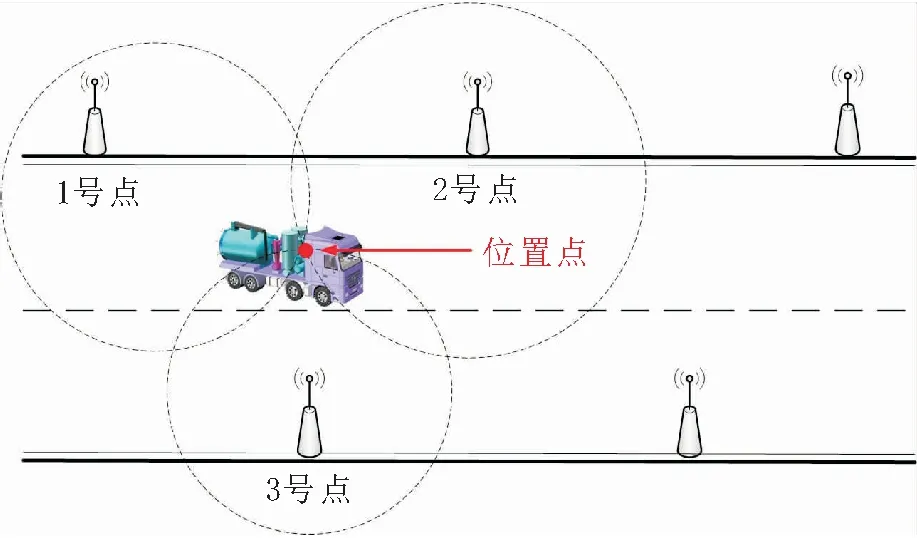
图2 三点定位算法Fig.2 Three point positioning algorithm

图3 扩频设备Fig.3 Spread spectrum equipment
1. 2 车辆识别跟踪及安全预警技术
危化品运输不同于普通货物运输,根据交管部门的规定须对车辆进行严格监控。交管部门通过引入基于超高频射频技术的汽车电子标识,可了解行驶车辆的具体信息,该电子标识如同人的身份证,里面包含车辆的各类信息,如车牌号、年检信息、驾驶员的驾龄、报废年限等;当车辆行驶至重要节点如收费站时,接收设备便收到电子标识发出的高频信号,交管部门就可及时了解车辆信息,并判断是否准许其过卡上路,见图4。危化品车辆在行驶过程中,驾驶员是一类较大的主观影响因素,基于多源数据的异常事件与行为辨识方法,可对驾驶员的打电话、疲劳驾驶、抽烟、分神驾驶等多种典型异常驾驶行为进行辨别,见图5。大数据监控平台作为车辆行驶信息的汇总平台,如上述的电子标识信息、异常驾驶行为信息以及车速、车辆位置等信息都在此平台汇总,并运用大数据分析技术对车辆行驶安全性进行综合研判,见图6。

图4 电子标识识别图Fig.4 Electronic identification diagram

图5 驾驶员异常行为识别Fig.5 Driver abnormal behavior recognition
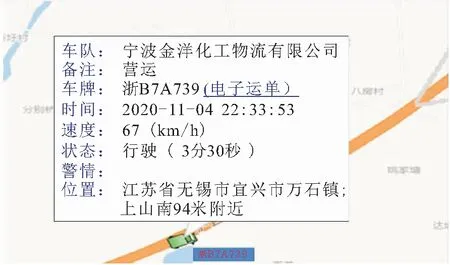
图6 大数据监控平台Fig.6 Big data monitoring platform
1. 3 侧翻事故主动防控技术
危化品运输罐车具有惯性大、质心高、液体扰动等特殊性和复杂性,在运输过程中发生侧翻事故的概率较高。针对这类事故,侧翻事故主动防控技术分事前预警和事中综合控制两阶段防控,见图7。其中,事前预警主要基于车路协同的多源信息融合感知,通过RSU与OBU进行信息交换(见图8),当车辆有侧翻趋势时,进行警示,使驾驶员进行有效操作;当车辆侧翻趋势进一步扩大,接近侧翻安全阈值时,车辆液压互联悬架系统介入,通过分析车体的侧倾程度,计算油罐两侧所需的调节角度,发出相应指令给四个油缸,智能调节车辆悬架,使车辆达到平衡状态(见图9);当车辆行驶至稳定路况时,两侧液压装置自动恢复。

图7 侧翻事故主动防控图Fig.7 Active prevention and control diagram of rollover accidents

图8 车载单元(OBU)与路侧单元(RSU)信息交互Fig.8 Information interaction between vehicle unit (OBU) and roadside unit(RSU)

图9 车辆液压互联悬架系统Fig.9 Hydraulic interconnected suspension system of vehicles
1. 4 泄漏事故主动防控技术
危化品运输罐车一旦发生泄漏事故,不仅会对周围环境造成严重的污染,更为严重的是外漏的危化品将引发火灾、爆炸等二次事故,对人员生命和财产安全构成严重的威胁。泄漏事故主动防控技术可有效地保障消防人员对泄漏事故现场进行及时、有效的处置。首先,消防人员利用事故现场侦检装备(见图10和图11)来判断现场情况;随后,消防人员利用外封式堵漏装置(最大堵漏压力大于0.15 MPa,最大堵漏本体尺寸为2 500 mm,见图12)来进行堵漏;最后,消防人员利用多功能收纳车(收纳容积大于10 000 L,收集颗粒度大于80 mm,无线遥控距离为50 m,见图13),及时将已泄漏至地面的液体收纳干净。

图10 线式检测法Fig.10 Linear detection method

图11 面式检测法Fig.11 Plane inspection method

图12 外封式堵漏装置Fig.12 External sealing plugging device

图13 多功能收纳车Fig.13 Multi functional storage vehicle
2 危化品运输安全保障关键技术集成应用示范
2. 1 工程背景
我国在东部沿海区域分布有七大石化基地,其中环杭州大湾区有2个,分别为宁波镇海石化基地和上海漕泾石化基地。随着投资2 000多亿的舟山鱼山绿色石化基地的建成,危化品运输在该地区的运输量将会极大地增加,事故风险也将会增大。因此,选取该地区的实际危化品运输路线作为沙盘研发背景具有典型的代表性和实际意义。本文选取了宁波镇海石化基地至杭州湾大桥的高速公路线路作为沙盘演示线路,见图14。该线路具有桥隧比高、车流量大、路况较复杂、道路运输安全风险高的特点。

图14 危化品运输安全保障关键技术的沙盘演示线路Fig.14 Sand table demonstration route of key technology of transportation safety of hazardous chemicals
2. 2 演示方案
根据实际路线设计出如图15所示的危化品运输安全保障关键技术动态演示流程。该动态演示流程主要以实体罐车模型在导轨系统作用下的场景沙盘上进行分阶段行进,并利用多媒体控制技术对危化品运输安全保障关键技术进行动态演示。主要采用实体罐车模型加声光电多媒体展示的方式,使观者能清晰、直观地了解危化品智能运输所涉及的各类主要知识环节,见表1。
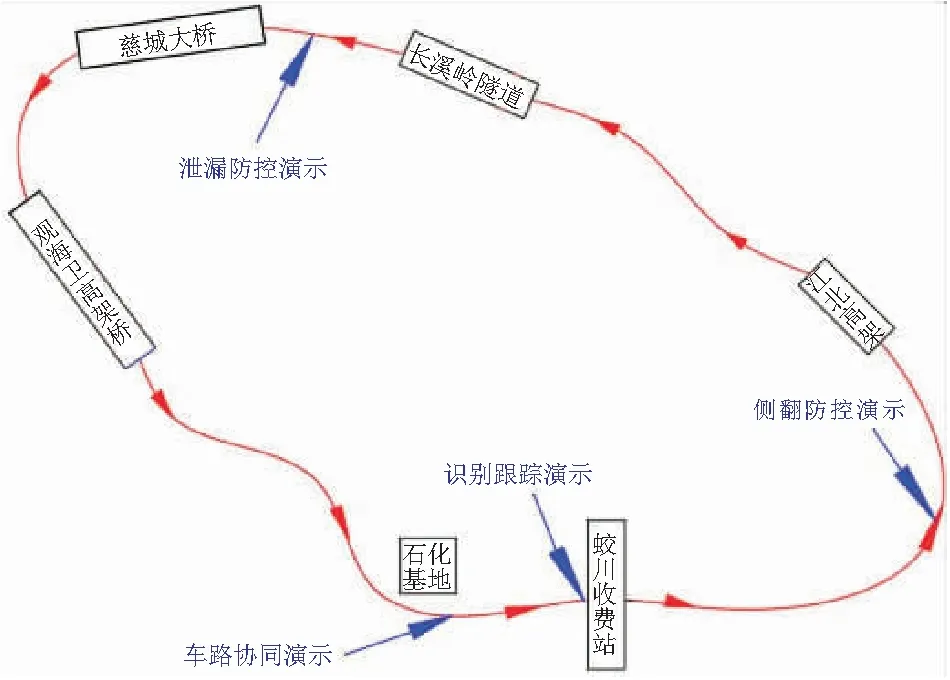
图15 危化品运输安全保障关键技术动态演示流程Fig.15 Dynamic demonstration process of key technology of transportation safety of hazardous chemicals
2. 3 演示关键技术
动态场景沙盘模型中包含了实际运输路线中的山体、水域、公路、桥梁、隧道、高速路口收费站、石化基地等场景要素,用到的关键技术有RFID技术、单片机控制技术、磁传感器技术和视频图像处理技术等。

表1 危化品运输安全保障关键技术动态演示的主要知识环节
场景沙盘动态演示以罐车跑动与各场景事件为流程进行,这就要求车辆行驶与技术视频演示做到无缝衔接,故采用“点位法”对车辆行驶与视频播放做到精准的定位定时。如轨道施工时在各技术演示点嵌入车辆传感器,再将车辆传感器接入控制单元(见图16),完成车辆与视频的无缝对接。

图16 位点控制流程图Fig.16 Flow chart of locus control
罐车在场景沙盘上行驶的过程中,屏幕实时显示车辆的位置,以体现实时跟踪定位。为了实现这一演示效果,采用三帧间差分技术来实现。相比于两帧差分目标重叠部分难以检测、易出现空洞现象的局限性,三帧差分将相邻三帧图像作为一组进行再差分,能够较好地检测出实际运动目标的轮廓。
3 结 论
为了全面提升道路运输重特大事故的防控能力,保障危化品公路运输安全,本文从事故防控和过程监控两方面对危化品公路运输过程中安全保障所涉及的四大关键技术进行了详细阐述,同时借助动态场景沙盘对涉及多学科知识领域的关键技术进行了集成应用示范,使人们对危化品公路运输过程中的安全保障技术有了全方位了解。研究表明:数据传输及处理、信息融合及决策、大数据分析等新兴信息技术与传统桥梁隧道技术交叉融合是未来智能交通发展和人才培养的大方向。
猜你喜欢
江苏安全生产(2022年8期)2022-11-01
建材发展导向(2022年12期)2022-08-19
当代水产(2022年2期)2022-04-26
水上消防(2021年5期)2022-01-18
山东青年报·教育周刊学生版下半月(2021年4期)2021-12-08
今日农业(2021年13期)2021-11-26
今日农业(2021年16期)2021-10-14
海峡科技与产业(2021年1期)2021-05-22
福建基础教育研究(2020年1期)2020-05-28
劳动保护(2019年7期)2019-08-27