台区智能监测系统相位识别技术的研究与实现
2021-03-29 10:02
物联网技术 2021年3期
(北京国电通网络技术有限公司,北京 100192)
0 引 言
目前我国配电网设备数量大、分布广,运行环境复杂。针对线路故障类型、故障停电范围、保险跌落或开关跳闸位置等缺少行之有效的监测和预判手段。由于工作人员对现场情况不了解,误判时有发生,导致维修方案不合理、抢修力量配置失当,延长了故障排除时间,影响了供电质量,造成了较大的经济损失和社会影响。为了实现三相负载平衡治理、停电故障准确定位、线损精益计算,需要对线路相位进行准确识别。本文基于LoRa无线通信、过零检测电路实现相位识别技术的研究,并搭建智能监测系统,完成对低压配电台区用户的相位识别[1-2]。
1 相位识别理论基础
我国工频三相电力供电系统周期T为20 ms,相位差为120°,在时间上三相交流电信号的正向过零点(或反向过零点)相差约6.67 ms,如图1所示。

图1 三相过零时序图
在低压配电台区中,正确识别智能电表所在相位,只需监测智能电表监测单元端的工频电压过零点与台区集中器参考相线工频过零点的相位时间差值,即可获得相对相位信息,实现相位精确识别[3]。
2 LoRa无线通信
LoRa是一种超长距离、低功耗的数据传输技术,与其他通信方式相比,LoRa无线通信利用先进的扩频技术和编码方案,具有良好的抗干扰性。
基于LoRa远程调制解调器的SX1276收发器可用于超长距离扩频通信,抗干扰性强,可最大限度降低电流消耗,接收电流小于14 mA,睡眠电流小于2 μA。接收灵敏度可达-148 dBm,工作频段在401~510 MHz范围内,发射功率最大可达19 dBm,有效通信距离可达5 km。SX1276解决了传统设计方案无法同时兼顾距离、抗干扰和功耗等问题,是满足超长距离扩频通信和高可靠性要求的最佳选择。图2所示为LoRa无线通信方案。
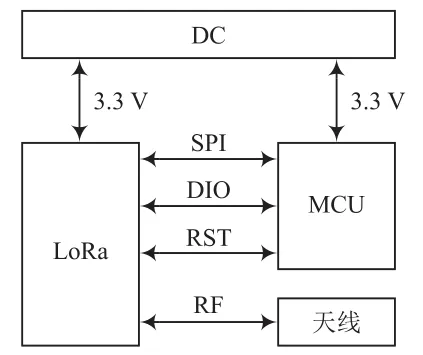
图2 LoRa无线通信方案
LoRa与MCU之间利用SPI通信,DIO通过软件配置可作为MCU发送与接收的中断监控引脚。正是因为有这样的硬件工作机制,当发送中断和接收中断发生时,MCU可精确捕捉接收帧的接收完成时刻及发送帧的发送完成时刻。当MCU定时器时钟节拍设定为100 μs时,可以保证相位识别精确度为0.1 ms。图3所示为LoRa无线通信的相位识别帧接收及发送工作流程。

图3 数据帧接收及发送工作流程
图4所示为通过LoRa无线通信技术进行数据帧发送与接收的通信情况,实验结果可表明发送中断及接收中断间的时间差及其稳定性情况。
由图4(a)可知,相位识别帧发送完成时刻与接收完成时刻之间的时间差值约为560 μs。由图4(b)可看出,相位识别帧发送端时间固定,在时间固定情况下接收时间的误差范围才具有可参考性。由图4(c)可看出相位识别帧接收时间误差在3.88 μs以内,相对发送完成与接收完成的时间差,小范围的计时误差对相位识别基本无影响,可忽略不计[4-6]。

图4 数据帧发送与接收的通信情况
3 过零检测电路
台区集中器和智能电表监测单元内置过零检测电路,对三相过零点进行检测判断,提取每相过零点的时间标签,通过私有协议及算法进行相位计算,从而获得智能电表监测单元的相别信息。
图5是可对220 V/50 Hz信号进行检测的过零检测电路,通过过零检测电路捕获电压的反向过零发生时间点,实现反向过零点检测,TZA给主控制芯片提供过零信号。由图6的检测结果可看出,反向过零周期为20 ms,符合工频三相电力供电系统周期规则,检测灵敏度较高,可利用高阻抗和低噪声的过零时隙实现数据的可靠通信。

图5 过零检测电路

图6 过零检测电路检测结果
4 相位识别
利用LoRa无线通信技术可实现台区集中器与智能电表监测单元间数据帧的接收和发送。
4.1 对时
台区集中器开始工作,从向智能电表监测单元发送完“相位识别起始帧”开始计时,而智能电表监测单元从其接收完“相位识别起始帧”后开始计时,两者各自开始工作后的时间基准不同,所以要对台区集中器及智能电表监测单元进行对时。通过对时这一过程得到固定长度数据帧的单向传输时间T0,以此将台区集中器及智能电表监测单元的时间基准调一致,保证进行过零检测后计算待识别相位时的结果准确性。
台区集中器及智能电表监测单元进入相位识别工作状态后,台区集中器发送“固定长度对时帧”,智能电表监测单元接收到对时帧,待MCU处理完紧急指令后,对此帧进行分析与处理,返回“相同长度的对时应答帧”。因此,智能电表监测单元接收完对时帧与发送完对时应答帧之间有延时,记为Tdelay。
“相同长度的对时应答帧”中包含台区集中器发送完成对时帧的时刻TMT、智能电表监测单元接收完成对时帧的时刻TSR。台区集中器发送“读取智能电表监测单元发送完对时应答帧的时刻”命令帧至智能电表监测单元,智能电表监测单元返回包含其发送完对时应答帧时刻TST的应答帧。台区集中器接收完对时应答帧的时刻为TMR。由此可计算智能电表监测单元接收完成对时帧与发送完成对时应答帧之间的延时时间为:Tdelay=TST-TSR。


图7 台区集中器与智能电表监测单元对时示意图

表1 相位识别对时数据 100 μs
通过对试验采集到的相位识别对时数据进行多次计算,求平均值后得出的固定长度数据帧单向传输时间为500 μs。
4.2 过零检测
台区集中器向智能电表监测单元发送“固定长度过零检测帧”,并记录此后台区集中器A相每个过零点的时刻。智能电表监测单元接收到固定长度的过零检测帧,待智能电表监测单元相位过零点事件发生后,立即向台区集中器回发“固定长度应答帧”,发送完成此应答帧的时间为TST0,将智能电表监测单元相位过零点时刻记为TSZD,两时刻间的延时时间为Tdelay0=TST0-TSZD。台区集中器收到应答帧后,记录接收完成固定长度应答帧的时刻为TMR0。通过得到的固定长度数据帧的单向传输时间T0,可计算智能电表监测单元相对于台区集中器的过零点时间为TSZDM=TMR0-T0-Tdelay0,将此时间与记录的A相每个过零点时间对周期取余后进行比较。表2为试验采集到的相位识别过零检测数据,图8为智能电表监测单元过零检测流程。

表2 相位识别过零检测数据 100 μs

图8 智能电表监测单元过零检测示意图

4.3 相位计算方法
用于计算智能电表监测单元所处相位的三相过零时序图如图9所示。

图9 用于计算智能电表监测单元所处相位的三相过零时序图
对试验采集数据进行计算与分析后,得到的台区集中器与智能电表监测单元过零时间之间的差值TDiffer。根据三相交流电信号的正向过零点(或反向过零点)相差6.67 ms,计算得到智能电表监测单元所处的相位。因存在模块间的交互时延及电信号的传输时延,所以将相位的判别点扩充到区间,根据此差值所落区间来判断智能电表监测单元所处的相位:
对时帧和过零检测帧采用相同长度的时间帧,以保证固定长度数据帧的单向传输时间T0的通用性。通过以上设计,可以精确实现相位识别,对停电故障准确定位具有关键作用。
5 智能监测系统
在智能电表相位识别的应用场景中,待测相位装置是安装在电表箱中的智能电表监测单元,其与电表通过同一单相电源线连接。智能电表监测单元的安装位置和安装方式不受限制。以台区集中器的A相工频过零点为参考过零点,实现对智能电表监测单元所在相位的识别。智能监测系统结构如图10所示。

图10 智能监测系统
台区集中器可通过LoRa无线通信依次识别多个智能电表监测单元的相位,当台区集中器与智能电表监测单元之间无法完成通信时,通过已识别出相位的智能电表监测单元与未实现和台区集中器通信的智能电表监测单元间的通信,以被识别出的智能电表监测单元相位为参考相位,完成智能电表监测单元间的相位识别。
6 结 语
本文采用LoRa无线通信技术结合过零检测电路完成相位识别方法设计,以LoRa无线通信过程中固定发送中断时刻,多次获取到的接收中断时间浮动区间来说明此种通信方式时间误差极小,具有较高的可靠性及稳定性和良好的抗干扰性。利用过零检测电路检测到波形,说明其检测灵敏度极高,完全符合工频三相电力供电系统周期规则。通过试验采集到的通信过程中数据帧的传输时间等数据计算分析试验设备所在相线。由试验结果可知,本文设计的相位识别方法具有很高的相位识别准确率。
在相位识别方法的基础上搭建智能监测系统,实现低压配电台区用户相位的准确识别,对智能电表监测单元及电表等的停电故障实现准确、快速定位,提高配电运维管理水平;改变以往“停电用户报修”的被动形式,实现故障的快速排除,提高用户用电满意度;为三相负载不平衡治理、降低线损等业务提供支撑,有效抑制三相不平衡,正确分析三相不平衡与线损的关系,实现线损精确计算与精益化管理。
猜你喜欢
电子制作(2017年8期)2017-06-05
数学小灵通·3-4年级(2017年2期)2017-05-30
电子制作(2017年2期)2017-05-17
电子制作(2017年4期)2017-04-21
电测与仪表(2014年16期)2014-04-22
电测与仪表(2014年13期)2014-04-04
电测与仪表(2014年1期)2014-04-04
电力需求侧管理(2014年6期)2014-03-20
河南科技(2014年6期)2014-02-27