
基于滑动L2优化准则的GPS坐标时间序列重构
2021-03-26 12:16边家文丁开华陈保周伍浩琛
地理空间信息 2021年3期
周 侗,边家文*,丁开华,陈保周,伍浩琛
(1.中国地质大学 数学与物理学院,湖北 武汉 430074;2.中国地质大学 地理与信息工程学院,湖北 武汉 430074)
GPS监测技术已广泛应用于地壳形变、板块运动监测,地震、海啸预警,参考框架建立与维持等领域,因此精确地分析和估计GPS坐标时间序列具有重要意义。在精确分析和重构GPS坐标时间序列之前,需对GPS坐标时间序列的噪声类型进行分析,国内外学者对此进行了较为全面的研究,如MAO A L[1]等分析了全球23个GPS站点长达3 a的时间序列,结果表明噪声的最佳模型是“闪烁噪声+白噪声”;李昭[2]等分析了中国区域GPS坐标时间序列的噪声类型,结果表明测站最佳噪声模型组合为“闪烁噪声+白噪声”和“带通幂律噪声+白噪声”;在GPS坐标时间序列重构方面,WANG X M[3]和CHEN Q[4]等提出了利用奇异谱分析法(SSA)提取序列周期的方法,SSA方法可以较好地从含噪声的时间序列中提取信息,但在分离噪声时会吸收部分有色噪声;张双成[5]等利用经验模态分解(EMD)方法对GPS坐标时间序列进行了降噪和重构,EMD方法能合理地分离序列中的信号和噪声,有效削弱噪声对GPS坐标时间序列的影响,进一步提高GPS坐标时间序列的精度,但在噪声较大时,会出现模态混叠现象,导致重构效果较差;董伟[6]采用小波分解(WD)方法对GPS坐标时间序列进行了多分解、去噪和重构,WD方法可为任何调制信号建模时变多样的季节曲线,可在限制的频率之间模拟信号和噪声,从而确定分辨率,但不进行信号和噪声之间的分离;LIU N[7]和Didova O[8]等利用卡尔曼滤波方法(KF)对缺失的GPS坐标时间序列进行重构,KF方法的最大缺点是必须用到无限过去的数据。
近年来,Anna等提出利用滑动普通最小二乘法(MOLS)来重构信号。MOLS方法通过选取合适的窗口,滑动利用最小二乘得到每段的估计,最终得到整段GPS坐标时间序列的估计,速度较快,但由于忽略了噪声特性,导致精度较低,且会产生过拟合现象[9]。本文通过L2优化方法来防止过拟合,由于在整段时变周期的GPS坐标时间序列上采用L2优化方法会导致较大的误差,因此将信号分段,逐年滑动,在每段上使用L2优化方法,即滑动L2优化估计方法(ML2),并在每段采用交替迭代乘子法(ADMM)求解。ADMM算法具有分布式运算、并行处理的特点,且在迭代次数较少时能得到合理的精度[10],使GPS坐标时间序列的重构精度更高。
1 模型与重构算法
1.1 GPS坐标时间序列的模型
GPS坐标时间序列的一般模型为:

式中,n=1,2,…,N,N为信号长度;y(tn)为信号;x0和vx分别为初始位置和速度;ai和bi分别是角速度为ωi的周期信号的正弦和余弦项的常数;εt为噪声,本文采用“闪烁噪声+白噪声”的噪声模型;t0为参考时间;tn为时间。
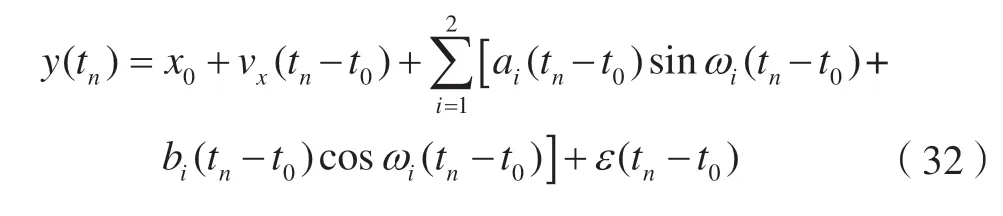
在实际信号处理中周期信号的振幅ai和bi往往会随着时间发生变化[11],因此本文利用的时变周期的GPS坐标时间序列模型为:
式中,ai(t)和bi(t)为时变振幅,假设它们由其均值和随机扰动组成,即ai(t)=ai+μi(t),bi(t)=bi+vi(t),μi(t)和vi(t)为随机扰动,因此需要估计时变振幅的均值。
记:则式(2)可写为:
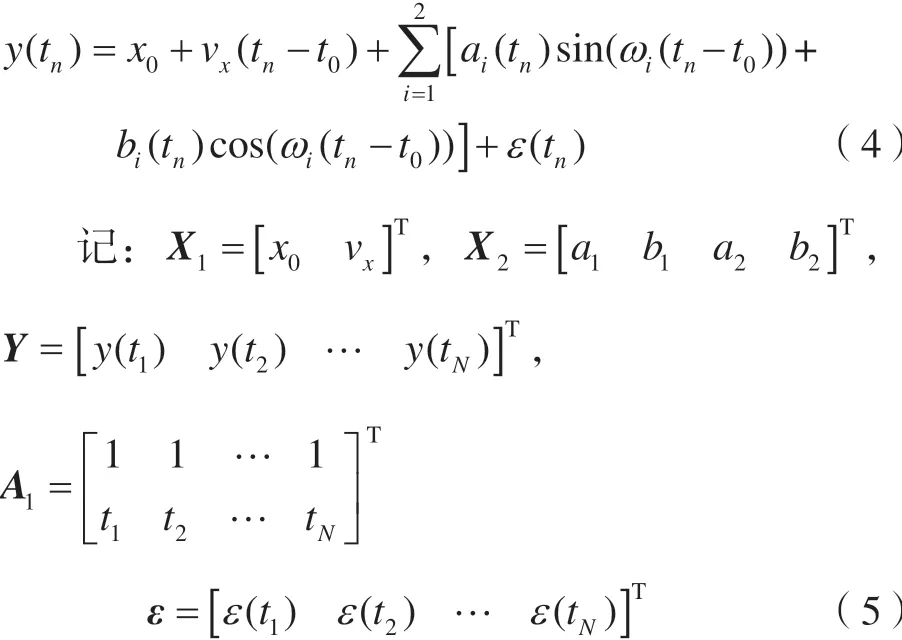

式(2)可转化为式(1),相应的矩阵表示形式为:

式中,A1X1为趋势项;A2X2为周期项;ε为噪声项。
1.2 基于L2优化准则的GPS坐标时间序列重构
1.2.1 优化模型
为了估计周期项和趋势项,建立的优化模型为:

式中,r=Y-A1X1-A2X2;α和β为正则项的参数。本文采用L2范数约束参数X1和X2,防止参数X1和X2过拟合。
1.2.2 ADMM算法
ADMM算法既有乘子法的强收敛性质又有对偶上升法的分解性,因此该方法比较适合求解大规模的优化问题。目前,该方法已广泛应用于压缩感知、图像处理、机器学习等诸多领域。ADMM算法的优点是仅有一个参数ρ,且在一定条件下,其对任意参数均收敛。对于优化问题式(8),可使用梯度下降法求解,但该方法对步长的选择非常敏感,选择不合适的步长甚至会导致算法不收敛;而ADMM算法对步长具有较强的鲁棒性,在一定条件下,能保证对所有的步长都收敛[12]。因此,本文采用ADMM算法求解优化问题式(8)。
构造优化问题式(8)的增广拉格朗日函数,则有:
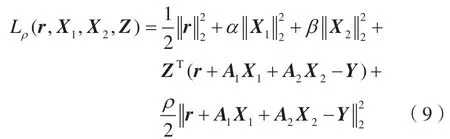
式中,Z为对偶变量并具有适当的缩放尺寸;ρ为惩罚参数[13]。
按照顺序更新变量r、X1和X2,再更新对偶变量Z,即
对式(10)的优化目标函数进行简化,可得:

对rk+1求导,令结果为0,则有:

可得rk+1的迭代公式为:

对式(11)的优化目标函数进行简化,则有:



式中,I2和I4分别为2阶单位矩阵和4阶单位矩阵。
ADMM算法的收敛性由其残差来刻画,其停止准则为:
式中,rpri为原始误差;sdual为对偶误差;εpri和εdual为给定的阈值。
1.2.3 算法评价指标和计算公式
本文采用4个评价指标全面衡量重构信号的效果,通过Misfit衡量重构信号和真实信号的误差,噪声谱指数和噪声振幅衡量残差和真实噪声的接近程度,速度不确定度衡量残差对速度估计的影响。
1)Misfit为真实信号和重构信号的标准差。2)噪声谱指数(κ)。功率谱的计算公式为[14]:
两边取对数,则有:

式中,P(f)为功率谱密度(本文采用经典周期图法计算);f为频率;P0和f0为常量。本文采用最小二乘法估计噪声谱指数。
3)噪声振幅(σ)。本文采用的噪声模型为:

式中,α为白噪声;e为白噪声的振幅;βκ为谱指数为κ的有色噪声(κ=-1为闪烁噪声);σ为谱指数为κ的有色噪声的振幅[15]。
ε的协方差矩阵C的计算公式为[16]:

式中,I为单位矩阵;Jκ为谱指数为κ的噪声的单位协方差矩阵。
4)速度不确定度(Uv)[17-19]。
式中,ΔT为时间间隔;Γ为Gamma函数。
1.2.4 算法流程
通过上述分析,基于L2优化准则的GPS坐标时间序列重构方法的具体步骤为:①根据式(2)产生时变周期的GPS坐标时间序列;②根据式(3)建立矩阵A1和A2;③根据信号的长度N,选取合适的分段长度W,并逐年滑动得到M段信号(M=([N/365]-W)+2);④针对每段信号建立式(8)的优化模型,再按照迭代步骤估计参数X1,X2;⑤初始化α、β、ρ、r、X1、X2、Z、εpri、εdual、rpri、sdual;⑥利用式(16)得到r第k次的更新rik;⑦利用式(19)得到X1的第k次更新Xk1,i;⑧利用式(20)得到X2的第k次更新Xk2,i;⑨利用式(21)得到Z的第k次更新Zik;⑩根据式(22)和式(23)分别计算rpri和sdual;⑪若rpri和sdual满足式(22)和式(23)则终止循环,否则继续重复步骤⑥~⑨;⑫重复步骤④~⑪,直到得到每段时间序列的估计;⑬依据X1和X2逐年恢复信号(重复的年份取平均),并得到残差;⑭根据式(25),利用最小二乘法得到残差的谱指数估计;⑮根据式(26)~(30),利用最大似然法得到残差的振幅估计;⑯计算重构信号的Misfit,并根据式(31)计算速度不确定度。
2 模拟实验
本文采用两组模拟数据来检验本文提出的算法性能,并与MOLS、SSA和WD方法进行对比。实验中MOLS每段时间长度为1 100 d,滑动间隔为1 a,SSA的窗口大小为4 a(窗口大小为1 460 d),WD方法采用的是Meyer小波。本文利用Misfit、噪声谱指数、噪声振幅和速度不确定度来衡量重构信号的精度。
模拟数据的参数为:t0=0,x0=10 mm,vx=5 mm/a,a1,b1~N(3,1),a2,b2~N(2,0.5),ω1=2π/365,ω2=4π/365。为了验证算法在有色噪声干扰情形下的有效性,本文模拟实验的噪声取为闪烁噪声。闪烁噪声较小时,闪烁噪声振幅取为1 mm/a-1/4;闪烁噪声较大时,闪烁噪声振幅取为10 mm/a-1/4。实验结果如表1、2所示。
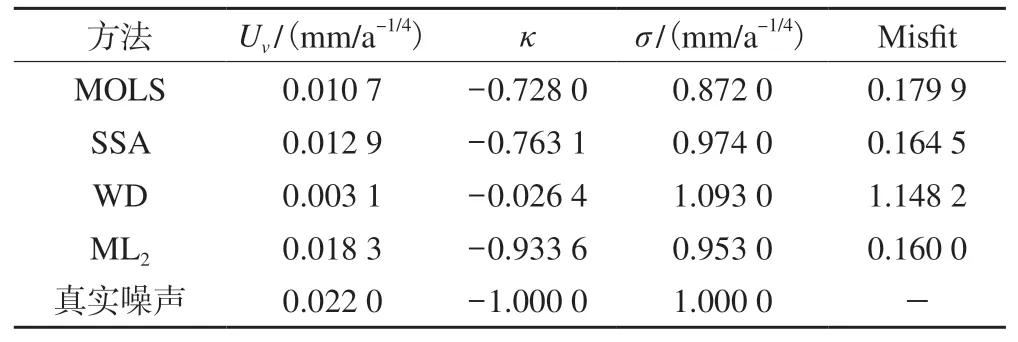
表1 噪声振幅为1 mm/a-1/4的实验结果
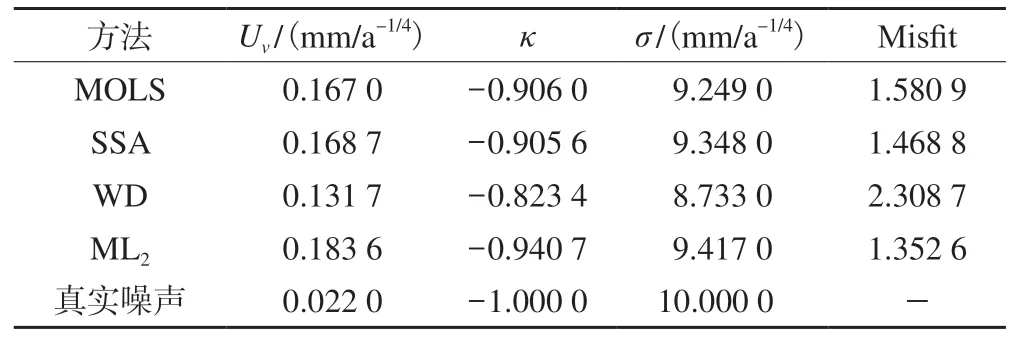
表2 噪声振幅为10 mm/a-1/4的实验结果
4种方法重构的GPS坐标时间序列对比如图1所示,可以看出,ML2比其他3种方法具有更好的重构效果,且MOLS方法过拟合导致重构GPS坐标时间序列吸收了部分噪声,而ML2方法则避免了这一点,因此效果更好。由表1、2可知,ML2方法拥有最小的Misfit,且噪声谱指数和噪声振幅与真实的最接近;SSA和MOLS方法的Misfit较大,且在噪声较小时SSA和MOLS方法会吸收闪烁噪声,导致噪声谱指数的估计较差;WD方法会吸收大量的噪声导致误差较大,尤其是在噪声较小时,WD方法与其他方法相比误差更大,重构效果最差;MOLS方法在重构GPS坐标时间序列时会吸收部分噪声,从而导致过拟合,该现象在噪声较小时尤为明显,ML2方法则有效避免了这一缺点。4种方法的频谱图如图2所示,period为真实周期,可以看出,这4种方法均能提取周期,MOLS、SSA和ML2方法均有较好表现,而WD方法则吸收了较多噪声,效果较差,尤其在噪声振幅较小时,WD方法失真。图2也证实了ML2方法能减少过拟合,从而有更好的重构效果。
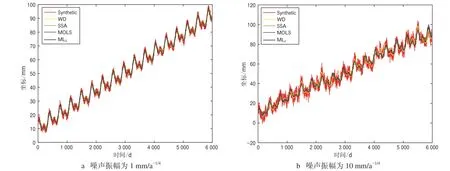
图1 4种方法的GPS坐标时间序列重构比较
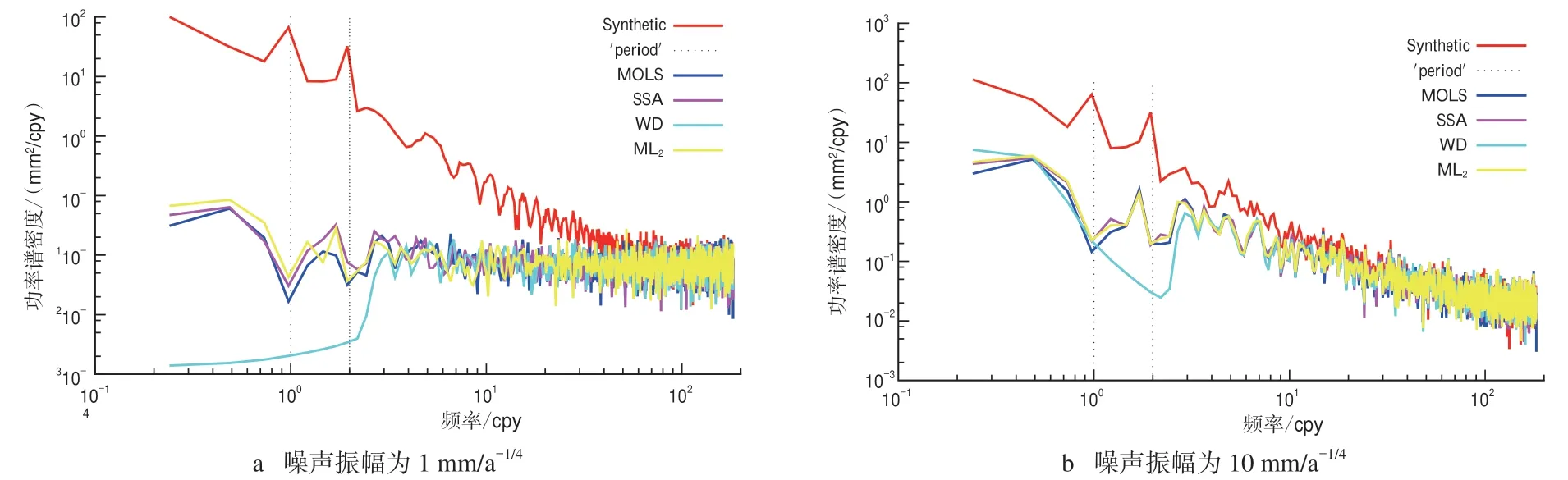
图2 4种方法的残差功率谱比较
3 真实数据分析
本文选取的是北京房山站1999-2017年的数据,实际GPS坐标时间序列缺失部分数据,且含有野值(数据观测错误),因此需对数据进行预处理。首先利用3σ准则(拉依达准则)去除野值,然后利用线性插值对缺失的部分进行补全,最后进行GPS坐标时间序列的重构。为了说明ML2方法的有效性,本文通过计算相关系数来比较4种方法之间的相似性。
实验结果如表3所示,房山站U方向4种方法的相关性如表4所示,可以看出,ML2方法介于几种方法之间,有着与其他方法相同的表现;ML2方法与MOLS方法和SSA方法的相关性较高与WD方法相关性较低;与MOLS方法相比,ML2方法减少了过拟合,从而具有更好的效果。4种方法U方向的功率谱如图3所示,可以看出,ML2方法的重构效果优于MOLS方法,表明ML2方法能通过减少过拟合来提高GPS坐标时间序列的重构精度。
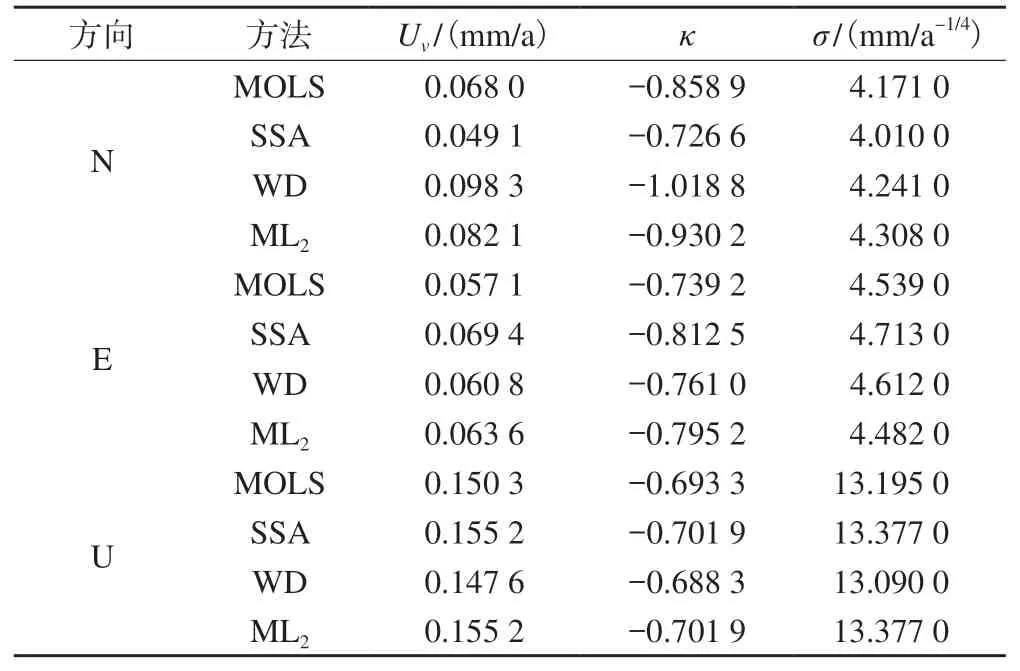
表3 房山站3个方向的实验结果
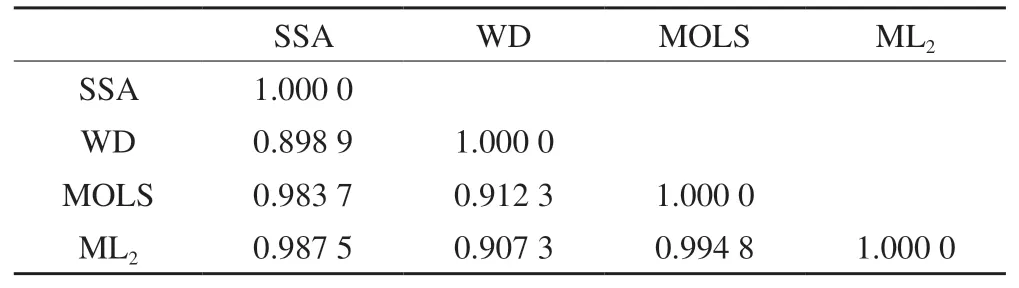
表4 房山站U方向4种方法的相关性
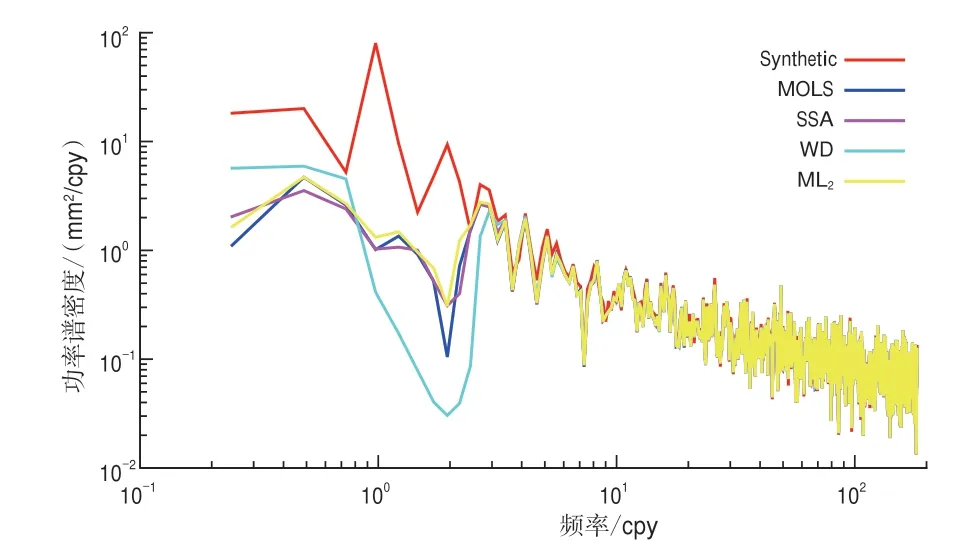
图3 房山站U方向4种方法的功率谱
4 结 语
本文研究了坐标时间序列的重构,将时变的GPS坐标时间序列模型转化为一般的GPS坐标时间序列模型。为了重构GPS坐标时间序列,本文采用ML2方法建立了优化模型,以防止过拟合,在噪声较大时能获得更好的重构效果;利用ADMM算法求解优化模型,并采用滑动的方法重构GPS坐标时间序列。通过模拟数据和真实数据的实验得到以下结论:
1)在模拟数据实验中,ML2方法能重构GPS坐标时间序列,与MOLS、SSA和WD方法相比具有最小的Misfit。从模拟实验的结果来看,ML2方法比MOLS方法的效果更好,避免了过拟合问题,使得重构的精度更高;从真实数据实验的结果来看,ML2方法的效果介于几种方法之间,证明了ML2的有效性,且与MOLS方法相比具有更好的重构效果,这也表明了ML2方法能避免过拟合问题,从而使重构精度更高。2)SSA和WD方法在信号太弱的情形下难以准确分离信号和噪声,而ML2方法则在该情形下能够得到较好的重构效果,这也体现了ML2方法相较于其他重构方法的优越性。
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
摄影世界(2022年1期)2022-01-21
数学年刊A辑(中文版)(2020年3期)2020-10-27
知识经济·中国直销(2018年12期)2018-12-29
中学生数理化·八年级物理人教版(2017年9期)2017-12-20
商周刊(2017年6期)2017-08-22
股市动态分析(2016年24期)2017-01-07
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年25期)2016-07-23
