
全自动驾驶信号系统功能需求分析
2021-03-26 03:29李暮思张蓉
电子元器件与信息技术 2021年11期
李暮思,张蓉
(1.武汉科技大学 电子信息工程(国际),湖北 武汉 430080;2.湖北第二师范学院 计算机科学与技术中外合作办学,湖北 武汉 430079)
0 引言
全自动驾驶技术一方面可以提高运行效率,另一方面还可以节约能源,可以称得上是未来轨道交通技术发展的趋势。对于全自动驾驶来说,信号系统是其核心要素,要想进一步开展该项工作,就必须对该系统的功能需求进行研究。本文以全自动驾驶影像因素分析为切入点,对信号系统的功能需求等进行了系统的梳理,希望可以为后期的系统集成及建设做好充分的准备[1]。
1 全自动驾驶信号系统影响因素分析
该系统拥有极强的自动化程度,其运行优势主要体现在以下三个方面:可靠;高效;安全。该系统的自动化运行等级非常高,车辆可以通过运营时刻表,正确实施唤醒、休眠以及启动等操作,使运行控制达到最佳程度,从而实现节能与高效。该种系统与传统信号系统存在很大的差异,具体表现在以下三个方面:①如果司机行驶于传统线路的话,一旦遇到问题可以立即采取停车措施,一切操作都由司机来实施。如果是在全自动驾驶线路,那么信号系统就可以自动执行所有控制。②当处于传统驾驶模式的时候,一旦遇到恶劣天气,司机可以及时采取恰当措施,规避风险。当处于全自动运营环境中时,如果出现了轮轨打滑的情况,信号系统就可以在第一时间感应出来,迅速加强摩擦,减缓速度。此外,该种信号系统还需要向控制中心发出信号,对运营模式做出实时改变。③要想实现全自动驾驶,就必须设置展台屏蔽门。全自动驾驶对单个屏蔽门的联动需求非常高。除此以外,在安装屏蔽门的时候,需要结合探测技术,确保人与物品出现在屏蔽门与车门之间时,会发出警报。
2 全自动驾驶信号系统功能需求
2.1 提升系统的运行等级
(1)全线自动化运行。CBTC系统是当前使用最为频繁的轨道交通信号系统,其自动化运行能力较为可观,然而,当处于车辆段及停车场的时候,对人工的需求依然无法摆脱。该种运营方式有利有弊,好的一面是管理相对独立,在进行调车作业的时候变现得非常灵活,不好的一面是信号系统与CBTC系统不同,要想确认列车能否持续行驶,需要进行两种系统的信息交互,这样做会在一定程度上影响运行效率。为了满足全自动运行模式,需要在车辆段及停车场中进行正线CBTC系统的延伸,此外,还要在车辆段中增加ATP/ATO设备,从而实现中心统一管理[2]。
(2)行车综合自动化深度集成。系统可以代替驾驶员职能,中心对各个子系统进行统一的控制及联动。行车综合自动化系统也就因此诞生,其对以往的信号系统进行了深度的集成,使将行车放在主导地位的综合控制系统得以实现。
(3)车载信号系统的唤醒休眠。当处于一般情况时,要想实现列车的运营,就必须要通过人力,然而在开启全自动驾驶模式时,信号系统就需要依赖运营时刻表,基于此,将唤醒及休眠等命令传送到车载信号系统当中。
(4)驾驶端的自动转换。当处于全自动运行的时候,列车需要集合移动授权的方向,对运行方向做出迅速判断,并对相应的驾驶端实施自动激活或自动关闭操作。
(5)全自动洗车作业。可以在信号系统中设置一个自动洗车操作,这样一来就可以实现自动洗车的功能,具体来说就是在信号系统当中,使洗车机与连锁设备合为一体,由此获取洗车状态以及清洗模式,这样就可以完成洗车作业。
(6)空车探测。当列车自动回到车辆段或停车场时,需要开启自动探测技术,确保列车当中已经没有人停留。此时,可以使用车载CCTV模糊控制技术,通过该项技术能够直接对图像做出分辨。
(7)驾驶模式极其转换。该系统对以下六种模式都予以支持:无人驾驶、限制人工驾驶、非限制人工驾驶、列车自动驾驶、蠕动、基于列车自动防护下的人工驾驶。当列车驾驶模式向低等过渡时,转换驾驶模式需要结合特定情况来考虑是否停车,当列车驾驶模式向高等转换时,转换驾驶模式不需要停车。
(8)列车工况管理。在全自动驾驶当中,为了确保列车的正常行驶,需要对列车工况做出合理的设定[3]。此外,列车的自动折返也非常关键。
2.2 提升系统的可靠及安全性能
(1)信号系统所使用的是完整的ATC,除此以外,各个子系统都需要冗余。还需要在此基础上加设车载ATO设备,一旦有故障发生,主备“无缝”切换。
(2)自动诊断及中央远程监控功能。要对该系统的诊断分析能力做出强化,通过增加与行车综合自动化系统的接口,使控制中心第一时间获取诊断信息,从而起到加强远程监控水平的作用。
(3)车载检测装置。对车载控制器系统的良好情况做出识别,从而在恰当的时间对车辆采取制动停车手段,如果出现了故障的话,控制中心就会立刻收到警报,由控制中心对车载信号设备进行复位,在确保没有车门打开或车体移动的情况下,继续运行列车。
(4)障碍物探测。为了避免障碍物误入钢轨之中,对列车脱轨情况进行有效检测,需要加设两个系统:轨道障碍物检测系统,脱轨检测系统。为了确保安全,应专门设置脱轨检测及车载障碍物装置。
2.3 停车功能需求
正线车站停车。首先是停车对位自动调整。如果误差已经大于提前设定好的停车精度,列车可以自行重新启动对位停车,此外也可以倒退对位停车。但在一系列的操作之后依然存在很大误差,就直接跳站。其次是停车倒退防护。要想完全满足全自动驾驶要求,就要加强倒退防护功能,如果误差已经大于提前设定好的距离时,就要终止列车的倒退行为,并直接开往下一站停止。同时,还需要向行调人员以及乘客等提前发出预警[4]。
紧急制动停车。在站台区域中,当出现以下几种情况时,需要立即触发紧急制动停车。第一,离站列车没有获取到相关站台屏蔽门的锁闭消息;第二,站台紧急关闭按钮受到触发;第三,通信中断;第四,人员或物品入侵轨道;第五,信号系统突发故障。除了以上提到的情况以外,当收到紧急停车指令时,也需要按照规定第一时间触发紧急制动停车。
列车初始位置确定。需要在全自动车辆的基地或停车场处安装信号标志,也可以采取适宜的定位技术,对车辆最开始的位置进行确定。此外,还需要安装信标或采取定位技术的地方包括正线及停车线,从而锁定车辆的准确停车位置。
2.4 屏蔽门/安全门的控制
对位隔离锁定功能。如果列车的车门出现故障,该辆列车在停站的时候,与其相对应的屏蔽门以及安全门也需要处于锁闭状态,一切常规的开门与关门作业都需要随之停止。此外,如果车站的屏蔽门或安全门出现了而故障,或者由人为锁闭,列车在停车靠站的时候也需要保持锁闭状态,一切相关作业停止[5]。
异物探测。在进行站台设计的时候,为了确保安全距离,在屏蔽门与车门之间留够了一定的空间。然而,这样的空间对于乘客来说却成了安全隐患,尤其是在空间较大时,乘客更有可能遇到更大的麻烦。基于多种考虑之后,决定使用激光探测技术等,通过土建,使车门与屏蔽门之间的空间尽可能地减少,一旦屏蔽门与车门之间出现人员或物品,可以第一时间被检测到。
3 系统接口
信号系统与其他系统之间存在信息交互功能,图1所呈现的就是信号系统的接口图,在实施全自动驾驶以后,以下设备都会受到一定程度的影响,需要新增接口:屏蔽门、车库门、安检中心、洗车机、人员防护等。为了将全自动驾驶的各项功能发挥到极致,及时获取系统的状态参数,可以分别通过车辆、轨旁以及车站上传至控制中心。
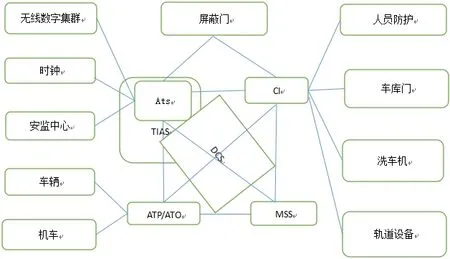
图l 信号系统接口图
4 结论
目前,在轨道行业当中,全自动驾驶技术是极其关键的发展方向,该项技术不仅能提升轨道交通系统的效率,还能够节约能源,使运行达到最佳状态。对于我国城市轨道交通而言,新型建设即将到来,要想得到进一步发展,预先做好全自动驾驶技术的研究非常重要,该系统的发展空间十分广阔。
猜你喜欢
快乐语文(2021年15期)2021-06-15
科学家(2021年24期)2021-04-25
铁道通信信号(2020年1期)2020-09-21
童话世界(2020年13期)2020-06-15
故事大王(2019年4期)2019-05-14
铁道通信信号(2019年3期)2019-04-25
城市轨道交通(2019年2期)2019-04-04
铁道通信信号(2018年12期)2019-01-31
铁道通信信号(2018年9期)2018-11-10
铁道通信信号(2018年7期)2018-08-29
