
基于飞思卡尔控制器的光电循迹机器人设计
2021-03-26 03:30阮殿旭
电子元器件与信息技术 2021年11期
阮殿旭
(沙洲职业工学院,江苏 张家港 215600)
0 引言
移动机器人是涉及机械、电子、微传感器、微机控制,控制工程技术等多个学科的综合性系统,是现在智能移动机器人领域的热点研究方向之一[1-4]。随着工业智能化及物流行业的快速发展,物流移动机器人正在进行技术革新,发展的趋势智能化、集群化、模块化等[5]。由于传统的循迹移动机器人速度快、成本高;低成本时,运行效果又不理想[6-7]。针对此问题,本文提出了一种基于飞思卡尔控制器的智能轮式循迹机器人设计方案。
1 移动机器人的整体系统设计
采用飞思卡尔控制器KL25为核心,结合相应传感器、数字舵机、动力锂电池及相应的驱动电路,通过自动控制技术,自主识别运行路径,控制移动机器人自主识别运行线路,并高速稳定地行驶到目的地。
轮式循迹机器人是一个闭环控制系统,系统框图如图1所示。控制系统的输入包括路径信息、机器人的运行速度信息和转向信息;输出包括转向控制信息输出和速度控制输出。路径信息和速度信息通过光电传感器和测速编码器将信号传送到控制器,经过控制器的处理决策以后,输出控制移动机器人的转向和速度。整个系统协调工作,可以实现快速稳定的运行。
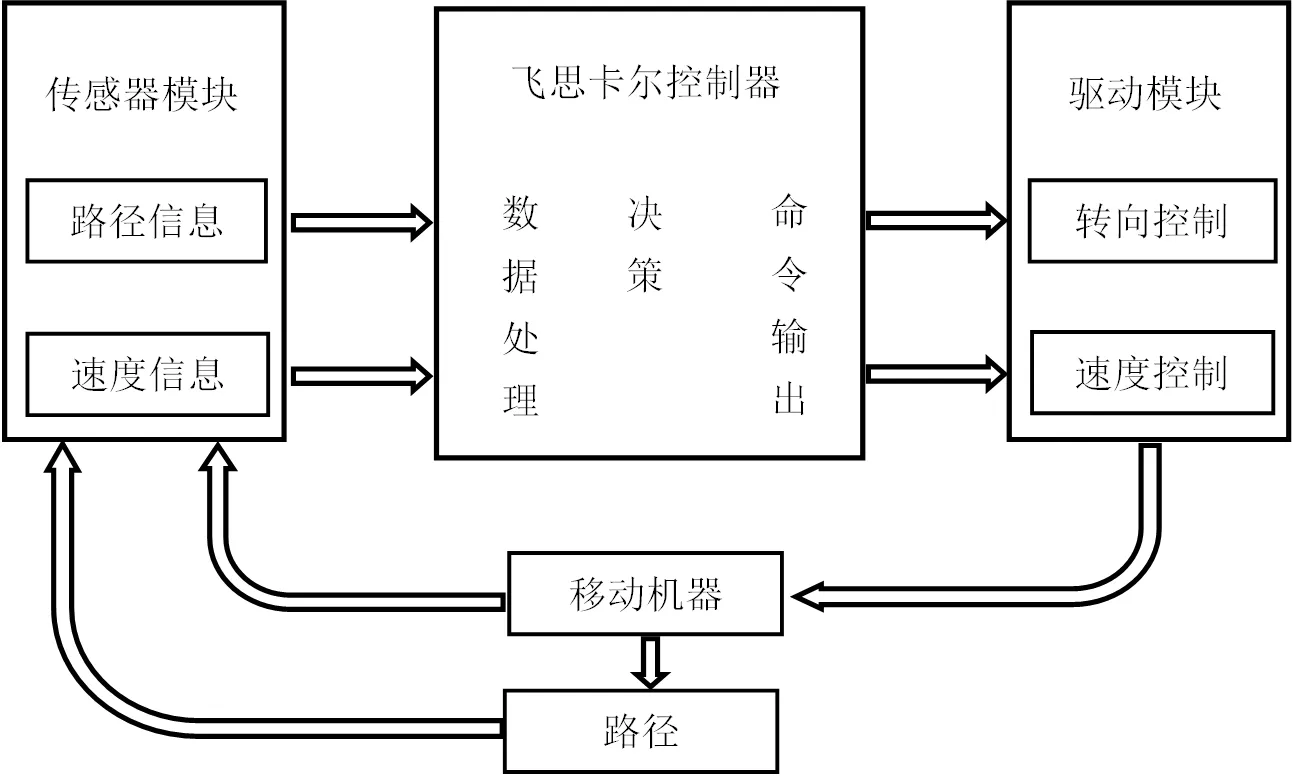
图1 机器人系统框图
2 硬件设计
轮式移动机器人的控制部分以飞思卡尔K25L为核心,该控制器采用ARM Cortex-M0+内核,频率为8MHZ,128KB闪存,16KB SRAM,具有多种通信方式,同时具备OpenSDA接口功能,方便调试。
控制系统的硬件模块包括:电源稳压管理模块,路径信息识别模块,速度检测模块,电机驱动模块,信号校正模块,调试接口模块等。硬件结构图如图2所示。
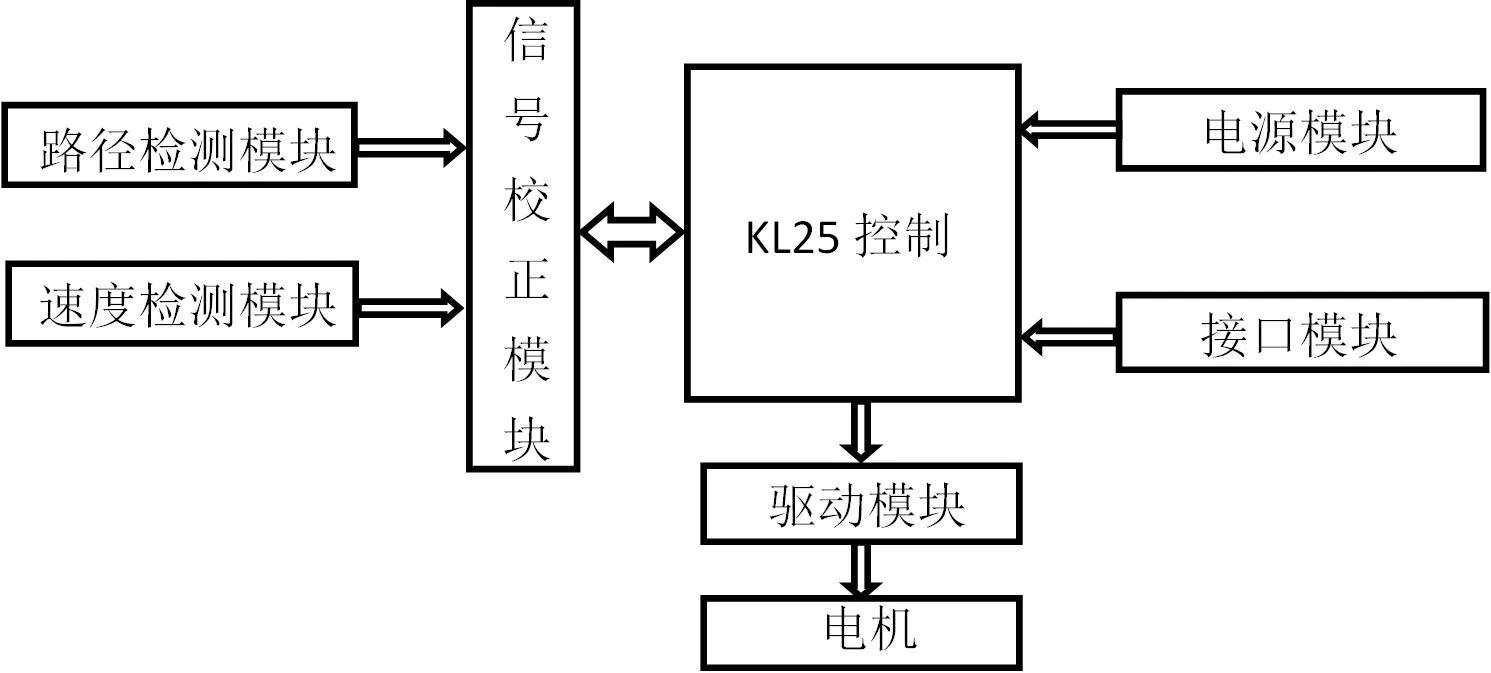
图2 移动机器人硬件结构图
2.1 电源模块
移动机器人使用7.4V的2S动力锂电池作为电源,通过稳压电路产生稳定的5V电压供给控制器和传感器,舵机等则直接使用7.4V电压,可以提高舵机等灵敏度和动力。5V稳压电路采用TL494稳压芯片,13脚输出5V电压误差可以达到0.05V。
2.2 光电传感单元
采用红外光电传感器,其由红外线发射、光敏接收管组成。光敏接收管的阻值对光线强度变化非常敏感,随着接受到的光线的强弱,接收管的阻值可以从几千欧到几百千欧变化,当红外光线发射到地面时,地面上的路径和周围不一致,产生的反射强度也不一样,位于不同位置的红外传感器,就可以根据反射光的强度不同产生不同的阻值,从而来区分地面的路径引导信息。
3 软件设计
移动机器人为了克服在快速移动时二值判断连续性差,运动稳定性不足的缺点,本系统采用慢速移动二值判断和快速运动连续识别相结合的信号处理算法。
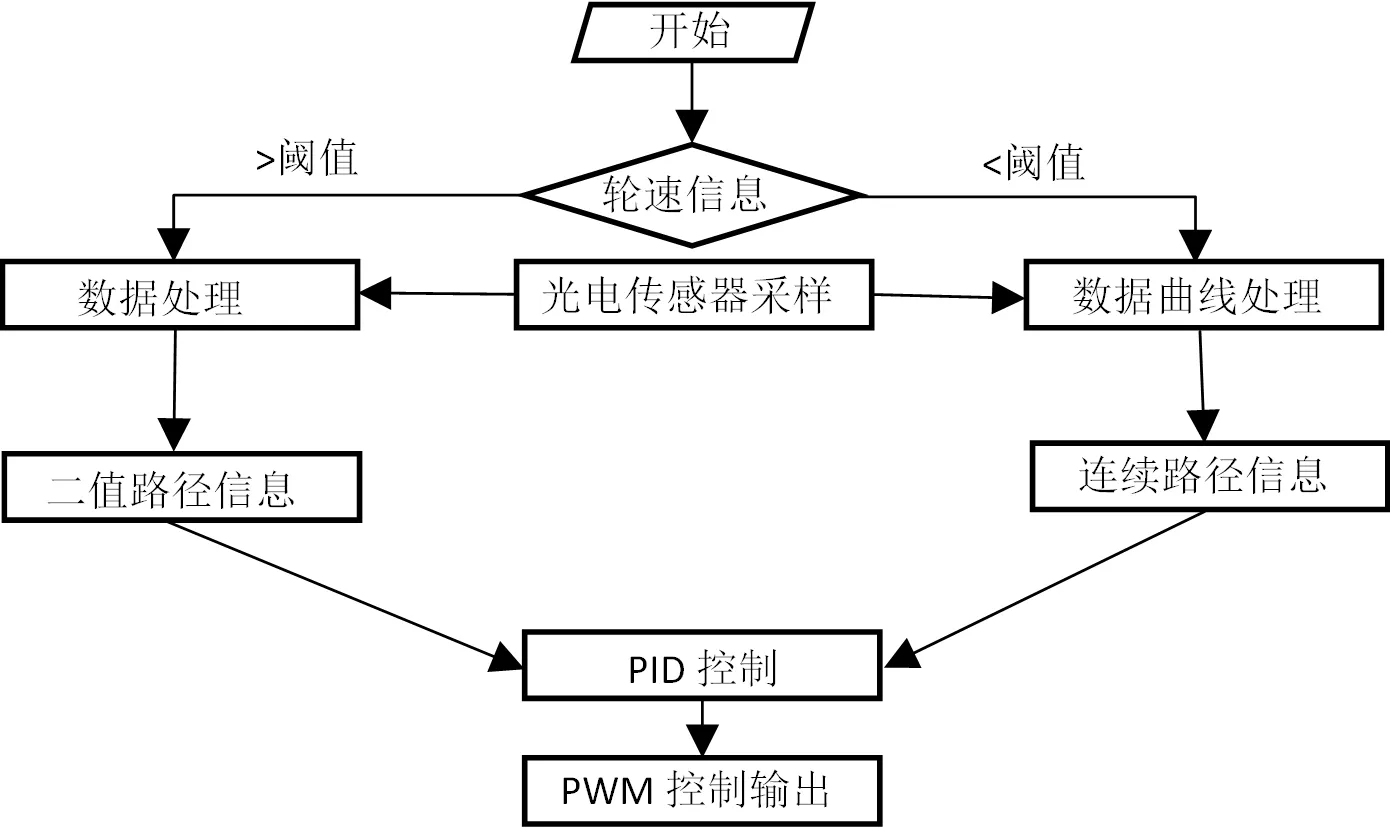
图3 机器人控制流程图
根据实际运行情况,预先设定一个速度阈值,当实际运行速度小于阈值时,红外传感器根据检测数值判断为两种(引导路径和其他地面);当实际运行速度大于设定阈值时,红外光电传感器的输出信号与路面对光线的反射率及传感器与引导标记的水平距离有定量关系,根据这种关系,就可以推出传感器输出信号与引导标记线偏移距离关系,从而获得车身中心相对于黑线的更精确的位置,得到连续分布的路径信息,克服了二值判断时,大量细节信息的缺失问题。
移动机器人使用的飞思卡尔控制器,为了实现控制算法的程序实现,需要使用离散PID算法来控制舵机的速度,关系式如下:

式中e(n) 表示机器人在运行的实际速度和给定速度差值信息。
4 结论
本文介绍一种采用了飞思卡尔控制器,通过在不同运动速度的情况下,使用不同的路径分析方法,精确控制机器人完成快速和慢速时的循迹,通过离散PID算法完成电机速度控制,通过测试验证达到了预期要求,在必要时可以提高路径检测精度,同时保证运行的流畅稳定性。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
北京航空航天大学学报(2022年6期)2022-07-02
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
制造技术与机床(2017年3期)2017-06-23
电子制作(2017年1期)2017-05-17
厦门理工学院学报(2016年1期)2016-12-01
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28
中国汽车市场(2012年24期)2012-08-23
网络安全与数据管理(2012年16期)2012-03-19
